
- 1LeetCode刷题笔记 - 175.Combine Two Tables_自然联结描述正确的是排除多次出现
- 2此应用与最新版本的Android不兼容。在安卓 14 中_此应用与最新版android不兼容
- 3(十一)openstack------块存储服务cinder,磁盘(卷)扩容,使用 NFS---后端存储_怎么利用控制节点的空磁盘,给默认的后端存储lvm卷组扩容100g,再重启cinder服务
- 4Ollama部署中文版llama3模型_ollama部署llama3
- 5【图解算法】模板+变式——带你彻底搞懂字典树(Trie树)_trie tree
- 6MySQL操作+增删改查_mysql创建账非root账号 授权select update
- 7php环境配置 php5 mysql5 apache2 phpmyadmin安装与配置_phpmyadmin php5.2
- 8C++遍历文件夹_c++ 遍历文件夹
- 9Zookeeper集群搭建
- 10Spring boot开启定时任务的三种方式_springboot 定时任务
【FPGA】UART串口通信_fpga uart
赞
踩
前言
嵌入式电子产品是一种互连电路(处理器或其他集成电路)以创建共生系统。
为了使这些单独的电路交换其信息,它们必须共享
公共通信协议。已经定义了数百种通信协议来实现这种数据交换,并且通信的方式主要可以分为两类:
并行或串行。
这一章我们需要理解串行通信,并行通信两种方式。并理清UART串口通信的整个模块设计,然后依次编写发送模块,接收模块
一丶通信方式
1.串行通信
定义:串行通信是指利用一条传输线将数据一位位地顺序传送。(也就是说串行通信传输的数据是1比特1比特的传送的)
串行通信又称为点对点通信,对于点对点之间的通信
根据数据的同步方式,又分为 异步通信 和 同步通信 两种方式
根据数据的传输方向与时间关系,又可分为:①单工通信、②半双工通信及③全双工通信三种方式。
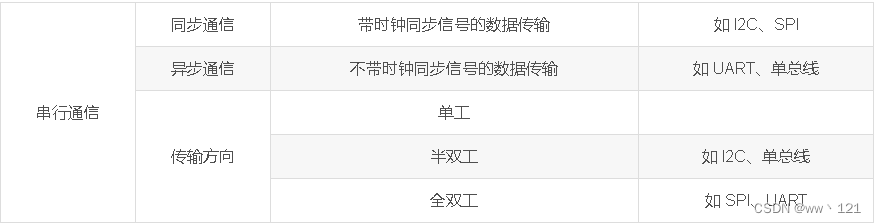
1.同步通信
同步通信一般有一个同步时钟,如下图,一根数据线,一根时钟线。一个时钟传输一个Bit位。

2.异步通信
异步通信中,在异步通信中有两个比较重要的指标:字符帧格式和波特率。
数据通常以字符或者字节为单位组成字符帧传送,是通过双方约定好的波特率进行数据传输。
假如双方波特率不一致,则接收到数据就是乱码。

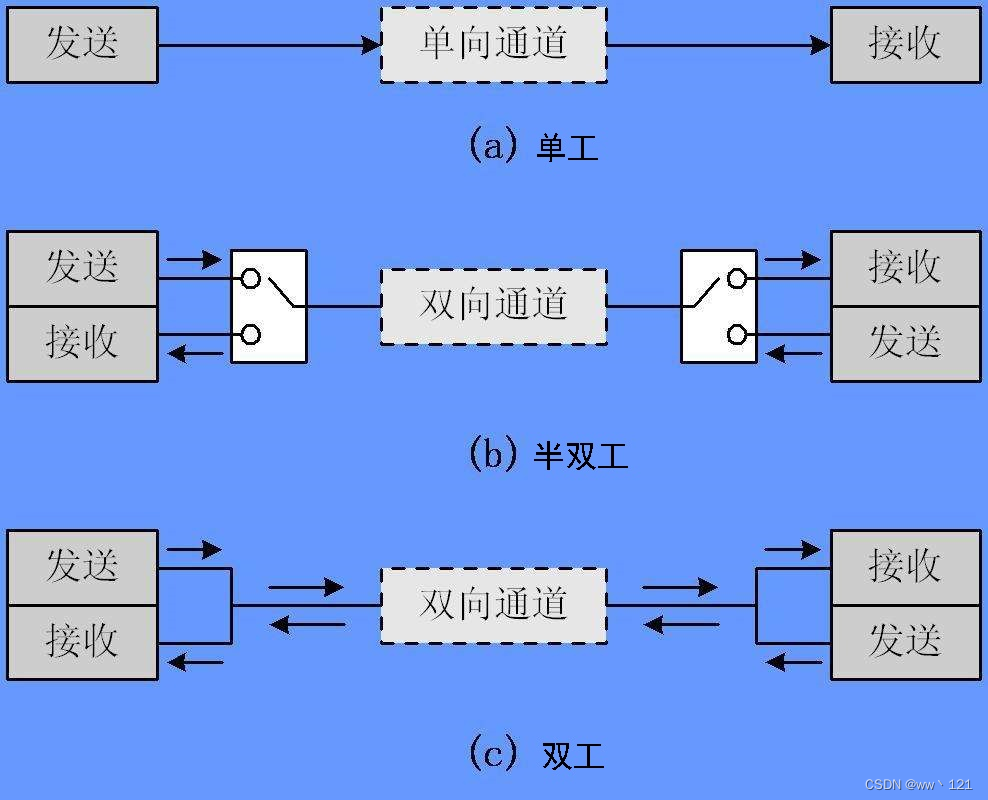
单工:
只允许数据按照一个固定的方向传送,在任何时刻都只能进行一个方向的通信,一个设备固定为发送设备,一个设备固定为接收设备。
半双工:
两个设备之间可以收发数据,但是不能在同一时刻进行,每次只能有一个设备发送,另一个站接收。
全双工:
在同一时刻,两个设备之间可以同时进行发送和接收数据。
2.并行通信
并行是指多比特数据同时通过并行线进行传送,这样数据传送速度大大提高。
但并行传送的线路长度受到限制,因为长度增加,干扰就会增加,数据也就容易出错。
并行接口同时传输多个位。它们通常需要数据总线(八、十六或更多线路),以1和0的波形传输数据。
如下图:使用9线的并行通信,由时钟控制的8位数据总线,每个时钟脉冲发送一个字节。

二丶UART 串口通信
它是全双工的异步通信。
串口通信的信号线需要两条线完成,TX和RX TX发送端 RX为接收端
它的协议主要由四部分组成
- 起始位(1 bit)
- 数据位(6/7/8 bit)
- 奇偶校验位(1 bit)
- 停止位(1 bit)
原理图如下:
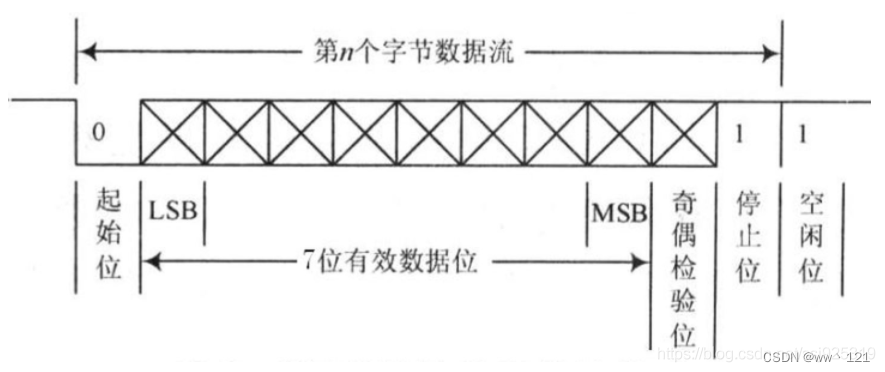
注意:此原理图既作为接收的数据帧,也作为发送的数据帧。因为串行通信中,在数据线上传输的数据是一位一位的,所以在收发数据的时候要进行串并之间的转换
收发流程:
- 发送:首先是
空闲状态,线路处于高电位;当收到发送数据指令后,拉低线路一个数据位的时间T1,接着数据按低位到高位依次发送,数据发送完毕后,接着发送奇偶校验位和停止位(停止位为高电位),一帧数据发送结束。 - 接收:首先是
空闲状态,线路处于高电位;当检测到线路的下降沿(线路电位由高电位变为低电位)时说明线路有数据传输,按照约定的波特率从低位到高位接收数据,数据接收完毕后,接着接收并比较奇偶校验位是否正确,如果正确则通知后续设备准备接收数据或存入缓存,最后接收到停止位(停止位为高电位),一帧数据接收结束。
三丶模块设计
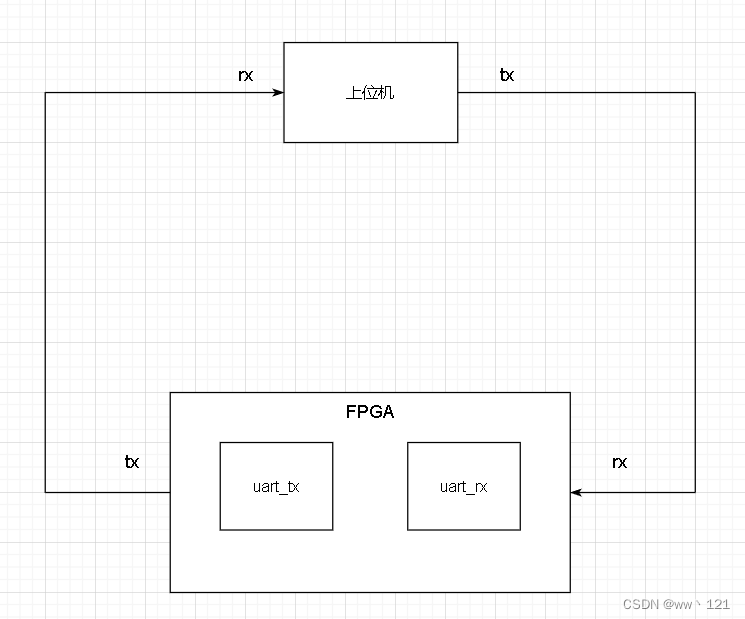
- rx为接收端口
- tx为发送端口
上图所示分为主机和从机
我们把FPGA当作从机,来接收上位机(也就是我们的PC)发送过来的数据,再把数据发送给上位机,内部就需要两个模块 uart_rx和uart_tx
uart_rx:
串口接收模块从 rx 接收到数据后,在内部实现接收方法,接收完毕后将数据进行串转并,然后发送给控制模块
uart_tx:
串口发送模块接收到uart_rx模块传来的数据,将数据进行并转串,通过tx端口发送出去
四丶发送模块
1.代码
uart_tx.v
module uart_tx ( input wire clk, input wire rst_n, input wire [7:0] din, input wire din_vld, output reg tx ); //定义一个寄存器来锁存 din_vld 时的din reg [9:0] data; //波特率计数器 reg [8:0] cnt_bps; wire add_cnt_bps; wire end_cnt_bps; //比特计数器 reg [4:0] cnt_bit; wire add_cnt_bit; wire end_cnt_bit; reg flag; //计数器开启标志位 parameter BPS_115200=434; //发送一bit数据需要的周期数 //data always @(posedge clk or negedge rst_n) begin if (!rst_n) begin data<=0; end else if(din_vld) begin data<={1'b1,din,1'b0}; //拼接起始位和停止位 end else data<=data; end //发送数据 tx always @(posedge clk or negedge rst_n) begin if (!rst_n) begin tx<=1'b1; end else if(cnt_bps==1) begin tx<=data[cnt_bit]; end end //flag always @(posedge clk or negedge rst_n) begin if (!rst_n) begin flag<=0; end else if(din_vld) begin flag<=1; end else if(end_cnt_bit) begin //发送完成关闭计数器 flag<=0; end else flag<=flag; end //cnt_bps always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_bps<=0; end else if(add_cnt_bps) begin if (end_cnt_bps) begin cnt_bps<=0; end else cnt_bps<=cnt_bps+1; end end assign add_cnt_bps=flag; assign end_cnt_bps=add_cnt_bps&&cnt_bps==BPS_115200-1; //cnt_bit always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_bit<=0; end else if(add_cnt_bit) begin if (end_cnt_bit) begin cnt_bit<=0; end else cnt_bit<=cnt_bit+1; end end assign add_cnt_bit=end_cnt_bps; assign end_cnt_bit=add_cnt_bit&&cnt_bit==9; endmodule //uart_tx

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
2.仿真
testbench
`timescale 1ns/1ns module tb_uart_tx (); reg clk; reg rst_n; reg [7:0] din; reg din_vld; wire tx; parameter CYCLE=20; uart_tx uart_tx( .clk (clk), .rst_n (rst_n), .din (din), .din_vld (din_vld), .tx (tx) ); always #(CYCLE/2) clk=~clk; initial begin clk=1; rst_n=1; #(CYCLE*10); rst_n=0; din_vld=0; #(CYCLE*10); rst_n=1; din=8'b1001_0101; din_vld=1; #CYCLE; din_vld=0; #(CYCLE*434*12); $stop; end endmodule //tb_uart_tx
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
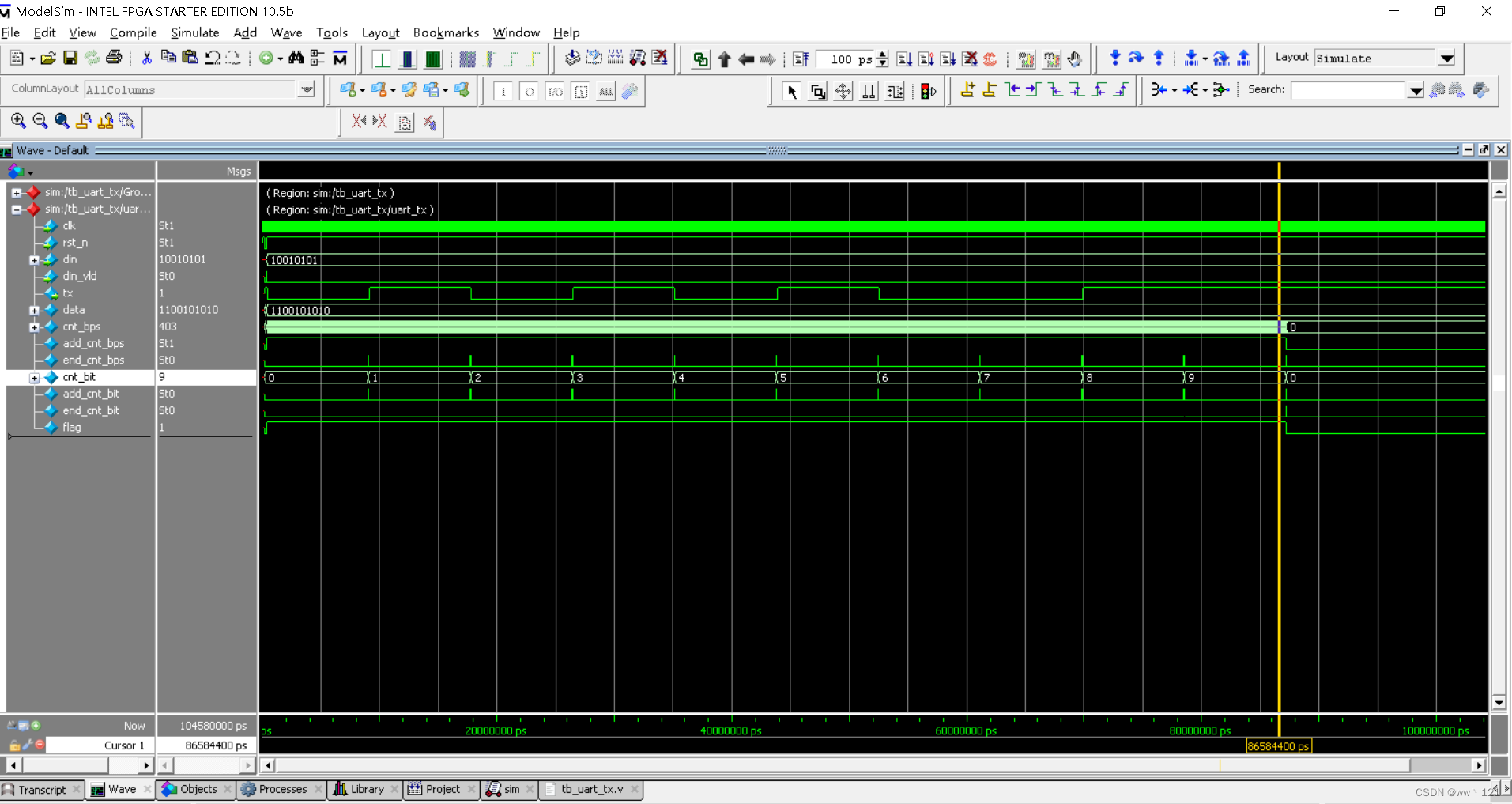
如下图所示:
一开始我们进行复位之后,用仿真模拟了uart_rx接收模块,把din(也就是本应该在uart_tx模块进行串转并)和din_vld信号给uart_tx模块,检测到din_vld拉高,data锁存住din,同时开启波特率计数器,从起始位开始发送,直到停止位
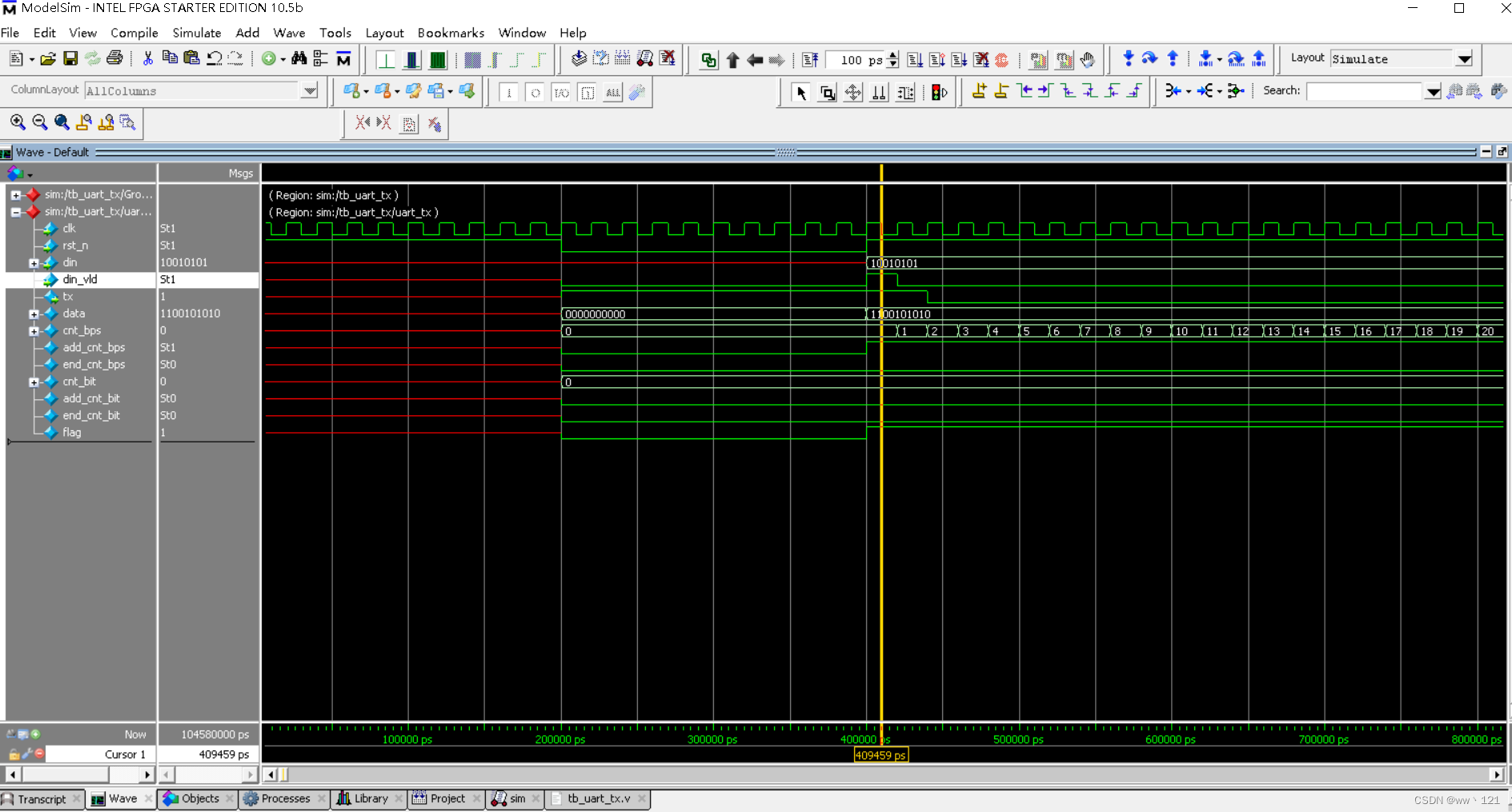
因为我们仿真文件给din赋值为8’b1001_0101,在uart_tx模块中用data拼接起始位和停止位,拼接之后的data为10位的1_1001_0101_0
仿真时序图中可以看到tx端口为0101010011,按顺序输出
五丶接收模块
1.代码
uart_rx:
module uart_rx ( input wire clk, input wire rst_n, input wire rx, output reg [7:0] dout, //由接收到的数据进行并转串输出给uart_tx模块 output reg dout_vld //接收完成标志位 ); reg flag; //rx下降沿来临flag拉高 reg [9:0] dout_r; //锁存rx接收到的数据(从起始位 到数据为 到停止位) reg rx_r0; //同步 reg rx_r1; //打拍 wire nedge; //下降沿检测 //波特率计数器 reg [8:0] cnt_bps; wire add_cnt_bps; wire end_cnt_bps; //bit计数器 reg [3:0] cnt_bit; wire add_cnt_bit; wire end_cnt_bit; parameter BPS_115200 = 434; //同步 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin rx_r0<=1; end else rx_r0<=rx; end //打拍 always @(posedge clk or negedge rst_n) begin if (!rst_n) begin rx_r1<=1; end else rx_r1<=rx_r0; end assign nedeg=~rx_r0 & rx_r1; //下降沿检测,起始位为低电平 //flag always @(posedge clk or negedge rst_n) begin if (!rst_n) begin flag<=0; end else if(nedeg) begin flag<=1; end else if(end_cnt_bit) begin flag<=0; end end //cnt_bps always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_bps<=0; end else if(add_cnt_bps) begin if (end_cnt_bps) begin cnt_bps<=0; end else cnt_bps<=cnt_bps+1; end end assign add_cnt_bps=flag; assign end_cnt_bps=add_cnt_bps&&cnt_bps==BPS_115200-1; //cnt_bit always @(posedge clk or negedge rst_n) begin if (!rst_n) begin cnt_bit<=0; end else if(add_cnt_bit) begin if (end_cnt_bit) begin cnt_bit<=0; end else cnt_bit<=cnt_bit+1; end end assign add_cnt_bit=end_cnt_bps; assign end_cnt_bit=add_cnt_bit&&cnt_bit==10 -1; //dout_r always @(posedge clk or negedge rst_n) begin if (!rst_n) begin dout_r<=0; end else if(cnt_bps==(BPS_115200>>1)) begin dout_r[cnt_bit]<=rx_r0; end end //dout always @(posedge clk or negedge rst_n) begin if (!rst_n) begin dout<=0; end else if(end_cnt_bit) begin dout<=dout_r[8:1]; //只用把数据位传给uart_tx模块,所以取中间的8位 end end //dout_vld always @(posedge clk or negedge rst_n) begin if (!rst_n) begin dout_vld<=0; end else if(end_cnt_bit) begin dout_vld<=1; //给发送模块的数据有效信号 end else dout_vld<=0; end endmodule //uart_rx
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
2.仿真
testbench
`timescale 1ns/1ns module tb_uart_rx (); reg clk; reg rst_n; reg rx; wire[7:0] dout; wire dout_vld; integer i; parameter CYCLE=20; uart_rx uart_rx( .clk (clk), .rst_n (rst_n), .dout (dout), .dout_vld (dout_vld), .rx (rx) ); always #(CYCLE/2) clk=~clk; initial begin clk=1; rst_n=1; #(CYCLE*10); rst_n=0; rx=1; #(CYCLE*10); rst_n=1; rx=0; //起始位 #(CYCLE*434); for (i = 0; i<8; i=i+1) begin #(CYCLE*434); rx={$random}%2; //产生0~1的随机数 end rx=1; //停止位 #(CYCLE*1000); $stop; end endmodule
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
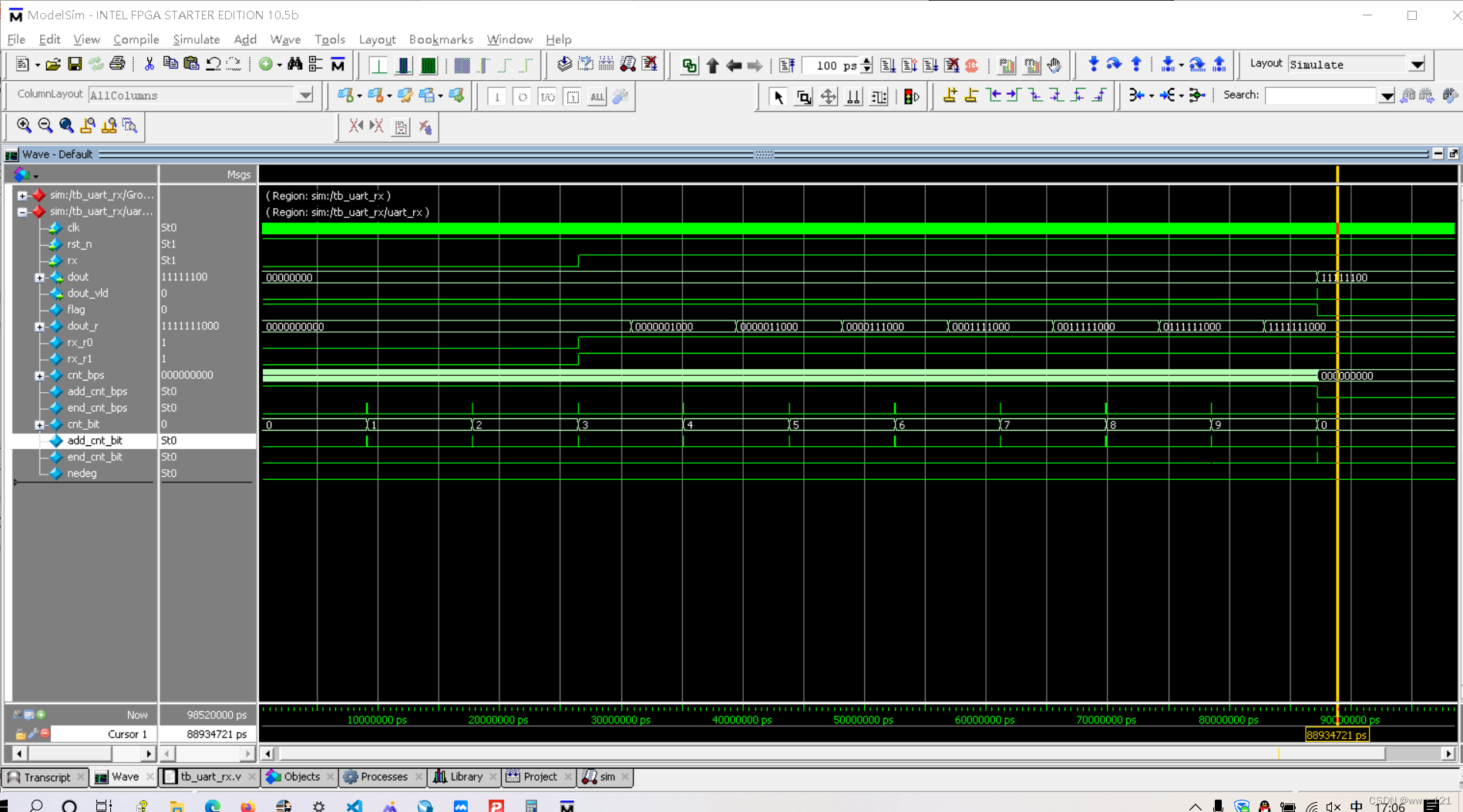
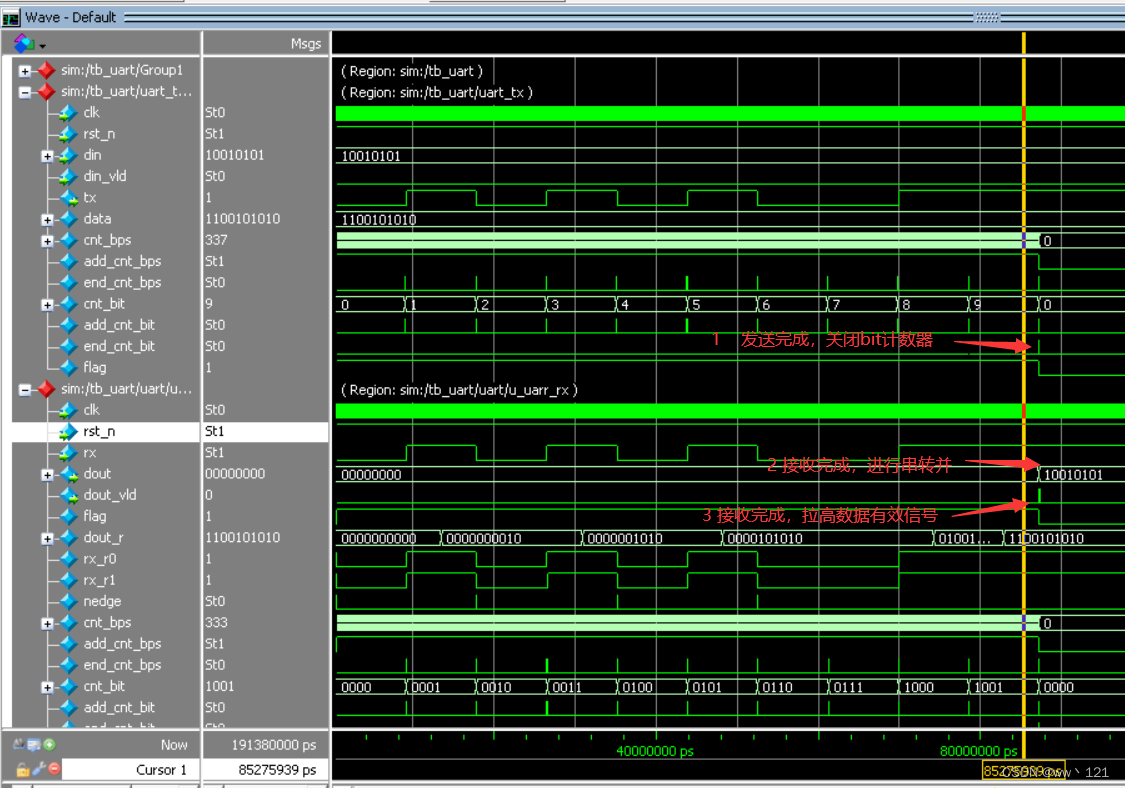
结果如下图所示:
我们在接收模块需要把接收到的串行数据转换成并行数据再传给uart_tx模块
空闲状态的时候,rx处于高电平状态,我们在仿真文件中模拟rx拉低,也就是接收到了起始位,波特率计数器(add_cnt_bps)开启
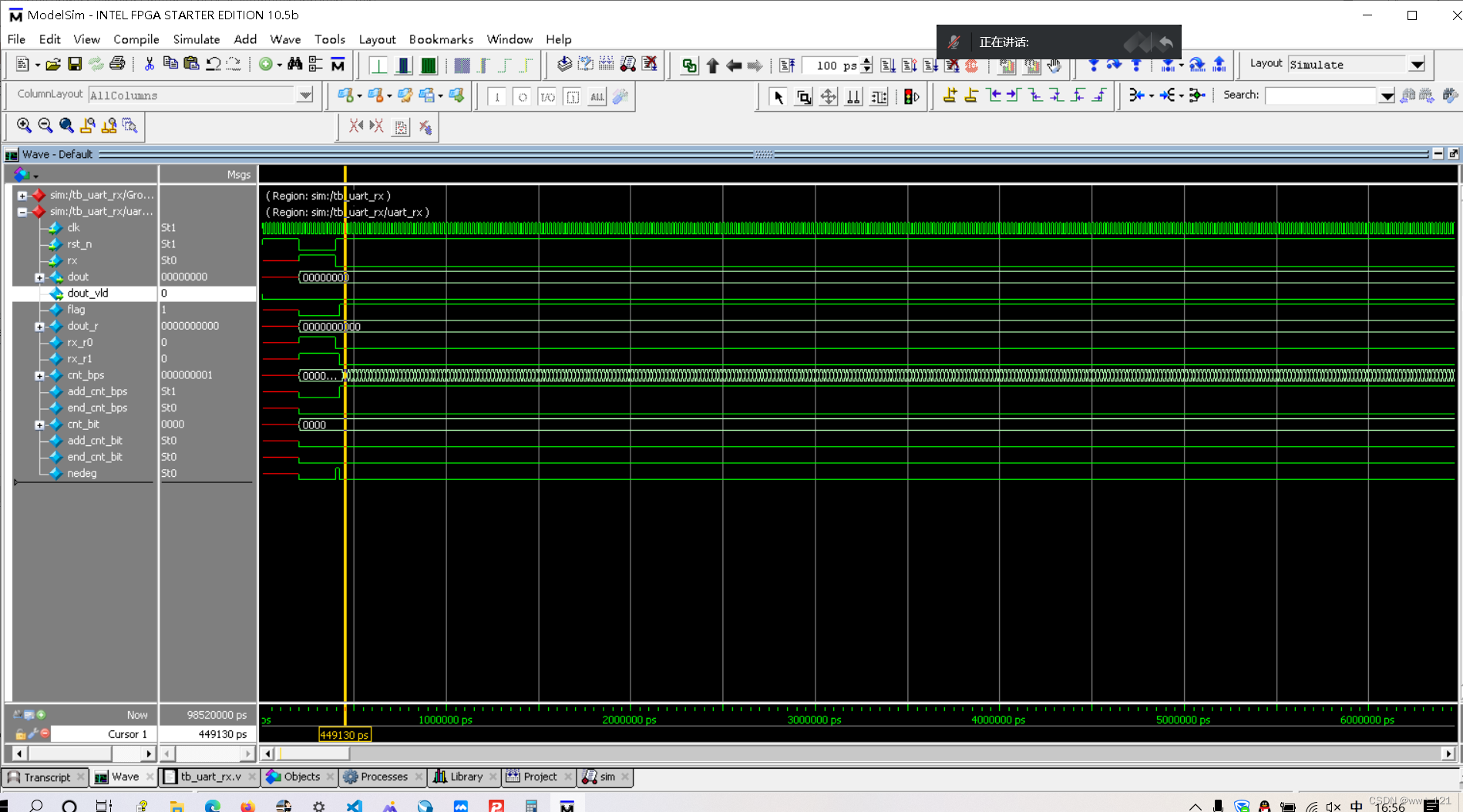 rx接收到
rx接收到停止位,也就是一共接收了10bit(1bit起始位+8bit数据位+1bit停止位),此时bit计数器拉低(end_cnt_bit),并行数据dout锁存,拉高一个周期的数据有效信号(dout_vld)
六丶顶层模块
1.代码
uart.v
module uart ( input wire clk, input wire rst_n, input wire rx, //接收 output wire tx //发送 ); wire [7:0] dout; wire dout_vld; uart_tx u_uart_tx( //将发送的并行数据转换成串行数据 .clk (clk), .rst_n (rst_n), .tx (tx), //串行数据 .din (dout), //并行数据 .din_vld (dout_vld) ); uart_rx u_uarr_rx( //将接收到的串行数据转换成并行数据 .clk (clk), .rst_n (rst_n), .rx (rx), //串行数据 .dout (dout), //并行数据 .dout_vld (dout_vld) ); endmodule //uart
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
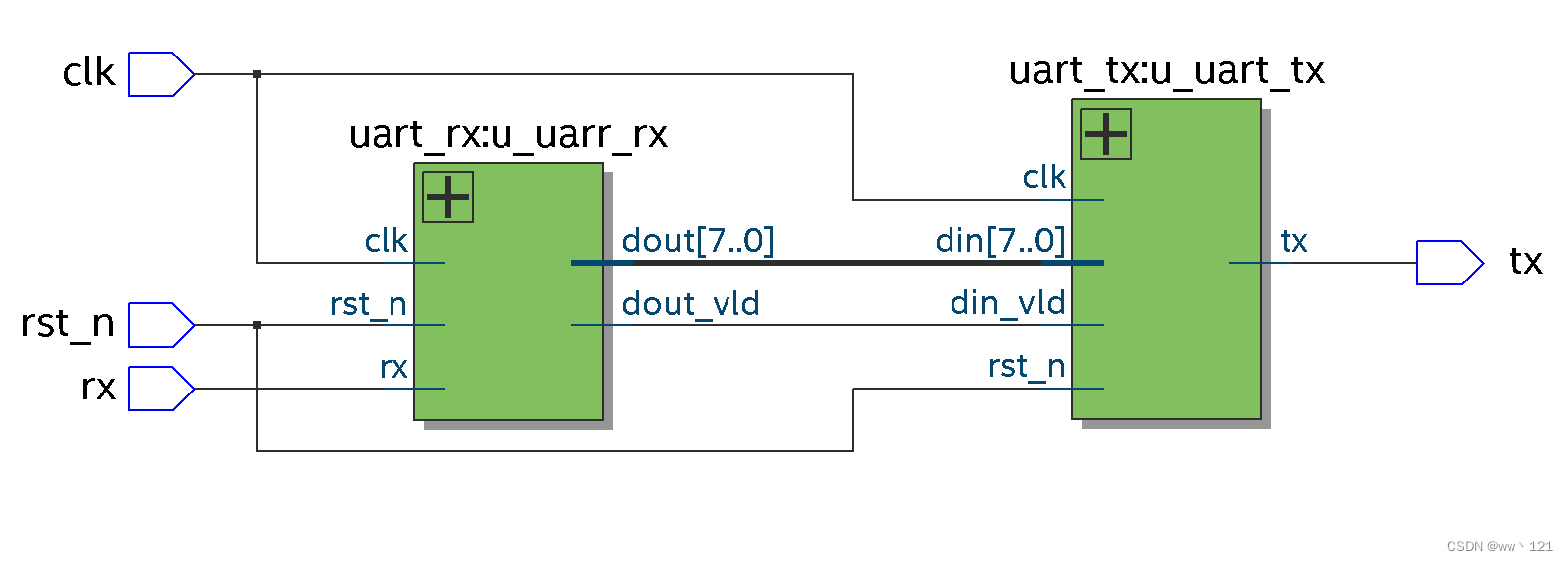
2.模块原理图
3.仿真
对于顶层的仿真,我们需要模拟出一个上位机来给我们的FPGA发送数据,
所以在例化模块的时候,我们首先例化一个uart_tx当作上位机,来给我们的从机发送数据,然后例化一个uart模块当作从机,也就是例化顶层模块
思路清晰了,进行testbench的编写
`timescale 1ns/1ns module tb_uart (); reg clk; reg rst_n; reg [7:0] din; reg din_vld; wire tx_r; //用来连接上位机的tx和从机的rx wire rx; parameter CYCLE=20; //例化从机(顶层模块,包含了一个uart_rx和一个uart_tx) uart uart( .clk (clk), .rst_n (rst_n), .rx (tx_r), //接收 .tx (tx) //发送 ); //例化上位机(用来给从机发送数据) uart_tx uart_tx( .clk (clk), .rst_n (rst_n), .din (din), .din_vld (din_vld), .tx (tx_r) ); always #(CYCLE/2) clk=~clk; initial begin clk=1; rst_n=1; #(CYCLE*10); rst_n=0; din_vld=0; #(CYCLE*10); rst_n=1; din=8'b1001_0101; din_vld=1; #CYCLE; din_vld=0; #(CYCLE*434*22); $stop; end endmodule //tb_uart_tx
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
首先,我们模拟上位机发送数据,在仿真文件中拉高dout_vld,并给dout一个8位的数据1001_0101,经过拼接起始位和停止位,data锁存这一帧的数据:1_1001_0101_0
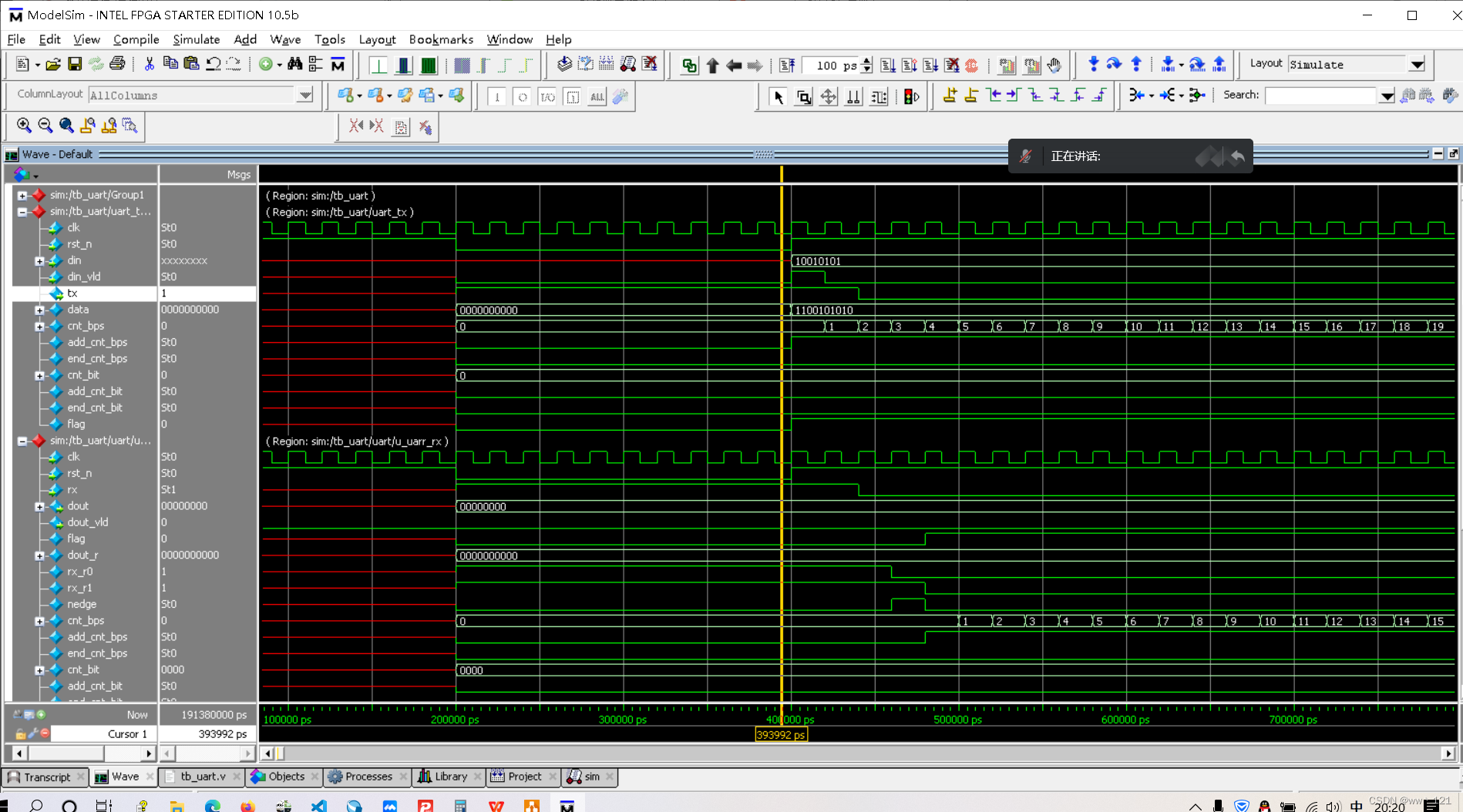 放大观察细节,在时钟上升沿检测到cnt_bps为1,则把data的第0位给tx发送
放大观察细节,在时钟上升沿检测到cnt_bps为1,则把data的第0位给tx发送
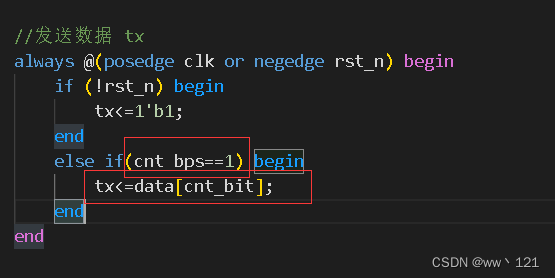
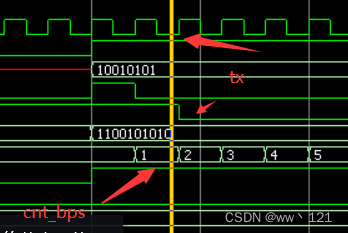 对照uart_tx的这一部分代码来理解
对照uart_tx的这一部分代码来理解
发送了起始位之后,从机(FPGA)收到起始位
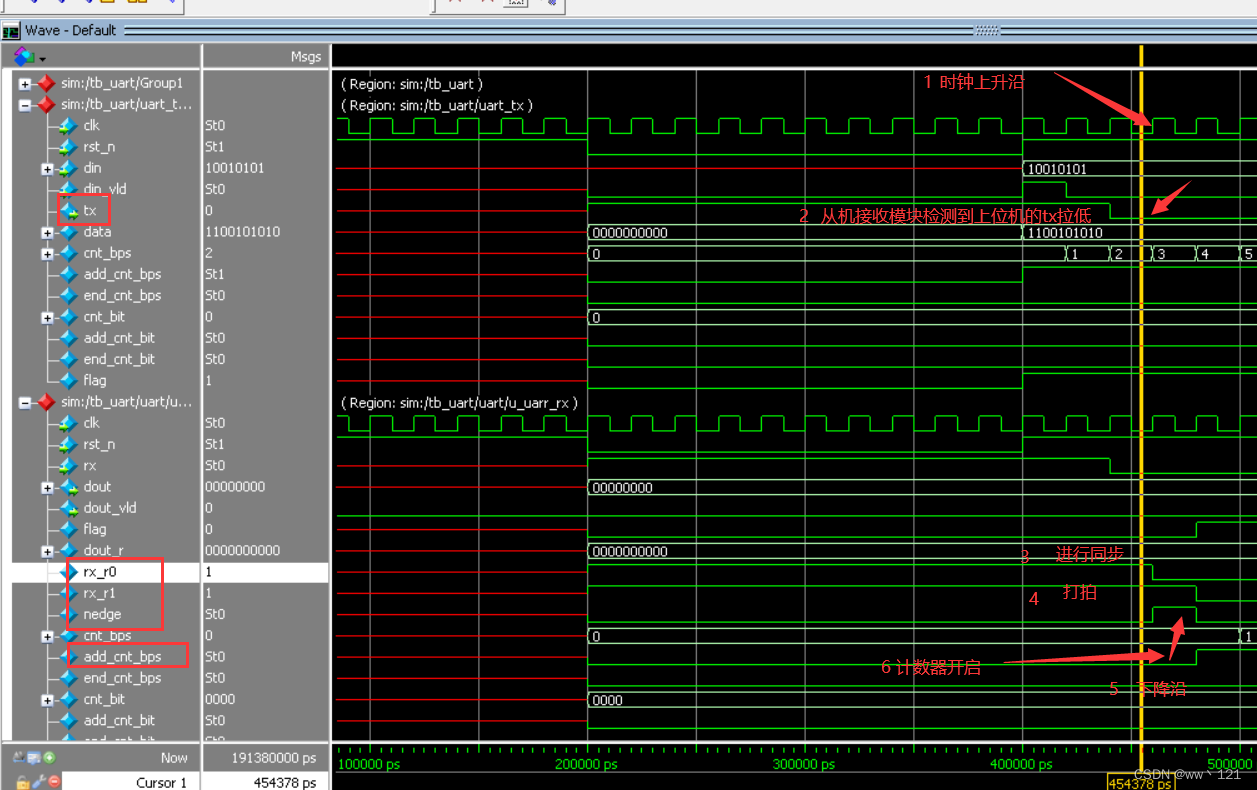
下图 第3步 从机的接收模块接收完成之后,给自己的发送模块 传送并行数据 dout 以及数据有效信号dout_vld
发送模块接收到数据有效信号dout_vld拉高,将数据缓存,并开启计数器(意味着开始传数据,!!!从起始位开始,这里缓存数据也要拼接起始位和停止位)
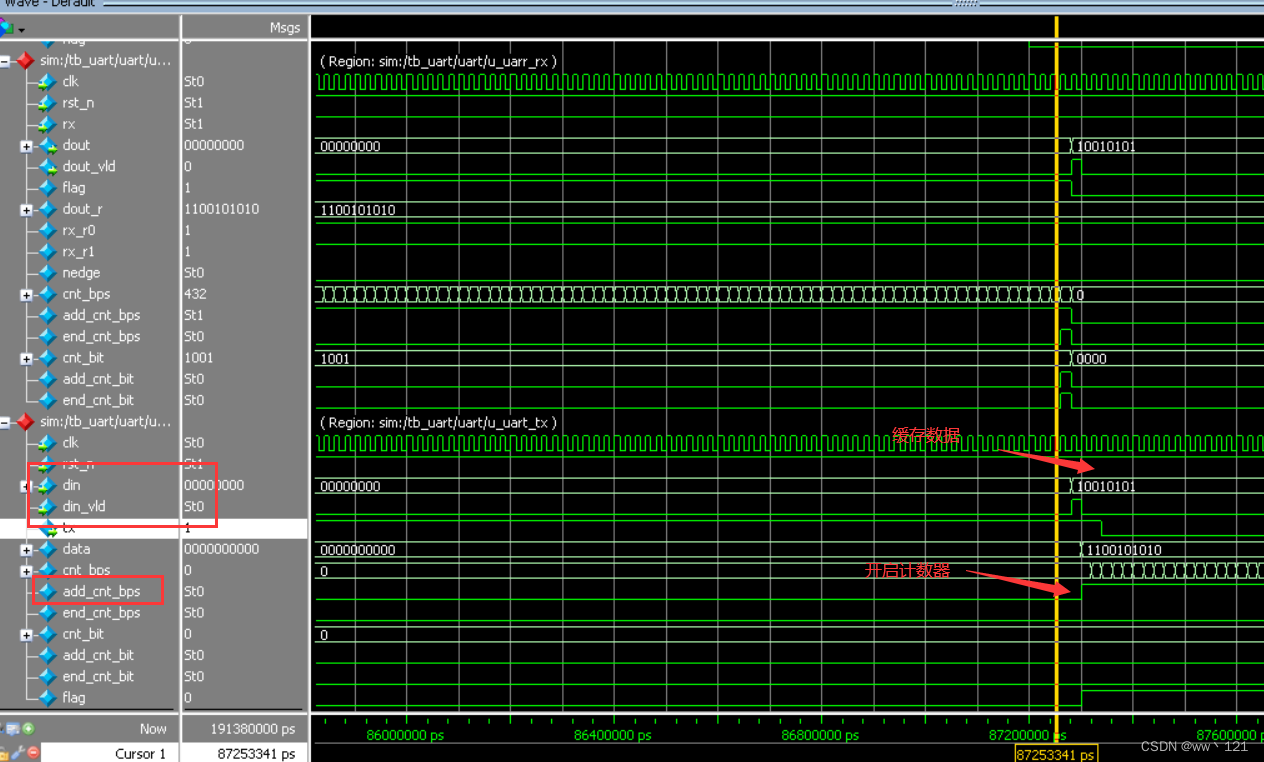 之后就跟上位机发送数据一模一样了
之后就跟上位机发送数据一模一样了
七丶上板验证
管脚绑定
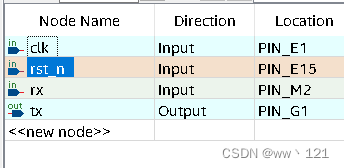
本次实验的结果:上位机(PC)给我们的从机(FPGA)发送数据之后,从机收到数据并将数据发送给上位机,如图显示的一样
下一章,我们将使用FIFO作为数据缓存单元,完成数据回环
八丶源码
https://github.com/xuranww/uart.git
参考文章:
1.https://blog.csdn.net/Rocher_22/article/details/116590629
2.https://blog.csdn.net/ybhuangfugui/article/details/109465401
本文采用的比特率是115200bps,也就是1s传输115200bit的数据,
且我们使用的时钟是20MHz
计算传输一次需要的时间:
计数时间 = 1_000_000_000ns/115200 = 8680ns
50MHz的时钟周期为20ns,所以计数传输一个比特的次数为8680 / 20 = 434 ↩︎

