
热门标签
热门文章
- 1文件后缀大全_bpccnv
- 2数据结构初阶 —— 常见排序_数据结构排序
- 3极市平台|100+深度学习各方向数据集资源大盘点_csiq数据集 百度网盘
- 4pynput实现自动化_python pynput库
- 5【Unity地编】地形系统搭建入门详解_unity地编教程
- 6STM32学习记录——烟雾传感器的使用_stm32烟雾传感器
- 7重测序专题(二)| 不断完善的参考基因组_基因组重测序得到的是片段吗
- 8决策树模型学习笔记(案例分析、推算过程、python代码)_决策树简单案例
- 9InterSystems IRIS使用python pyodbc连接 linux环境,odbc驱动安装,DSN配置,数据源配置,linux中文不展示问题
- 10【微信支付】【java】Springboot对接开发微信支付_wechatpay-java
当前位置: article > 正文
【ROS】ROS 发布和订阅压缩图像消息 CompressedImage_ros compressedimage
作者:盐析白兔 | 2024-07-18 12:09:16
赞
踩
ros compressedimage
使用 cv_bridge 发布/订阅压缩图像
参考 cv_bridge 文档
发送图像
from sensor_msgs.msg import CompressedImage
from cv_bridge import CvBridge
# 创建 publisher
cimage_pub = rospy.Publisher("/image/compressed", CompressedImage, queue_size=1)
# 创建并发送压缩图像消息
compressed_msg = CvBridge().cv2_to_compressed_imgmsg(image, "jpg")
compressed_msg.header.stamp = rospy.Time.now()
cimage_pub.publish(compressed_msg)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
其中 “jpg” 表示将图像压缩的目标格式,还有很多其他参数可选,如下所示
但亲测 “jpg” 压缩比最大,图像传输占用的带宽最少
bmp, dib
jpeg, jpg, jpe
jp2
png
pbm, pgm, ppm
sr, ras
tiff, tif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
接收图像
from sensor_msgs.msg import CompressedImage
from cv_bridge import CvBridge
# 定义回调函数
def cvbridge_callback(self, data):
image = CvBridge().compressed_imgmsg_to_cv2(data, "bgr8")
# 创建 subscriber
rospy.Subscriber("/image/compressed", CompressedImage, cvbridge_callback, queue_size=1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
其中 “bgr8” 表示将图像解析为 “bgr8” 格式,也是 opencv 默认的图像格式
使用 opencv 手动发布/订阅
参考 rospy wiki 教程
参考 opencv 中 imencode 与 imdecode 文档说明
发送图像
from sensor_msgs.msg import CompressedImage
import cv2
import numpy as np
# 创建 publisher
cimage_pub = rospy.Publisher("/image/compressed", CompressedImage, queue_size=1)
# 创建并发送压缩图像消息
compressed_msg = CompressedImage()
compressed_msg.header.stamp = rospy.Time.now()
compressed_msg.format = "jpg"
compressed_msg.data = np.array(cv2.imencode('.jpg', image)[1]).tobytes()
cimage_pub.publish(compressed_msg)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
“jpg” 作用同上,需要手动设置 compressed_msg.format 表示为压缩格式(但亲测不设置对 rqt 显示和解压缩也没啥影响)
此外,可以手动调节压缩图像的相关参数,如调整 jpg 图像压缩质量为 5(默认为 95)
# 创建并发送压缩图像消息
compressed_msg = CompressedImage()
compressed_msg.header.stamp = rospy.Time.now()
compressed_msg.format = "jpg"
compressed_msg.data = np.array(cv2.imencode('.jpg', image, [cv2.IMWRITE_JPEG_QUALITY, 5])[1]).tobytes()
cimage_pub.publish(compressed_msg)
- 1
- 2
- 3
- 4
- 5
- 6
接收图像
from sensor_msgs.msg import CompressedImage
import cv2
import numpy as np
# 定义回调函数
def cv2_callback(self, data):
image = np.frombuffer(data.data, np.uint8)
image = cv2.imdecode(image, cv2.IMREAD_COLOR)
# 创建 subscriber
rospy.Subscriber("/image/compressed", CompressedImage, cv2_callback, queue_size=1)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
使用 image_transport 将发送的图像转发为压缩图像
参考 image_transport wiki
如果不想写程序对图像进行处理,可以使用 image_transport 包的命令行工具来将 Image 消息转发为 CompressedImage 消息
rosrun image_transport republish raw in:=/image compressed out:=/image
- 1
该节点会自动订阅/image话题下的Image消息,并将CompressedImage格式的消息发送到/image/compressed话题下
压缩的相关参数可以通过 rqt 工具箱里的 Dynamic Reconfigure 工具箱进行调整:
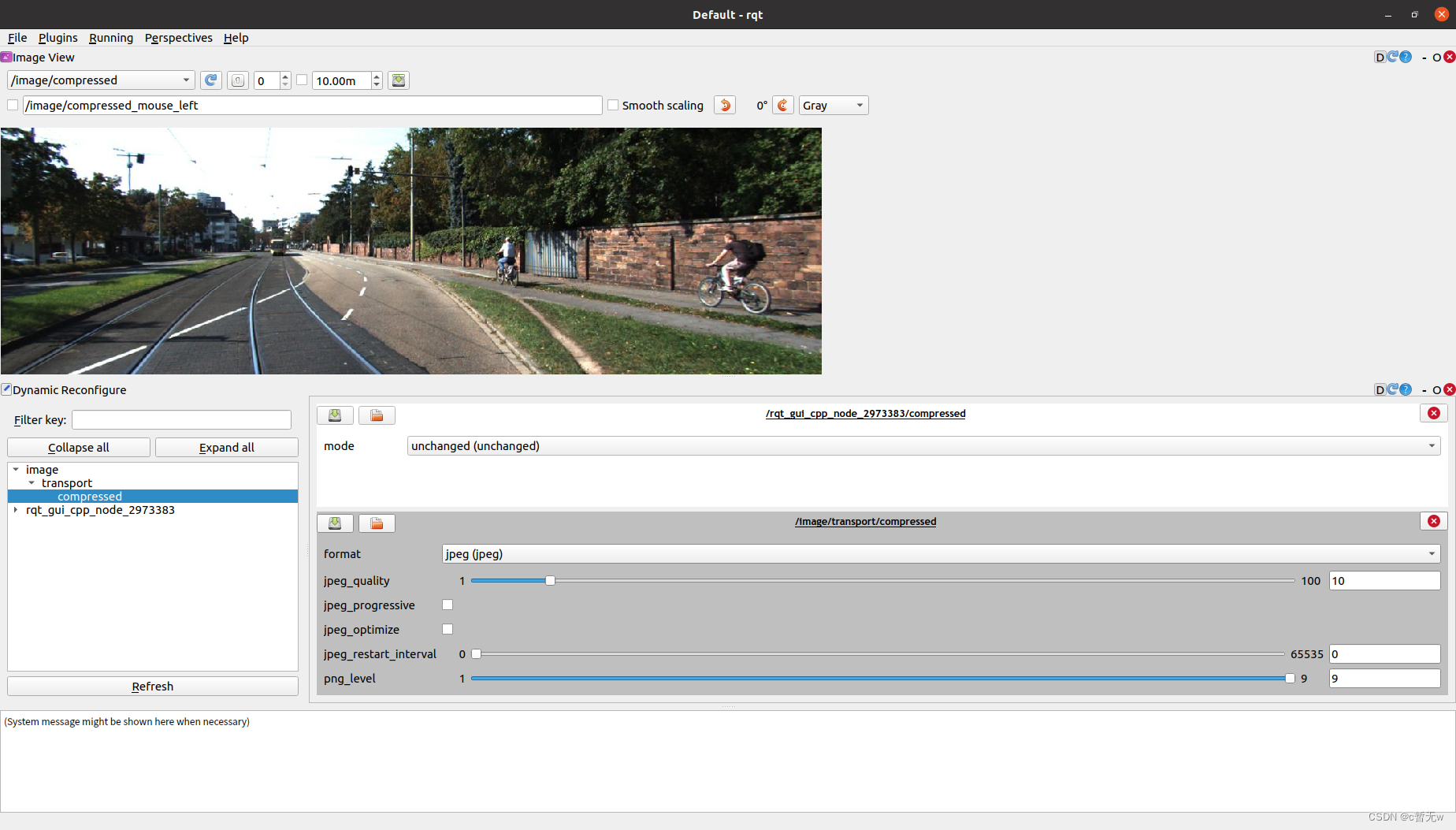
效果展示

如果 rqt 可视化过程中显示错误:Unable to load plugin for transport ‘cvbridge_compressed’
可参考 【ROS】rqt显示压缩图像话题报错:Unable to load plugin for transport ‘cvbridge_compressed’
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/845590
推荐阅读
相关标签

