
热门标签
热门文章
- 1【数据结构】二叉树--链式结构_数据结构找树的叶子节点的算法
- 2Github访问慢解决办法_github打开慢
- 3SpringBoot service层测试类_spring boot services层
- 4二叉树的存储结构类型_二叉链表存储的类型定义是什么
- 5并查集(带权/拓展域)_拓展域并查集
- 6Ai绘画工具Stable Diffusion,最全提示词使用指南!建议收藏!_stable diffusion的加号
- 7Science Advances:社会和健康科学中用于描述、预测和因果推理的机器学习方法_寻找与目标变量具有相关性的因子作为输入变量进行预测的外文文献
- 87 Series FPGAs Integrated Block for PCI Express IP核 Advanced模式配置详解(三)_advanced设置
- 92024年Python最新网络爬虫——由模拟登录扯开去(1)
- 10day05-搭建个人Leanote云笔记本_leanote 2.6 安装
当前位置: article > 正文
卡尔曼滤波 Kalman Filter 理解 (超简单),带仿真
作者:盐析白兔 | 2024-05-30 22:40:18
赞
踩
卡尔曼滤波
卡尔曼滤波 Kalman Filter 精简理解
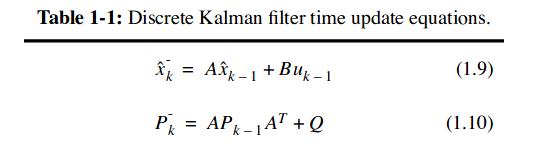
核心过程一 (时间更新:)
初始输入(k-1时刻):系统最优状态、系统噪声协方差
系统状态转移方程(1.9)
过程噪声协方差 (1.10)
核心过程二 (测量更新:)
计算卡尔曼增益K (1.11)
根据卡尔曼增益K,计算最优当前状态 (1.12)
根据卡尔曼增益K,计算当前系统噪声协方差 (1.13)

图表化整个循环迭代过程

MATLAB代码
% % --------------------------------------------------------------------- % % Copyright 2019 wmx qq 843230304 % % --------------------------------------------------------------------- % function y = kalman01(z) %-------初始化----------------------------- % 初始化 状态转移系数矩阵A dt=1; A=[ 1 0 dt 0 0 0;... 0 1 0 dt 0 0;... 0 0 1 0 dt 0;... 0 0 0 1 0 dt;... 0 0 0 0 1 0 ;... 0 0 0 0 0 1 ]; % Measurement matrix % 系统测量系数矩阵 H = [ 1 0 0 0 0 0; 0 1 0 0 0 0 ]; % 状态转移过程噪声 Q = eye(6); % 测量噪声 R = 1000 * eye(2); % Initial conditions % 系统状态和协方差初始条件 persistent x_est p_est if isempty(x_est) x_est = zeros(6, 1); p_est = zeros(6, 6); end %----------------Predicted state and covariance------------------------- % 根据状态转移方程 预测理论值(预测状态 预测协方差) x_prd = A * x_est; p_prd = A * p_est * A' + Q; % ------------------- Estimation -------------------------------------------- % 最优估计(根据理论预测和测量,使误差最小) % 计算卡尔曼增益klm_gain S = H * p_prd' * H' + R; B = H * p_prd'; klm_gain = (S \ B)'; % Estimated state and covariance % 根据卡尔曼增益klm_gain, % 最优估计系统 当前状态x_est 当前协方差p_est, 提供下次迭代计算使用 x_est = x_prd + klm_gain * (z - H * x_prd); p_est = p_prd - klm_gain * H * p_prd; % Compute the estimated measurements % 卡尔曼滤波输出 y = H * x_est; end

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
仿真输出

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/648944
推荐阅读
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

