- 1uniapp开发微信小程序-5.用户授权登录和用户信息获取_uniapp获取微信用户信息
- 2动手学深度学习(Pytorch版)代码实践 -深度学习基础-09过拟合与欠拟合
- 3初阶数据结构1_public int rank;
- 4为了追到小姐姐,我用 Python 制作了一个机器人
- 52023年湖北高考作文AI写_湖北拥有农产品资源ai续写
- 6Python 用 py7zr压缩文件_pyhton py7zr archive.write 把路径也压缩进去了
- 7【脚本工具】Python暴力破解ZIP文件_脚本破译工具
- 8MATLAB算法实战应用案例精讲-【深度学习】预训练模型-Transformer_matlab 使用transformer进行深度学习
- 9【AI速递】OPENAI的GPT-4 升级为GPT-4 Turbo了!_是gpt4-turbo能创建gpts还是gpt4能创建
- 10解决 Docker pull 速度慢,出现的 error pulling image configuration 后面为i/o timeout_docker pull io timeout
自己部署FAST LIO2操作记录 20220912_fast lio2 nx部署
赞
踩
自己部署FAST LIO2操作记录,在笔记本Ubuntu上。
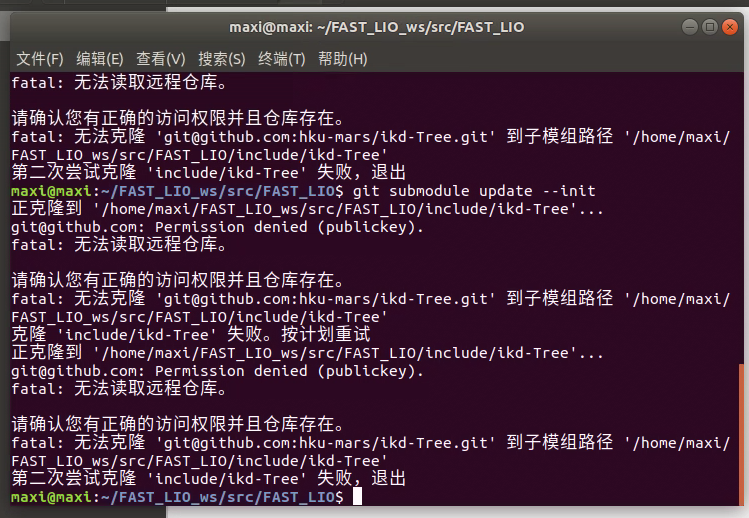
更新子模块这步会失败
似乎还需要装好livox的功能包,应该是FAST LIO2编译的时候会用到里面的一些东西应该。 https://gitee.com/maxibooksiyi/FAST_LIO
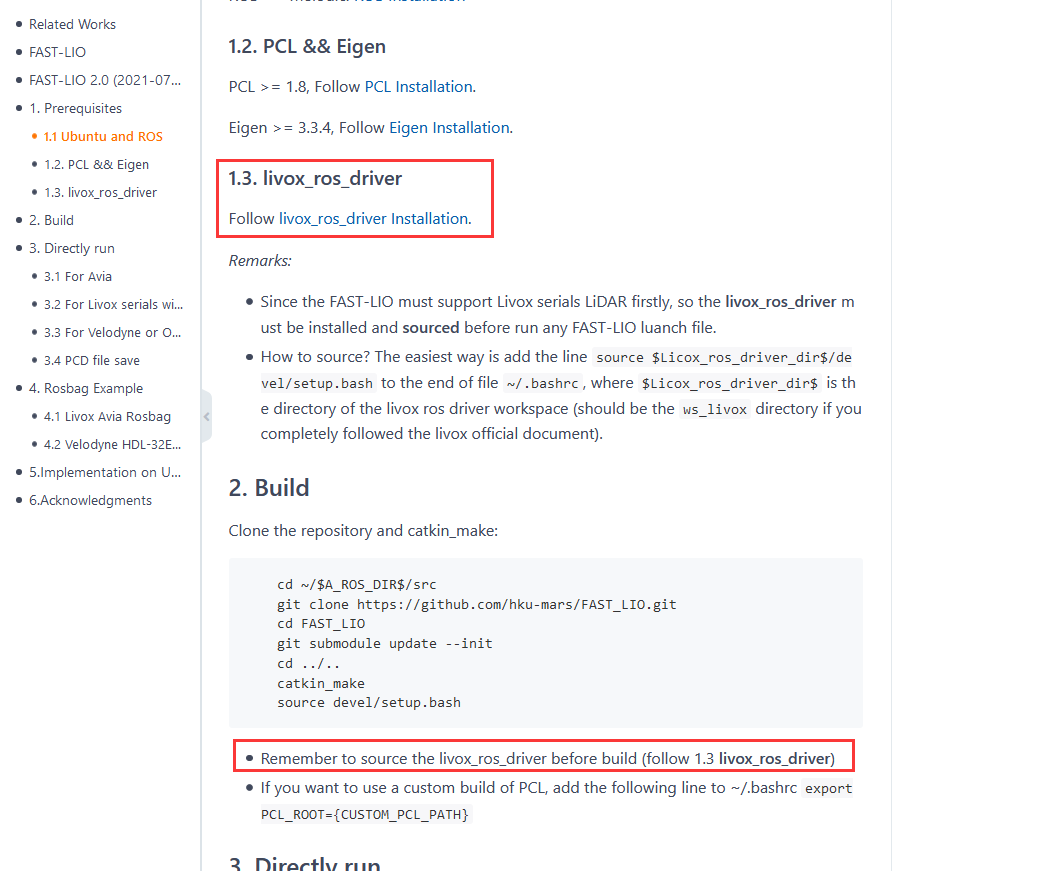
先装livox的sdk,步骤就按照官方github的readme 来的,没有问题,也跟普通C++库的安装方法一样 GitHub - Livox-SDK/Livox-SDK: Drivers for receiving LiDAR data and more, support Lidar Mid-40, Mid-70, Tele-15, Horizon, Avia.
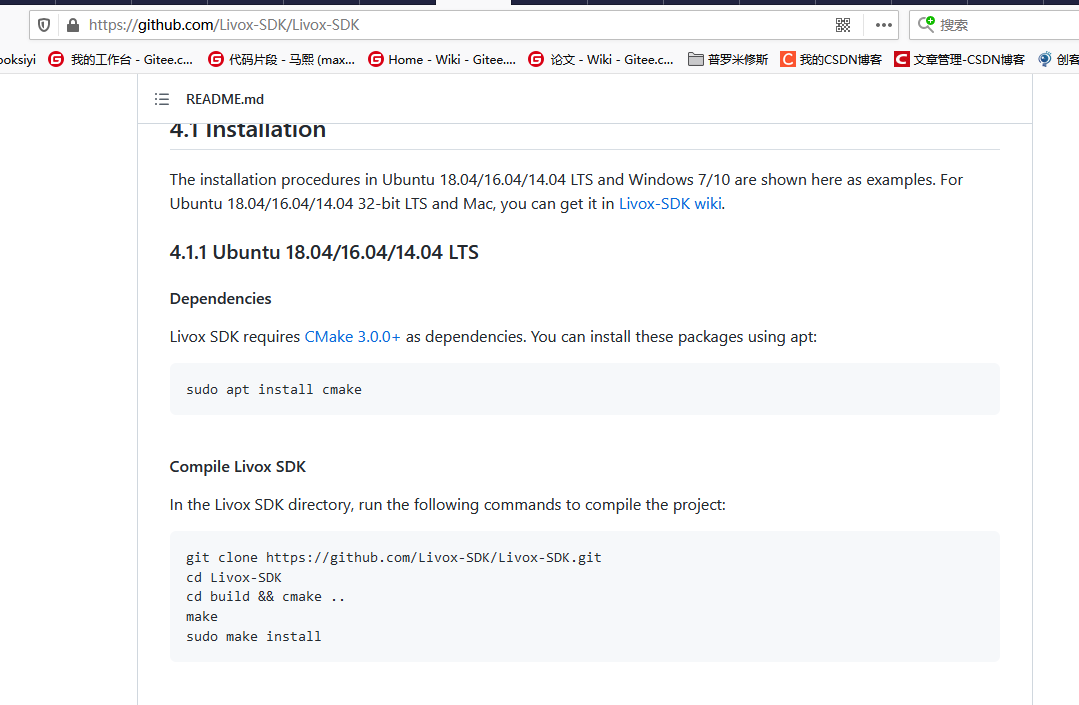
git clone https://github.com/Livox-SDK/Livox-SDK.git cd Livox-SDK cd build && cmake .. make sudo make install

再装对应功能包,克隆到一个工作空间的src文件夹下,直接catkin_make就编译通过了,我这里放到和FASR_LIO2一个工作空间里面了,估计会有什么调用,不在一个工作空间也可以,得source一下
https://gitee.com/maxibooksiyi/livox_ros_driver.git
然后下FAST_LIO2
把FAST_LIO功能包下到和livox_ros_driver同一个工作空间的src文件夹下
git clone https://gitee.com/maxibooksiyi/FAST_LIO.git
然后需要更新子模块,因为踩过坑又看了别人的博客也是这样,直接更新子模块下不下来,说没有权限,直接把对应文件夹克隆到对应仓库下面。注意克隆下来也不是直接放,有注意点,下面有说。
https://gitee.com/maxibooksiyi/ikd-Tree.git
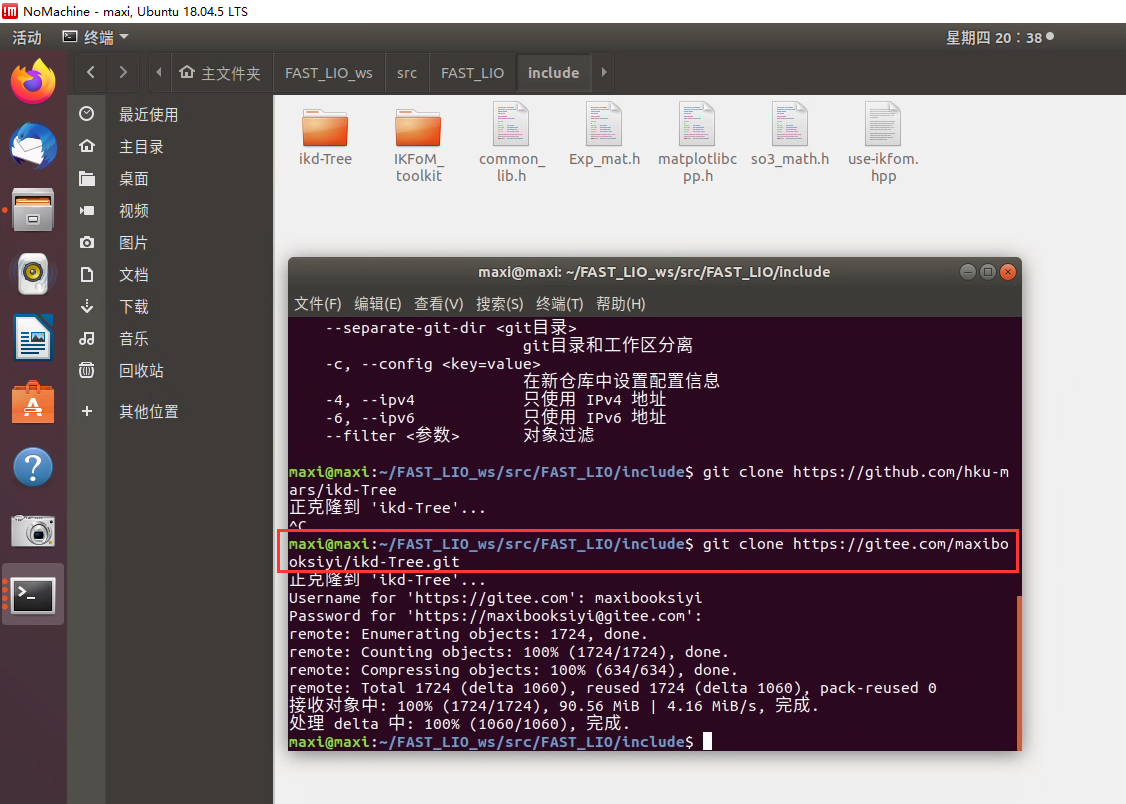
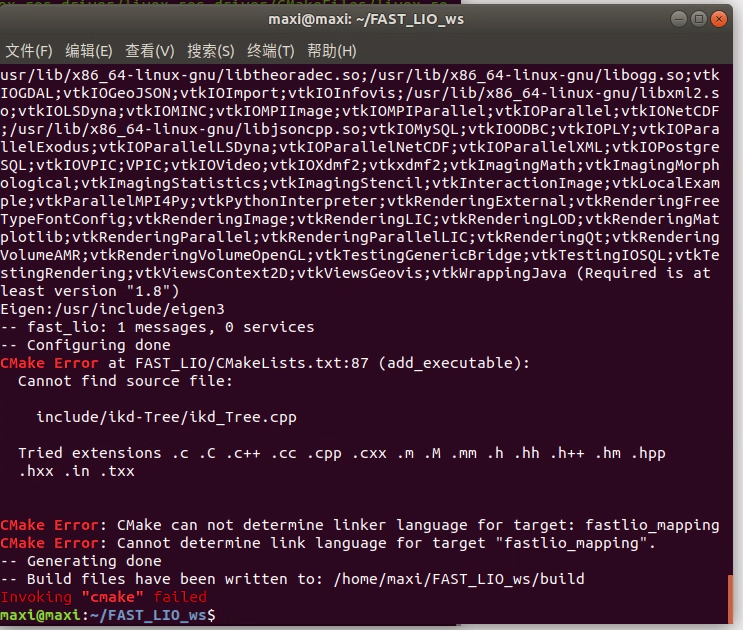
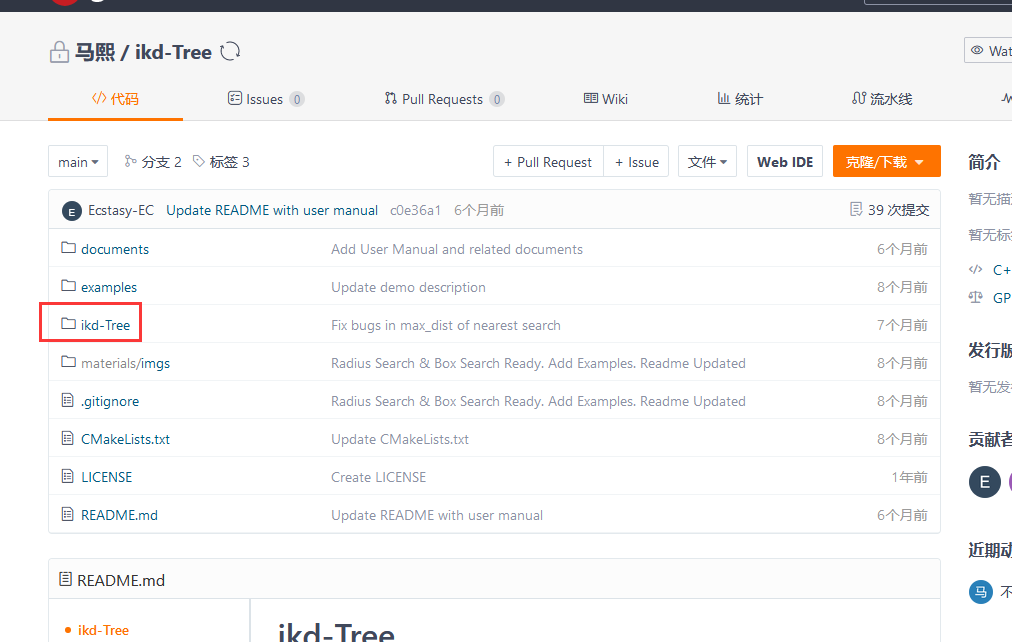
这个idK-Tree需要注意,是把idK-Tree仓库里面的idK-Tree文件夹放到FAST_LIO的include文件夹下面,不是直接把整个idK-Tree仓库放到FAST_LIO的include文件夹下面,否则catkin_make的时候会报找不到源文件的错误
最后catkin_make也比较快编译完了,我感觉激光SLAM是不是不用opencv相比于视觉SLAM少些环境上的问题?
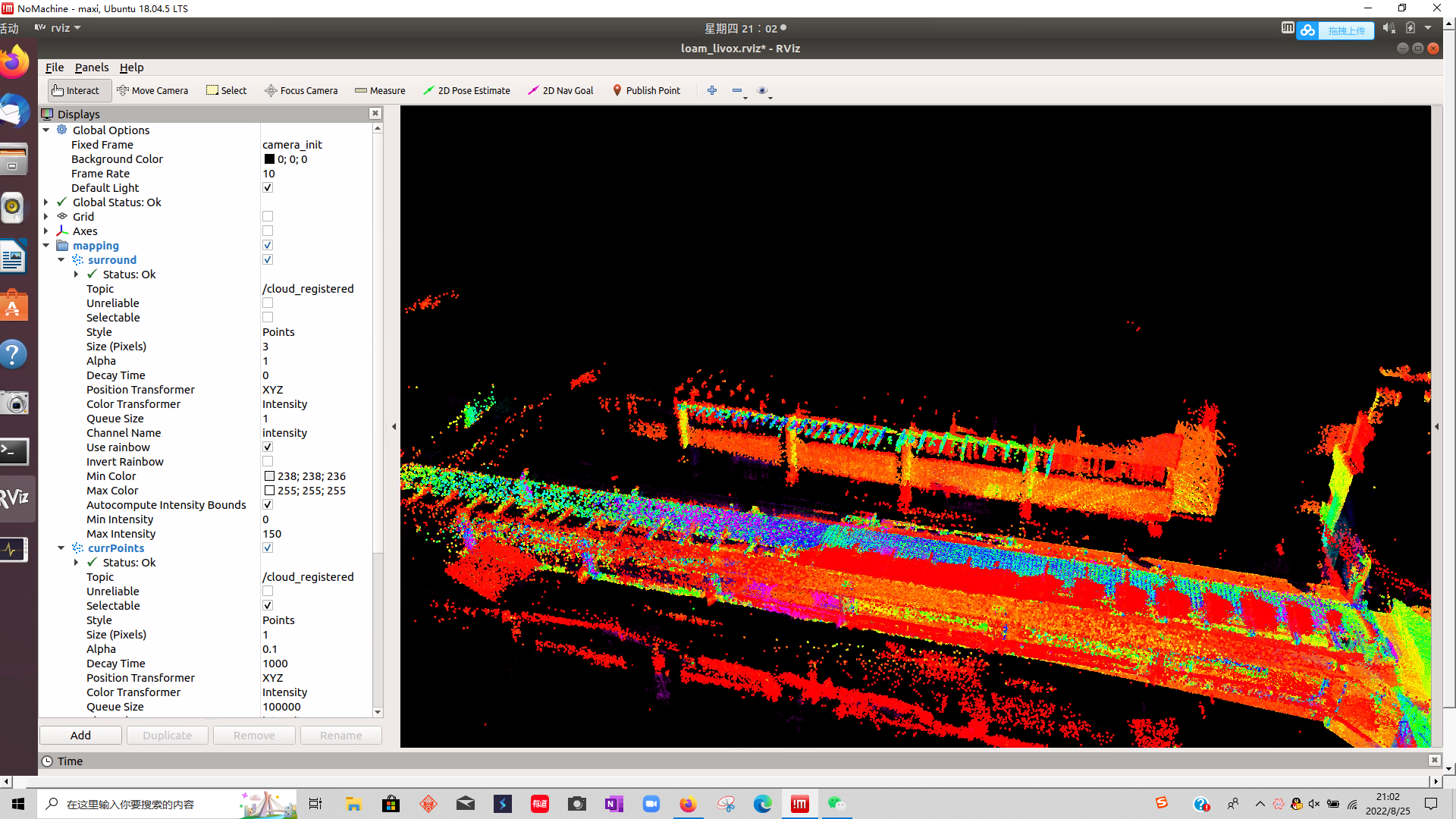
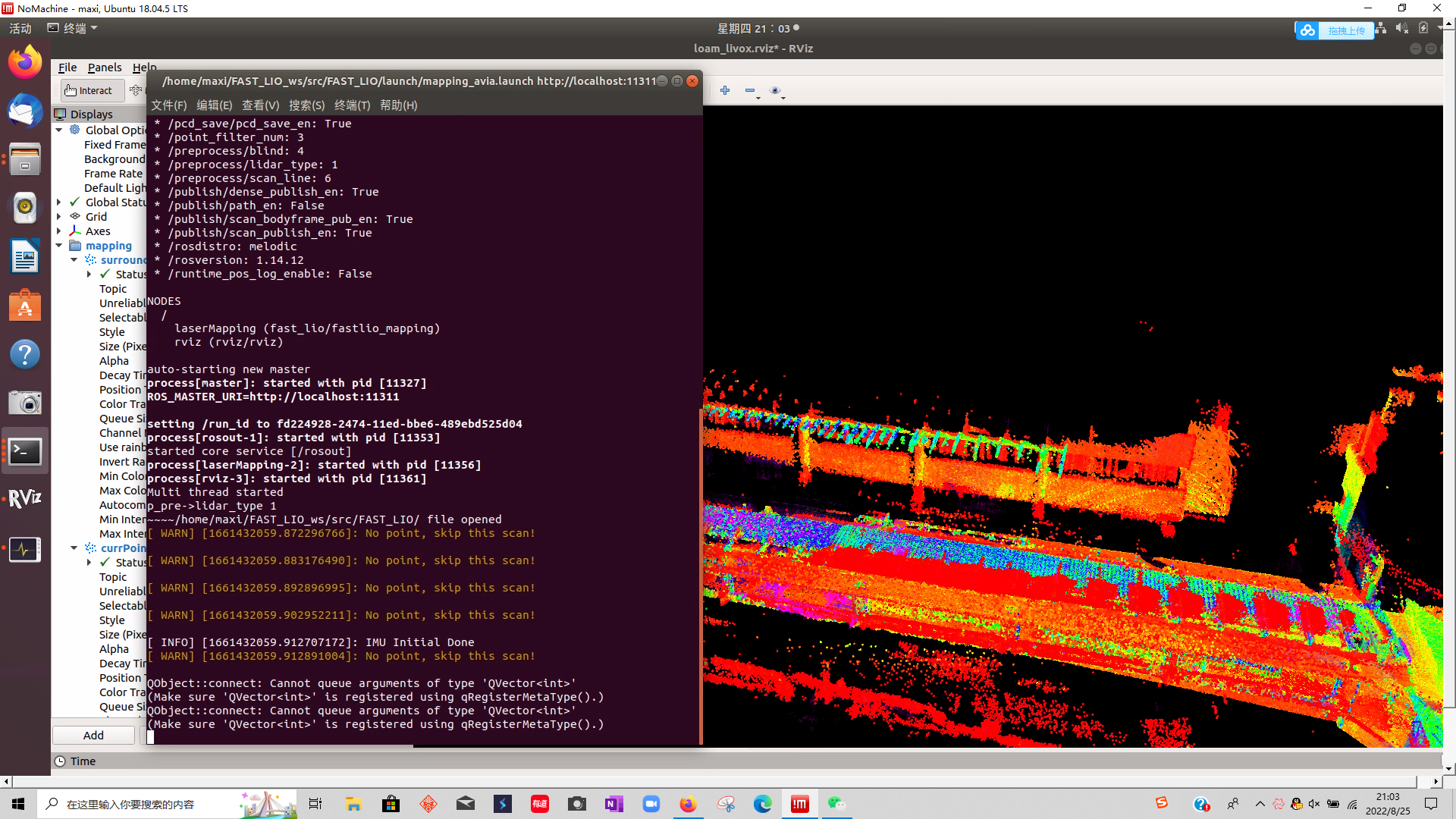
FAST_LIO2跑起来了,感觉很爽!!!! 就运行了两个命令
roslaunch fast_lio mapping_avia.launch rosbag play YOUR_DOWNLOADED.bag
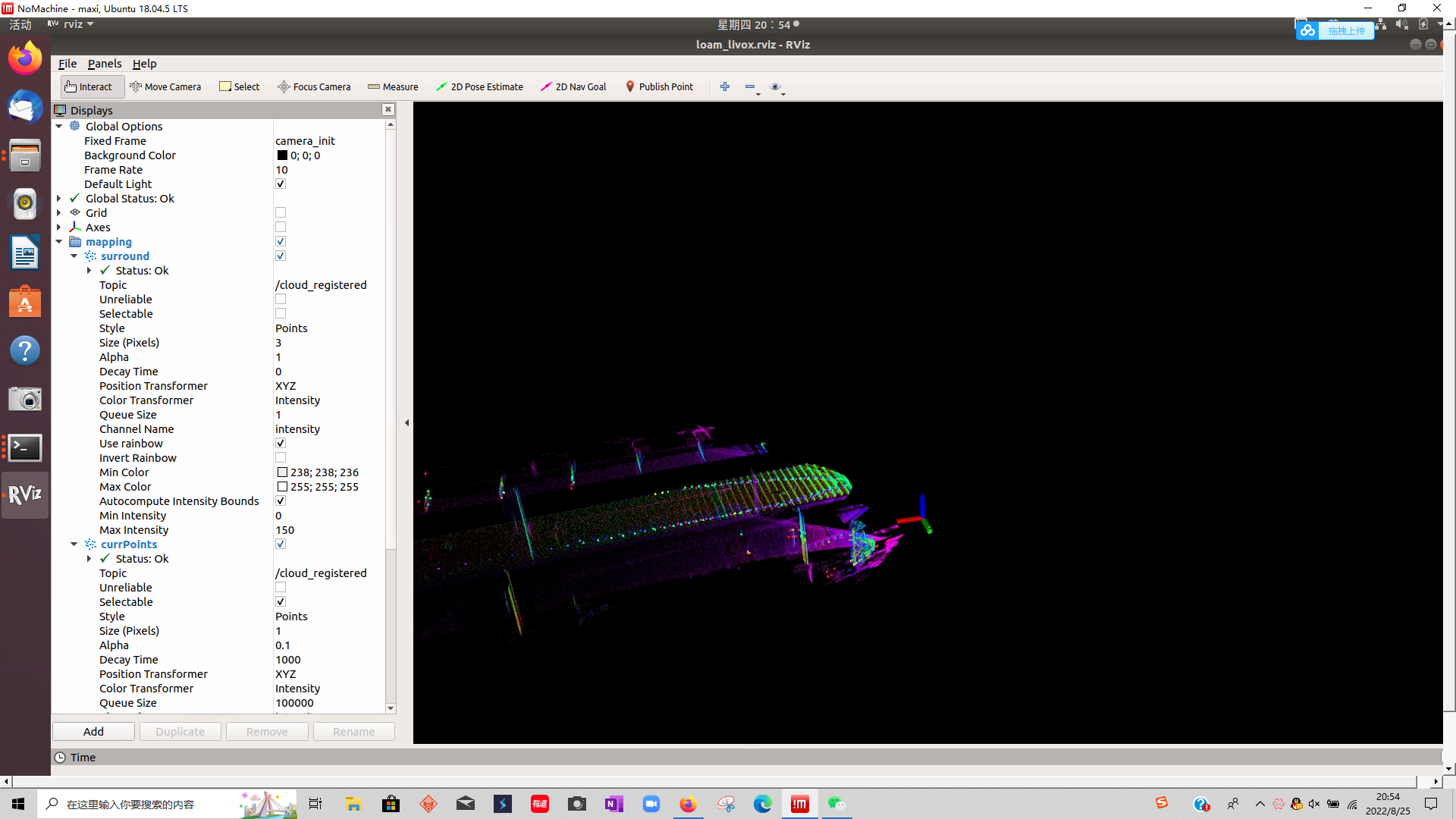
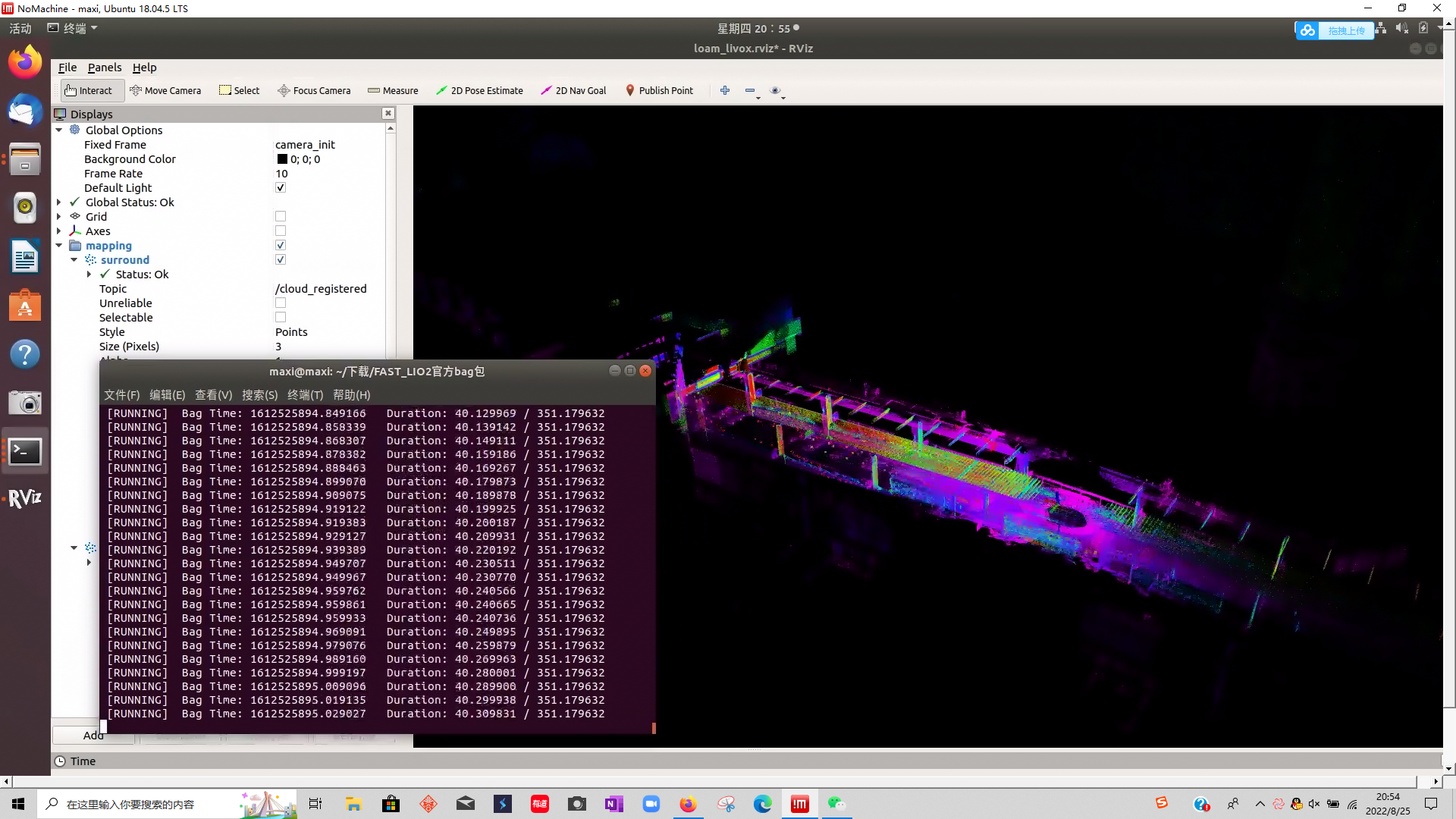
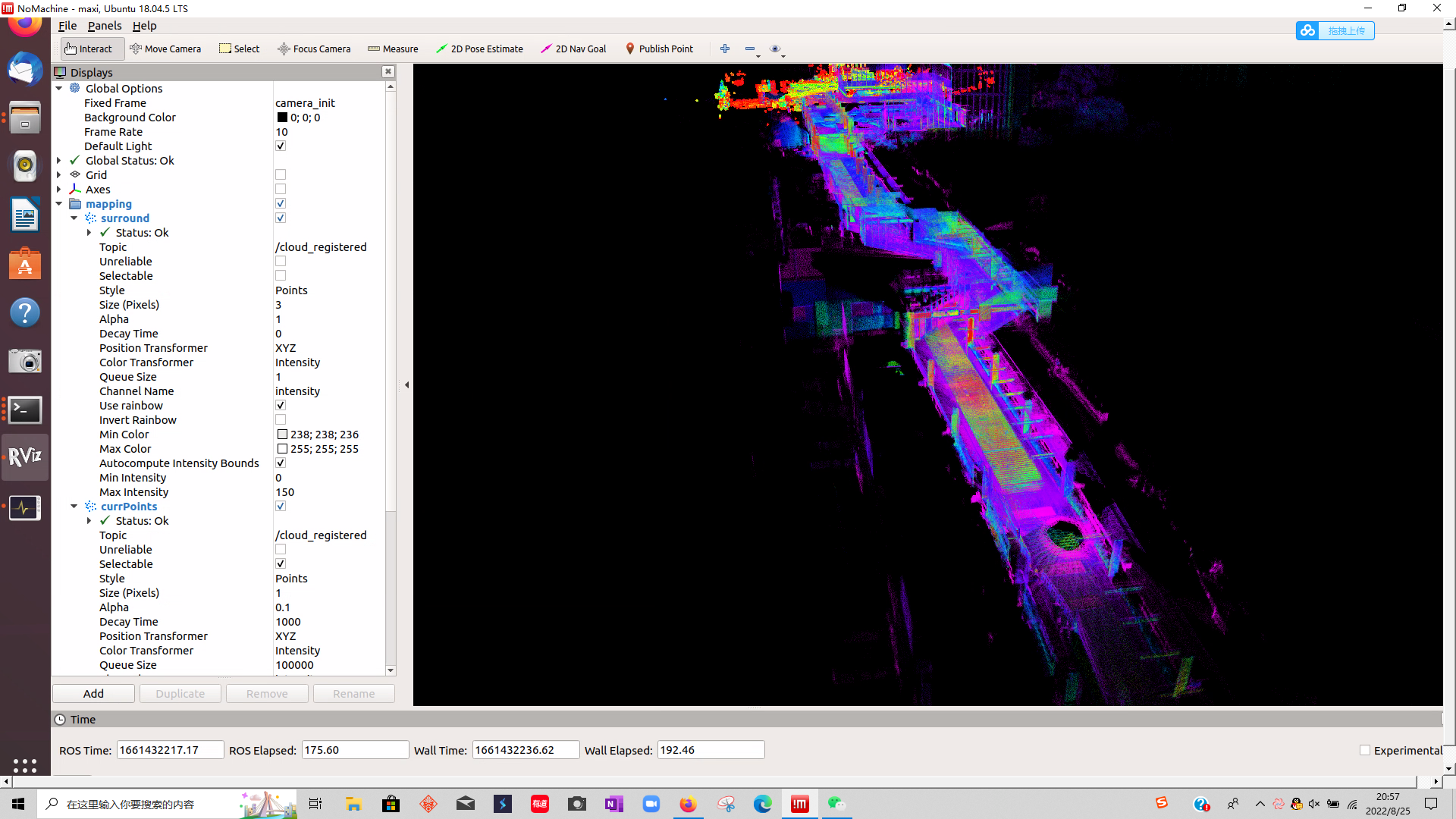
感觉电脑变得有点卡,主要是rviz变得很卡,可能是rviz的点云太多了

rostopic echo /Odometry
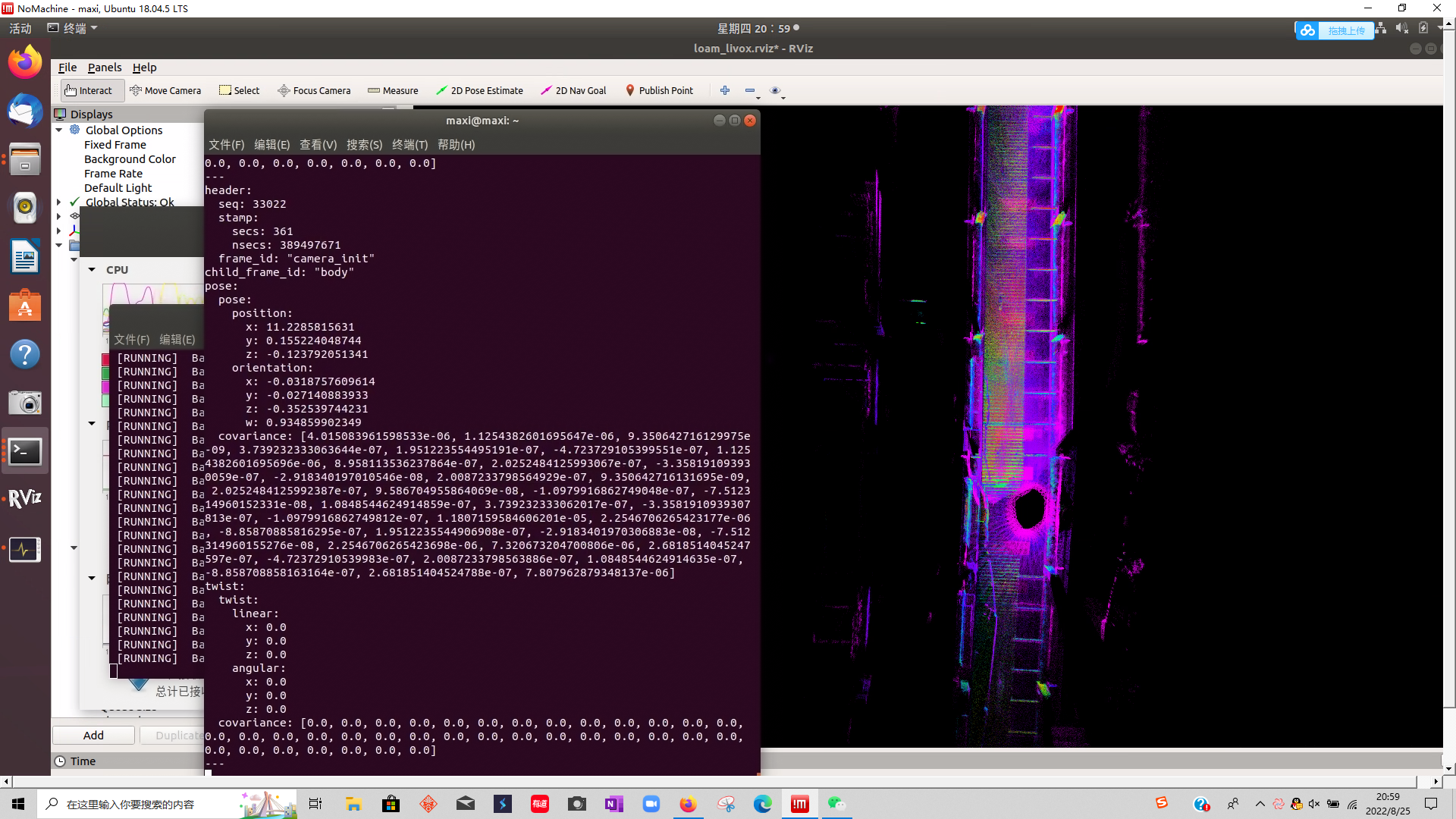
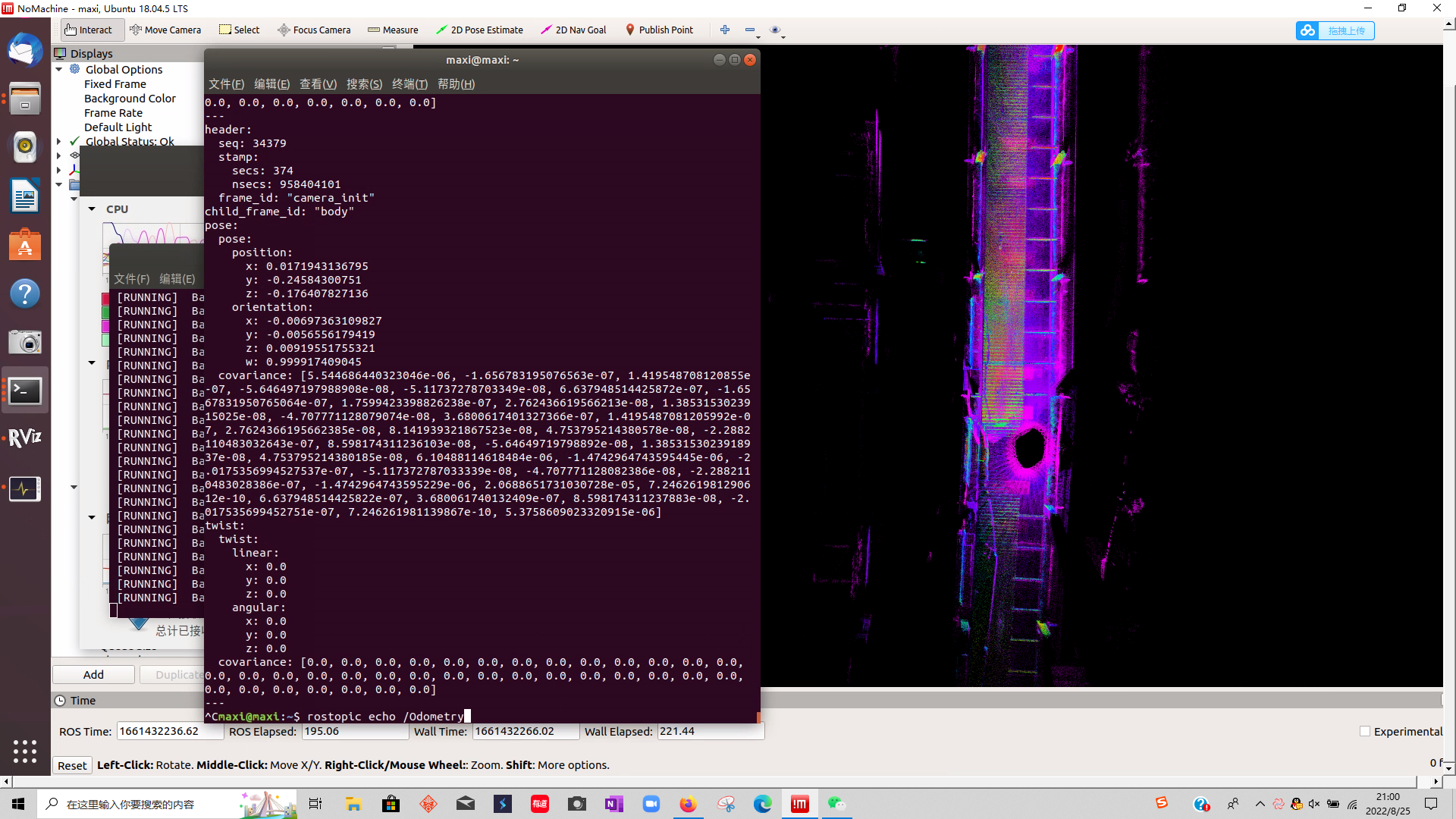
启动mapping_avia.launch的终端打印
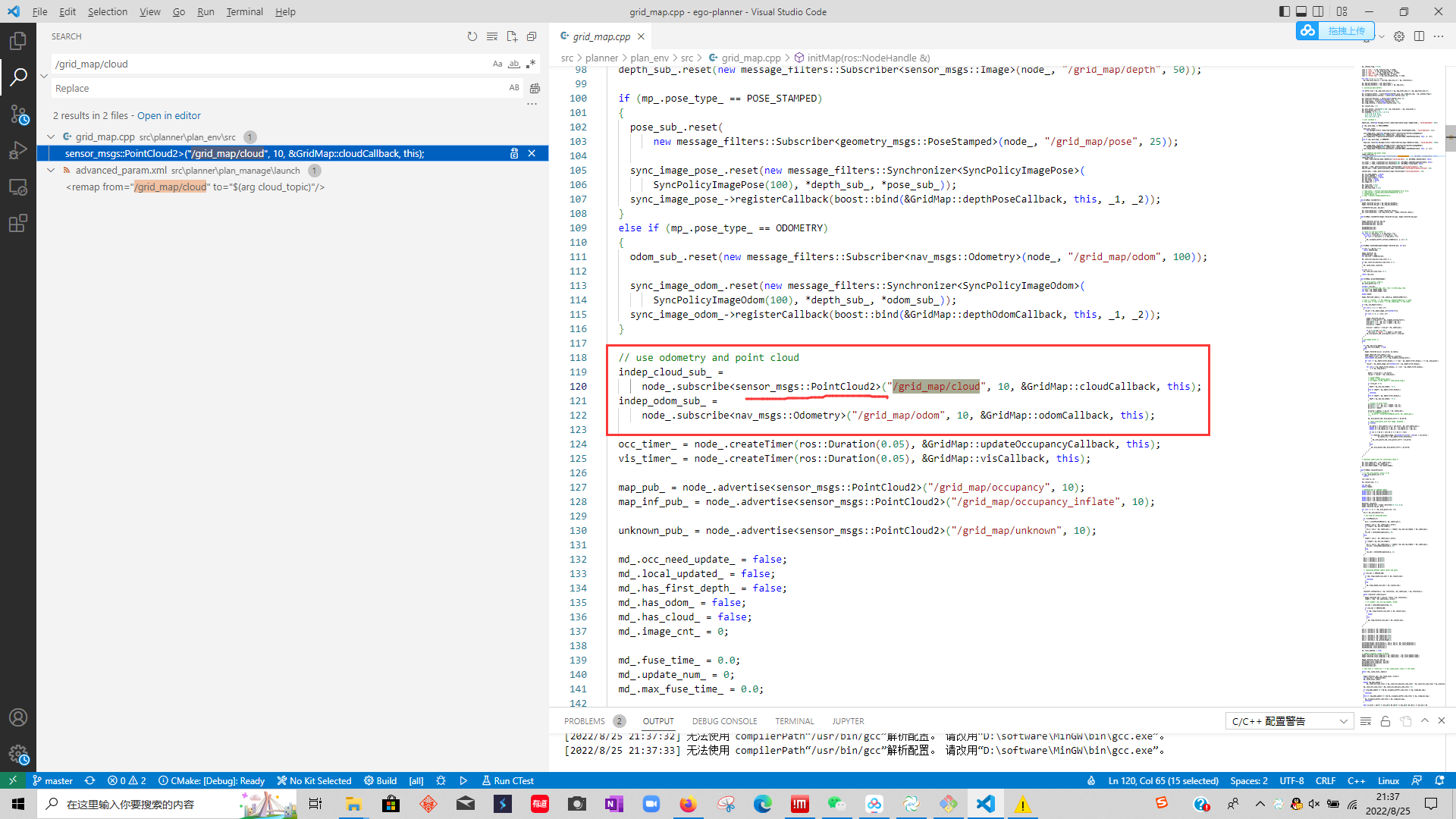
在ego-planner的代码里可以找到,订阅的激光点云话题是这个类型的 sensor_msgs::PointCloud2
这是当时跑的bag包