
热门标签
热门文章
- 1PHP如何下载对应的XDebug版本_xdebug历史版本下载
- 2HTML生日快乐代码 (粉色主题)(HTML5+CSS3+JS)520表白代码/七夕情人节网页/告白/求婚/生日快乐_生日快乐的链接代码
- 3unity2d人物真实跳跃实现(RigidBody添加力的作用)_unity rigidbody2d.addforce()
- 4matlab实现瑞利信道需要的步骤,瑞利信道Matlab仿真程序
- 5ZooKeeper 集群最少要几台服务器,为什么?_zookeeper最少几台
- 6css的主题,CSS主题切换
- 7python网络编程之websocket_python websocket客户端
- 8Vue3+element ui取消el-select下拉选边框_vue3中使用elementplus选择器的边框如何去掉
- 9Java依赖管理-eclipse中使用maven_eclipse 管理java依赖项
- 10数据预处理_对一个属性的所有遗漏的值军利用一个用零来填补这属于缺失数据处理中的什么
当前位置: article > 正文
基于YOLOV5 的多分类 + 关键点检测_yolo关键点检测
作者:盐析白兔 | 2024-02-16 23:36:15
赞
踩
yolo关键点检测
私聊我拉你进群交流
- 1
一 模型介绍
yoloV5主要是用于目标的检测,针对检测过程中,一些关键点的输出也是至关重要,其中有yolo-face等目标检测+关键点模型,但是目前所有模型都是单分类+关键点的检测,为了设置多分类+关键点检测,这里我在使用单分类+关键点(yolov5-car-plate)的代码基础上进行修改,实现多分类+关键点检测。
二 模型修改
1 数据代码修改
数据代码修改主要是在 utils/plate_datasets.py 代码下
- 读取数据部分
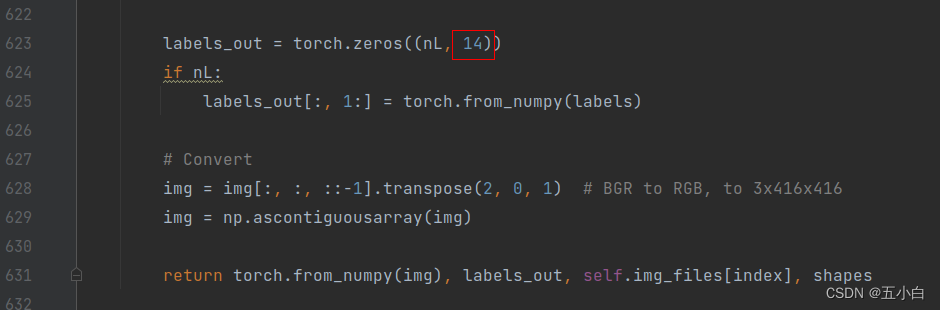
首先修改 LoadImagesAndLabels 类中方法,添加426行代码
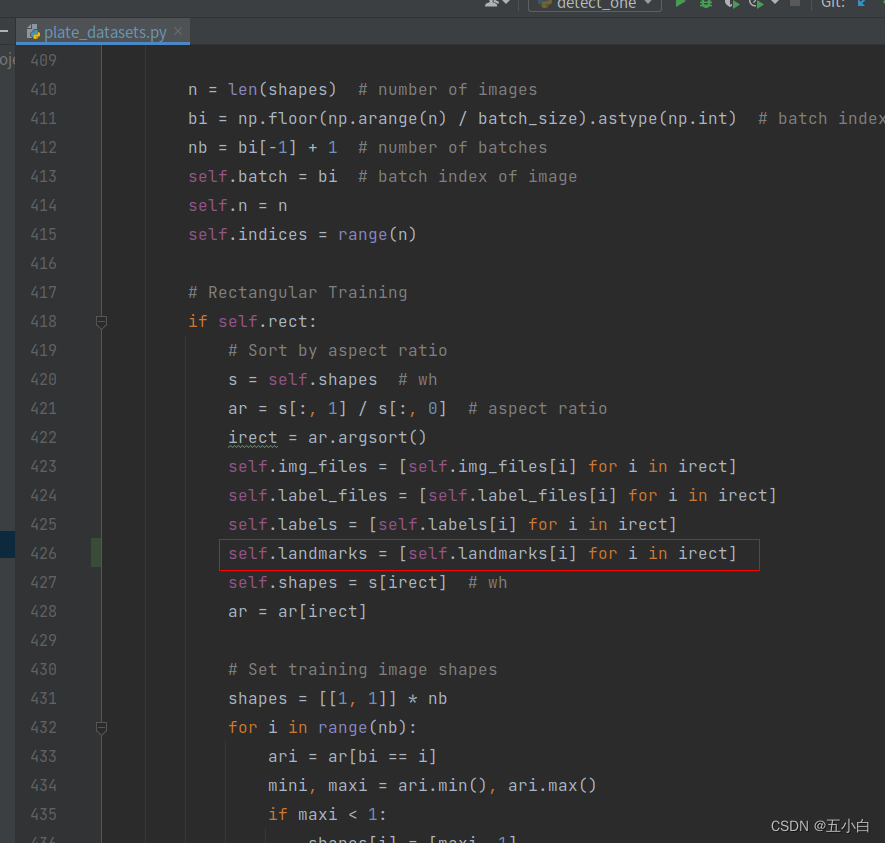
读取数据报错,做如下修改
按照制作数据进行依次修改读取数据代码:
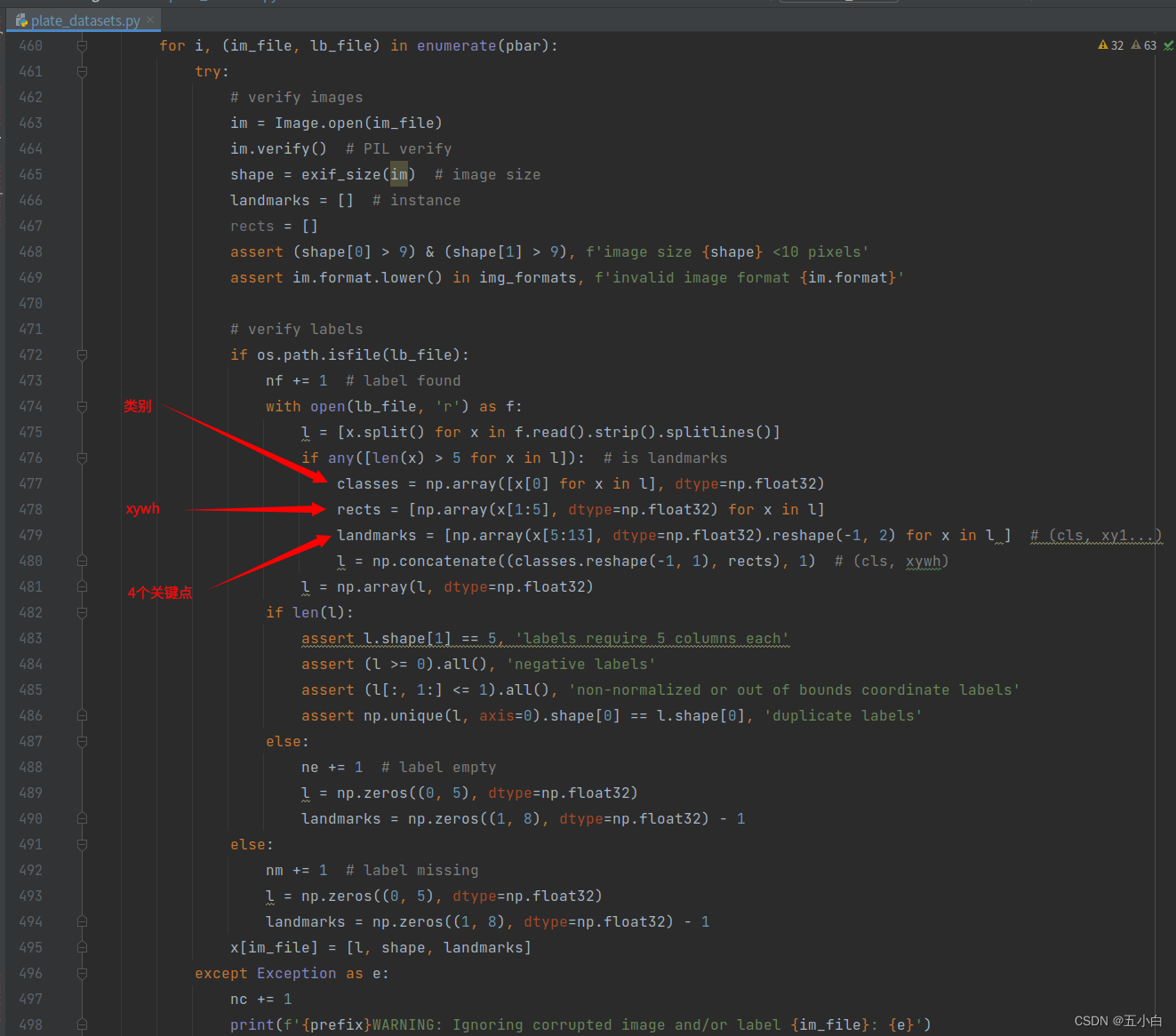
由于我自己的数据标签依次是 :
class,x , y ,w,h, x1 ,y1, x2, y2, x3, y3, x4, y4
所以这部分是没有修改的,这里根据自己的关键点数量进行修改。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
数据示例:

-
数据增强-马赛克增强
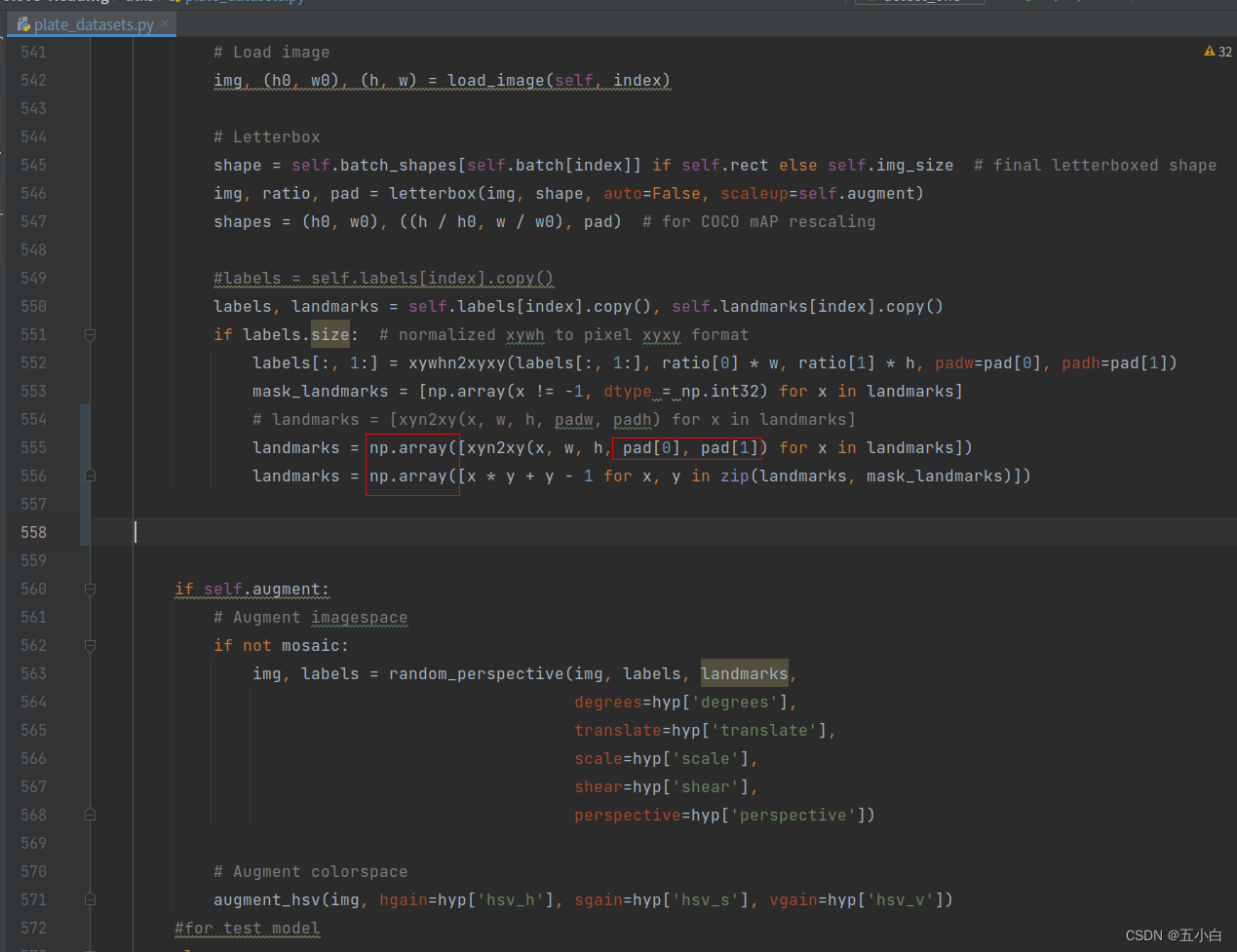
我自己的数据和作者数据是一样的4个点,所以马赛克增强也是一样的,大家根据自己的点进行修改
-
输入数据维度修改
2 网络结构修改
网络结构代码位于 model/yolo_plate.py
-
修改总输出维度
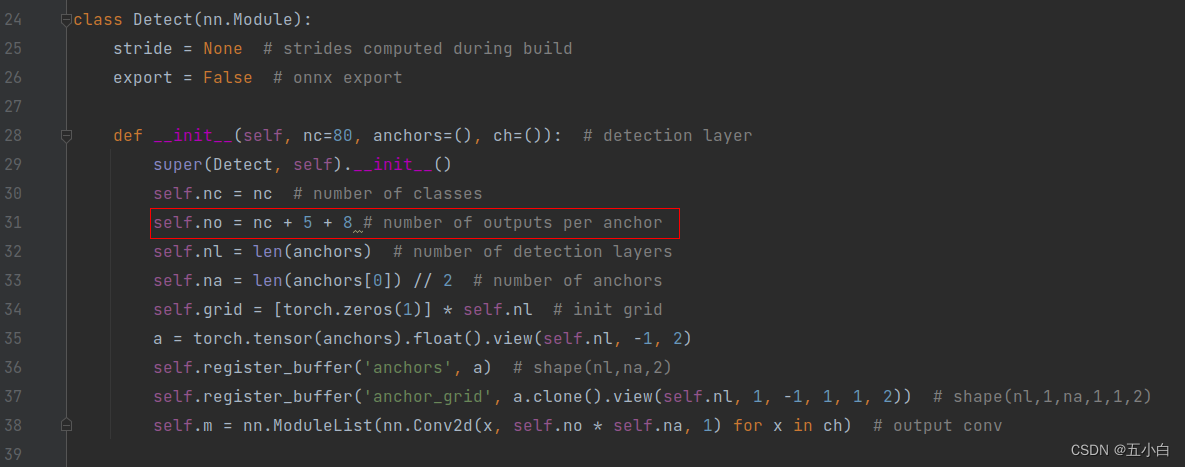
每个维度输出多4个点,也就是8个输出 -
网络结构修改
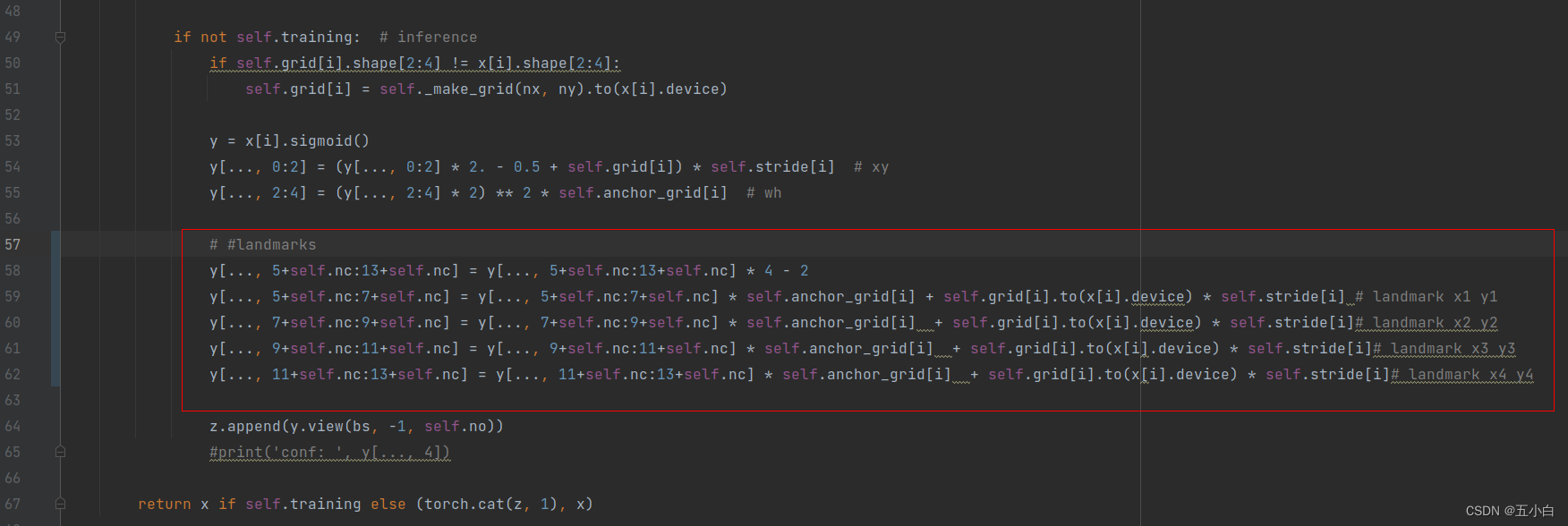
主要是确定点的输出位置,后面根据点的输出计算loss -
完整修改代码
class Detect(nn.Module):
stride = None # strides computed during build
export = False # onnx export
def __init__(self, nc=80, anchors=(), ch=()): # detection layer
super(Detect, self).__init__()
self.nc = nc # number of classes
self.no = nc + 5 + 8 # number of outputs per anchor
self.nl = len(anchors) # number of detection layers
self.na = len(anchors[0]) // 2 # number of anchors
self.grid = [torch.zeros(1)] * self.nl # init grid
a = torch.tensor(anchors).float().view(self.nl, -1, 2)
self.register_buffer('anchors', a) # shape(nl,na,2)
self.register_buffer('anchor_grid', a.clone().view(self.nl, 1, -1, 1, 1, 2)) # shape(nl,1,na,1,1,2)
self.m = nn.ModuleList(nn.Conv2d(x, self.no * self.na, 1) for x in ch) # output conv
def forward(self, x):
# x = x.copy() # for profiling
z = [] # inference output
self.training |= self.export
for i in range(self.nl):
x[i] = self.m[i](x[i]) # conv
bs, _, ny, nx = x[i].shape # x(bs,255,20,20) to x(bs,3,20,20,85)
x[i] = x[i].view(bs, self.na, self.no, ny, nx).permute(0, 1, 3, 4, 2).contiguous()
if not self.training: # inference
if self.grid[i].shape[2:4] != x[i].shape[2:4]:
self.grid[i] = self._make_grid(nx, ny).to(x[i].device)
y = x[i].sigmoid()
y[..., 0:2] = (y[..., 0:2] * 2. - 0.5 + self.grid[i]) * self.stride[i] # xy
y[..., 2:4] = (y[..., 2:4] * 2) ** 2 * self.anchor_grid[i] # wh
# #landmarks
y[..., 5+self.nc:13+self.nc] = y[..., 5+self.nc:13+self.nc] * 4 - 2
y[..., 5+self.nc:7+self.nc] = y[..., 5+self.nc:7+self.nc] * self.anchor_grid[i] + self.grid[i].to(x[i].device) * self.stride[i] # landmark x1 y1
y[..., 7+self.nc:9+self.nc] = y[..., 7+self.nc:9+self.nc] * self.anchor_grid[i] + self.grid[i].to(x[i].device) * self.stride[i]# landmark x2 y2
y[..., 9+self.nc:11+self.nc] = y[..., 9+self.nc:11+self.nc] * self.anchor_grid[i] + self.grid[i].to(x[i].device) * self.stride[i]# landmark x3 y3
y[..., 11+self.nc:13+self.nc] = y[..., 11+self.nc:13+self.nc] * self.anchor_grid[i] + self.grid[i].to(x[i].device) * self.stride[i]# landmark x4 y4
z.append(y.view(bs, -1, self.no))
#print('conf: ', y[..., 4])
return x if self.training else (torch.cat(z, 1), x)
@staticmethod
def _make_grid(nx=20, ny=20):
yv, xv = torch.meshgrid([torch.arange(ny), torch.arange(nx)])
return torch.stack((xv, yv), 2).view((1, 1, ny, nx, 2)).float()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
3 loss代码修改
loss修改代码位于: utils/plate_loss.py
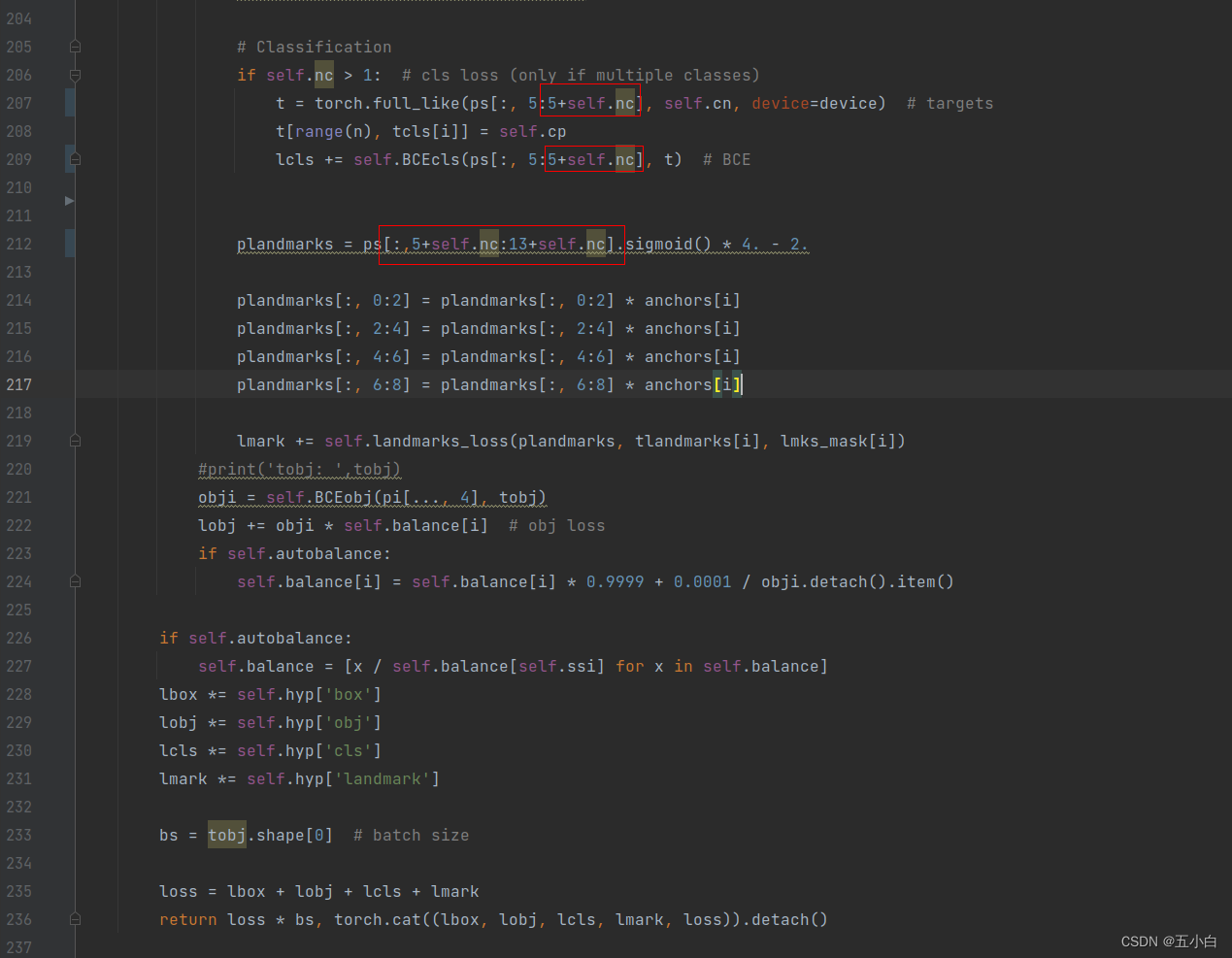
框出来的位置注意查看,代码修改主要是确定坐标点的位置,然后将坐标点进行loss计算,进行反向传播。
# 修改后的__call__代码块 :
def __call__(self, p, targets): # predictions, targets, model
device = targets.device
lcls, lbox, lobj, lmark = torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device), torch.zeros(1, device=device)
tcls, tbox, indices, anchors, tlandmarks, lmks_mask = self.build_targets(p, targets) # targets
# Losses
for i, pi in enumerate(p): # layer index, layer predictions
b, a, gj, gi = indices[i] # image, anchor, gridy, gridx
tobj = torch.zeros_like(pi[..., 0], device=device) # target obj
n = b.shape[0] # number of targets
#print('pi: ', pi.shape)
if n:
ps = pi[b, a, gj, gi] # prediction subset corresponding to targets
# Regression
pxy = ps[:, :2].sigmoid() * 2. - 0.5
pwh = (ps[:, 2:4].sigmoid() * 2) ** 2 * anchors[i]
pbox = torch.cat((pxy, pwh), 1) # predicted box
iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=True) # iou(prediction, target)
lbox += (1.0 - iou).mean() # iou loss
# Objectness
tobj[b, a, gj, gi] = (1.0 - self.gr) + self.gr * iou.detach().clamp(0).type(tobj.dtype) # iou ratio
#print('tobj: ',tobj[b, a, gj, gi] )
# Classification
if self.nc > 1: # cls loss (only if multiple classes)
t = torch.full_like(ps[:, 5:5+self.nc], self.cn, device=device) # targets
t[range(n), tcls[i]] = self.cp
lcls += self.BCEcls(ps[:, 5:5+self.nc], t) # BCE
plandmarks = ps[:,5+self.nc:13+self.nc].sigmoid() * 4. - 2.
plandmarks[:, 0:2] = plandmarks[:, 0:2] * anchors[i]
plandmarks[:, 2:4] = plandmarks[:, 2:4] * anchors[i]
plandmarks[:, 4:6] = plandmarks[:, 4:6] * anchors[i]
plandmarks[:, 6:8] = plandmarks[:, 6:8] * anchors[i]
lmark += self.landmarks_loss(plandmarks, tlandmarks[i], lmks_mask[i])
#print('tobj: ',tobj)
obji = self.BCEobj(pi[..., 4], tobj)
lobj += obji * self.balance[i] # obj loss
if self.autobalance:
self.balance[i] = self.balance[i] * 0.9999 + 0.0001 / obji.detach().item()
if self.autobalance:
self.balance = [x / self.balance[self.ssi] for x in self.balance]
lbox *= self.hyp['box']
lobj *= self.hyp['obj']
lcls *= self.hyp['cls']
lmark *= self.hyp['landmark']
bs = tobj.shape[0] # batch size
loss = lbox + lobj + lcls + lmark
return loss * bs, torch.cat((lbox, lobj, lcls, lmark, loss)).detach()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
三 注意事项
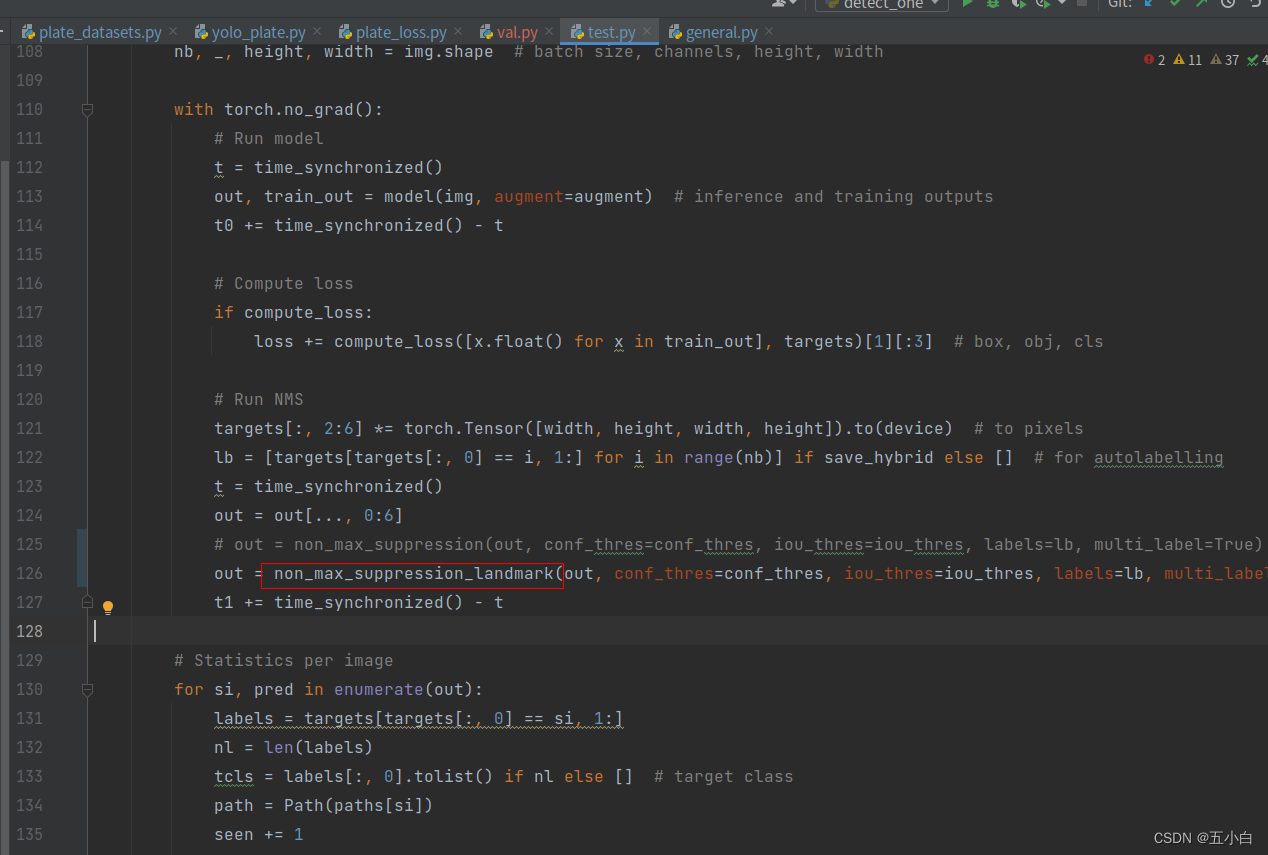
1 训练问题,原代码没有修改val的代码,所以val的过程是错误的。
增加 non_max_suppression_landmark 方法修改val过程中nms计算
- 1
# 新建non_max_suppression_landmark 方法, 注意阅读代码后半部分文字。
def non_max_suppression_landmark(prediction, conf_thres=0.25, iou_thres=0.45, classes=None, agnostic=False, multi_label=True, labels=()):
"""Performs Non-Maximum Suppression (NMS) on inference results
Returns:
detections with shape: nx6 (x1, y1, x2, y2, conf, cls)
"""
nc = prediction.shape[2] - 13 # number of classes
xc = prediction[..., 4] > conf_thres # candidates
#print('xc: ', prediction[..., 4] )
# Settings
min_wh, max_wh = 2, 4096 # (pixels) minimum and maximum box width and height
max_det = 300 # maximum number of detections per image
max_nms = 30000 # maximum number of boxes into torchvision.ops.nms()
time_limit = 10.0 # seconds to quit after
redundant = True # require redundant detections
multi_label &= nc > 1 # multiple labels per box (adds 0.5ms/img)
merge = False # use merge-NMS
t = time.time()
output = [torch.zeros((0, nc +14 ), device=prediction.device)] * prediction.shape[0]
for xi, x in enumerate(prediction): # image index, image inference
# Apply constraints
# x[((x[..., 2:4] < min_wh) | (x[..., 2:4] > max_wh)).any(1), 4] = 0 # width-height
x = x[xc[xi]] # confidence
# Cat apriori labels if autolabelling
if labels and len(labels[xi]):
l = labels[xi]
v = torch.zeros((len(l), nc + 13), device=x.device)
v[:, :4] = l[:, 1:5] # box
v[:, 4] = 1.0 # conf
v[range(len(l)), l[:, 0].long() + nc + 13] = 1.0 # cls
x = torch.cat((x, v), 0)
# If none remain process next image
if not x.shape[0]:
continue
# Compute conf
x[:, 5:5+nc] *= x[:, 4:5] # conf = obj_conf * cls_conf
# Box (center x, center y, width, height) to (x1, y1, x2, y2)
box = xywh2xyxy(x[:, :4])
# Detections matrix nx6 (xyxy, conf, landmarks, cls)
if multi_label:
i, j = (x[:, 5:5+nc] > conf_thres).nonzero(as_tuple=False).T
x = torch.cat((box[i], x[i, j + 5, None], x[i, 5:13+nc], j[:, None].float()), 1) # 5+nc:12+nc
else: # best class only
conf, j = x[:, 5:5+nc].max(1, keepdim=True)
x = torch.cat((box, conf, x[:, 5:13+nc], j.float()), 1)[conf.view(-1) > conf_thres]
# Filter by class
if classes is not None:
x = x[(x[:, 5:6] == torch.tensor(classes, device=x.device)).any(1)]
# Apply finite constraint
# if not torch.isfinite(x).all():
# x = x[torch.isfinite(x).all(1)]
# Check shape
n = x.shape[0] # number of boxes
if not n: # no boxes
continue
elif n > max_nms: # excess boxes
x = x[x[:, 4].argsort(descending=True)[:max_nms]] # sort by confidence
# Sort by confidence
# x = x[x[:, 4].argsort(descending=True)]
# Batched NMS
c = x[:, 5:6] * (0 if agnostic else max_wh) # classes
boxes, scores = x[:, :4] + c, x[:, 4] # boxes (offset by class), scores
i = torchvision.ops.nms(boxes, scores, iou_thres) # NMS
if i.shape[0] > max_det: # limit detections
i = i[:max_det]
if merge and (1 < n < 3E3): # Merge NMS (boxes merged using weighted mean)
try:# update boxes as boxes(i,4) = weights(i,n) * boxes(n,4)
iou = box_iou(boxes[i], boxes) > iou_thres # iou matrix
weights = iou * scores[None] # box weights
x[i, :4] = torch.mm(weights, x[:, :4]).float() / weights.sum(1, keepdim=True) # merged boxes
if redundant:
i = i[iou.sum(1) > 1] # require redundancy
except:
print(x, i, x.shape, i.shape)
pass
# 默认输出
# output[xi] = x[i]
# 继续对结果后处理,提升低阈值下性能(0.4)
# 用于推理,降低框的重叠
# 建议训练过程注释掉681-693 会大大降低val速度
tmpx = x[i]
# 同类别框相互包裹,去除低置信度,减少误检
boxes, scores = tmpx[:, :4], tmpx[:, 4]
ioumin = box_iou_min(boxes, boxes)
cles = tmpx[:, -1]
for class1 in range(len(cles)):
for class2 in range(len(cles)):
if scores[class1]>0.1 and scores[class2]>0.1 and class1 != class2 and cles[class1] == cles[class2] and ioumin[class1][class2] >0.85:
# if scores[class1] > 0.1 and scores[class2] > 0.1 and class1 != class2 and ioumin[class1][class2] > 0.85:
if scores[class2] > scores[class1]:
scores[class1] = 0
else:
scores[class2] = 0
output[xi] = tmpx[scores>0.1] #outputs
return output
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
修改test.py
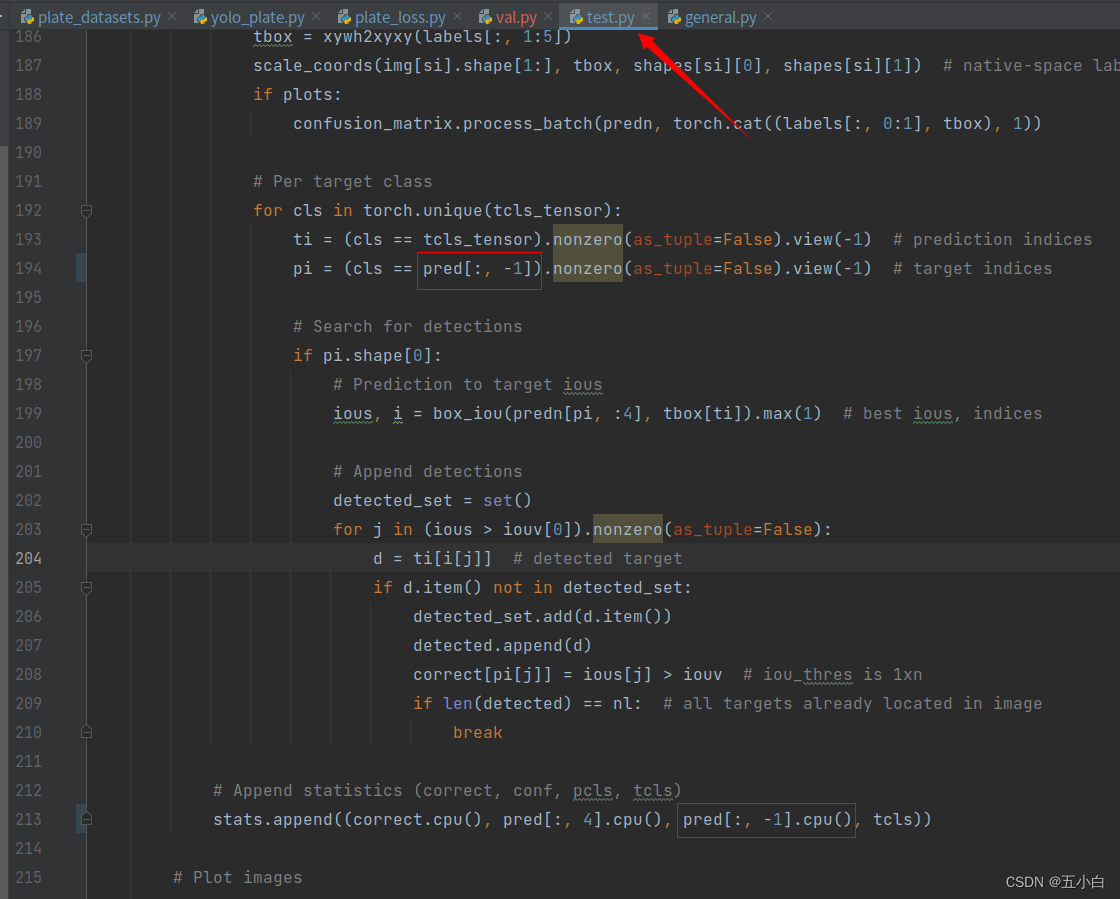
正常情况应该是不会报错,都修改完毕了~
大家可以实际动手试试,如果有问题后台私聊我哟~
后面代码整理好了,会把链接更新上来。
参考代码
yolov5-car-plate :单分类+4个点输出 ,https://github.com/xialuxi/yolov5-car-plate
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/97805
推荐阅读
相关标签

