
热门标签
热门文章
- 1String中null变为"null"字符串的问题_将string中的null转为“”
- 2【高效能人士的七个习惯】 第二部分 个人的成功:从依赖到独立(史蒂芬·柯维)...
- 3【Java基础】对比Vector、ArrayList、LinkedList有何区别?_java vector与数组的区别
- 4ubuntu 如何使用阿里云盘_ubunut 如何挂载阿里云盘
- 5caused by: java.lang.ClassNotFoundException: org.springframework.transaction.ReactiveTransactionMana
- 6【编程技术】低代码开发的入门到精通_低代码开发学习
- 7fastboot 详解_fastboot 位于 系统包 那个位置
- 8Android 获取签名公钥 和 公钥私钥加解密_android 获取app 公钥 数字格式
- 9效率神器,边看网页边问ChatGPT!神级ChatGPT插件(浏览器扩展)推荐!_sider 原理
- 10反编译微信小程序,可导出uniapp或taro项目_微信小程序反编译uniapp
当前位置: article > 正文
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例_fanuc机器人怎么传数据
作者:知新_RL | 2024-04-09 15:25:47
赞
踩
fanuc机器人怎么传数据
FANUC机器人通过KAREL程序实现与PLC位置坐标通信的具体方法示例

| 在通信IO点位数量足够的情况下,可以使用机器人的IO点传输位置数据,这里以传输机器人的实时位置为例进行说明。 |
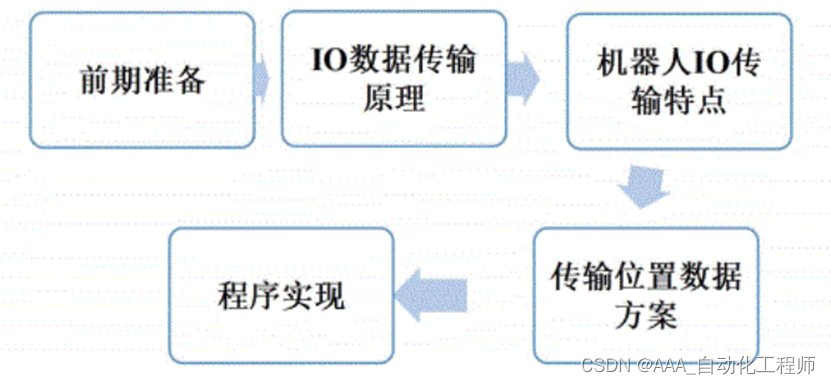
基本流程如下图所示:
| 基本步骤可参考如下: |
- 首先确认机器人控制柜已经安装了总线通信软件(例如:PROFINET),相应的IO端口通信配置已经完成,已经配置相应的GI和GO,GI用于机器人数据输入,GO用于机器人数据输出。
- 了解计算机中数据传输的原理
计算机通讯中数据是以补码的形式进行传输的。正数和零的补码与原码相同。负数的补码是将其原码除符号位之外的所有位取反,然后再加1。以8位二进制数为例进行说明:+9的原码是00001001,补码也是00001001;-9的原码是10001001,补码是11110110再加1,即11110111。 - FANUC机器人与PLC数据传输的特点
如果数据不是整数,则需要乘以一定的倍数,将小数转换成整数。机器人通过GI/GO传输数据
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/知新_RL/article/detail/393621
推荐阅读

相关标签

