
- 1MIPS 、DMIPS、MFLOPS、petaflop、teraflop_linpack teraflop
- 2全面解析 Oracle Database 20c 数据库技术架构_oracle20c与11
- 3【华为OD机试真题 Java语言】456、分披萨 | 机试真题+思路参考+代码解析(C卷)(本题100%)_分披萨java
- 4Ruby应用部署的艺术:策略与实践
- 5AI智能人机对话小程序系统源码 附带完整的搭建教程_小程序接入智能体
- 6Java虚拟机:JVM 主要组成部分与内存区域_jvm的组成和内存结构
- 7从无到有PCB一块板子_如何将立创的元件导入pads
- 8解密AI的未来:决策式AI与生成式AI的深度解析_决策式ai和生成式ai区别
- 9Linux下logrotate命令使用教程详解_logrotate -d和-f区别
- 10特洛伊木马服务器源代码(C#)
人形机器人位置控制新方案!法国洛林大学诞生多触点全身力控制控制器
赞
踩
对人形机器人的接触力间接控制,以增强机器人在复杂环境中的感知与交互能力。
这是来自法国洛林大学的新研究,研究团队研发了一款多触点全身力控制控制器。
在针对全尺寸人形机器人Talos的实验中,通过应用该控制器的新方法,成功验证了其在多触点任务中的卓越有效性和鲁棒性能。
通过手部和脚部的接触点维持平衡,机器人能够更稳定地在斜坡和不平坦表面上行走:
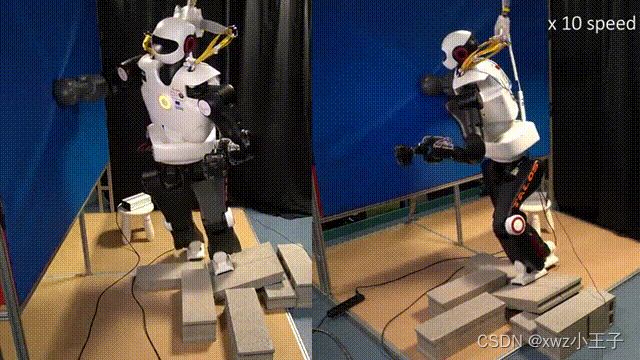
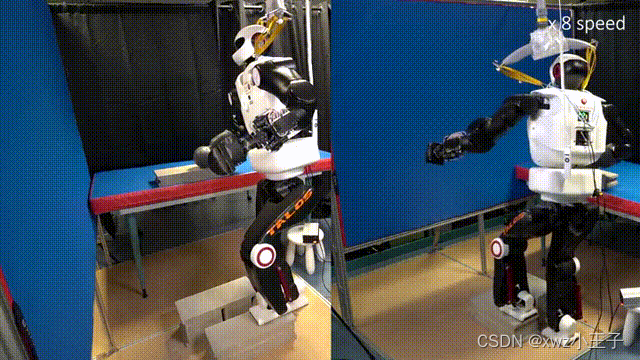
机器人以显著增强的稳定性,轻松踩上15厘米的台阶:
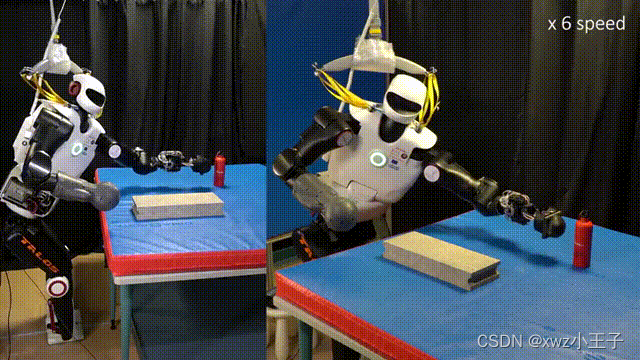
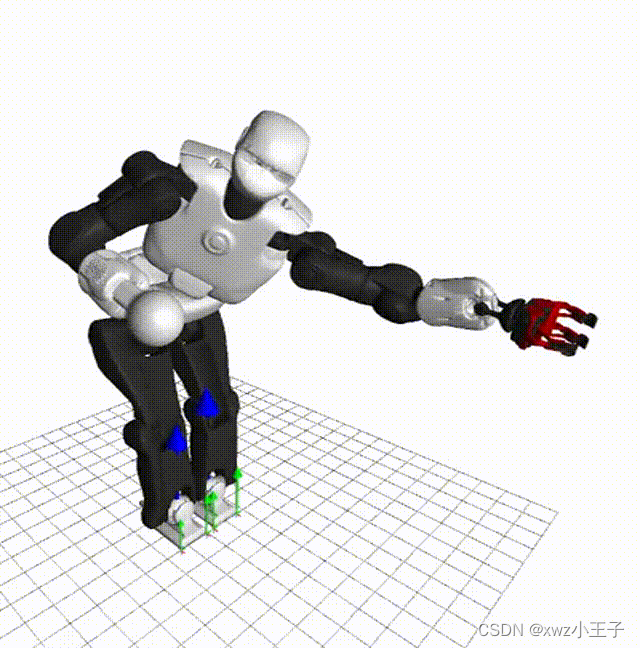
通过手部与环境的接触,机器人能够扩大其可触及的范围,能在伸展手臂时保持平衡,同时实现精确的目标触及:
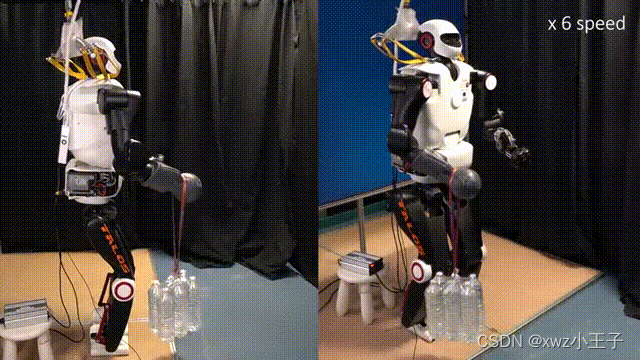
在9公斤质量模型误差的测试中,机器人也展现了出色的鲁棒性:
所以,这个为机器人多触点全身力控制提供了一种创新性解决方案的控制器,都有哪些厉害的地方呢?
▍新型控制器的背景与挑战
现今的人形机器人大多采用位置控制,这种方式虽然简单可靠,但缺乏对接触力的直接控制能力。
在多触点任务中,力的分配具有冗余性。以一个姿态为例,如果机器人双手接触到桌子,它可以通过不同的方式分配双手的力,而不会在关节位置上表现出明显变化。这种力分配的冗余性增加了控制的复杂性,尤其是在需要精确控制接触力的任务中。
以往的研究主要集中在力矩控制机器人上,通过逆动力学控制器直接调节接触力。然而,这种方法对模型和校准误差高度敏感,且难以对人形机器人的动态特性进行准确建模。
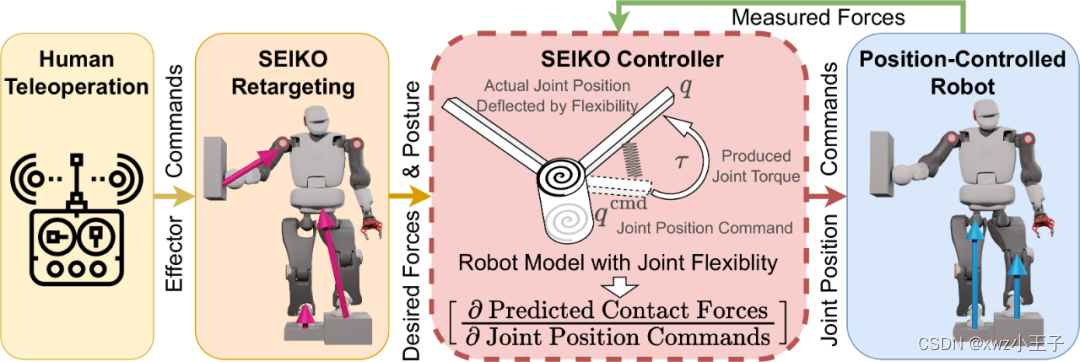
前文提到的新型控制器名为SEIKO(Sequential Equilibrium Inverse Kinematic Optimization)。它的主要创新在于利用机器人的非刚性特性来显式建模关节位置指令与接触力之间的关系。柔性可以来自非可观测的机械结构弯曲或非理想关节位置控制的内部阻抗。
SEIKO控制器通过优化二次规划(QP),在多触点准静态条件下计算姿态偏转和关节指令修正,从而间接控制接触力。这种方法不仅考虑了全身姿态变化对接触力的影响,还具备在靠近物理极限或存在显著模型误差的情况下的鲁棒性。
▍在人形机器人上的实现与验证
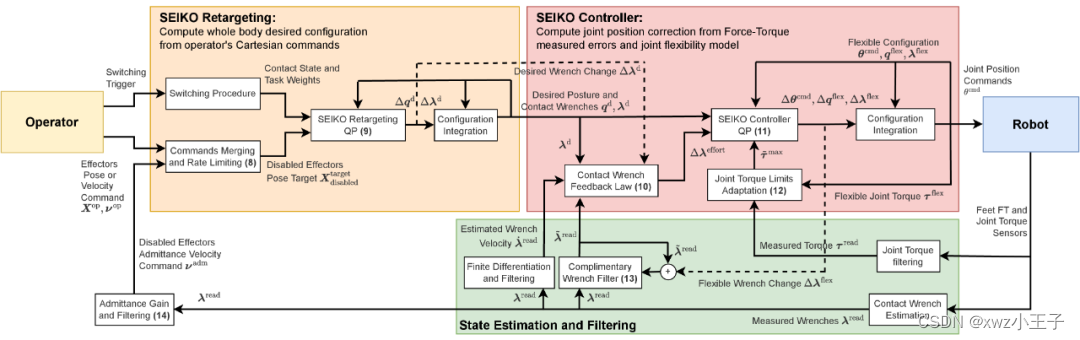
SEIKO控制器的控制架构主要包括两部分:SEIKO重定目标和SEIKO控制器。SEIKO重定目标部分从操作员的笛卡尔命令中计算出全身期望配置,而SEIKO控制器则利用关节柔性模型,从力-力矩测量误差中计算关节位置修正,以实现接触力的控制并防止超过关节力矩限制。
为了验证SEIKO控制器的有效性,研究团队在人形机器人Talos上进行了多次实验。Talos机器人配备了强大的手臂,但其髋部具有显著的机械柔性。实验包括多种多触点任务,如推力任务、远距离任务、爬楼梯和斜坡行走。
实验结果表明,SEIKO控制器不仅能够实现稳健的多触点控制,还能处理复杂的物理环境和操作员错误。
在推力任务中,Talos机器人成功地通过手臂施加力来推动物体。在远距离任务中,机器人能够在保持平衡的同时,伸展手臂以触及远处的目标。在爬楼梯和斜坡行走任务中,SEIKO控制器帮助Talos机器人在不平坦的表面上稳定行走,并有效地利用手部和脚部的接触点来维持平衡。
▍SEIKO控制器的技术细节
前文提到,SEIKO控制器的核心技术是二次规划(QP)求解。通过求解两个实时的QP问题,SEIKO控制器能够从笛卡尔命令生成全身期望配置,并利用柔性模型计算关节位置修正。
QP问题的求解过程包括以下几个步骤:
姿态偏转计算:通过第一个QP问题,SEIKO控制器计算出由于机器人柔性引起的姿态偏转。这一步考虑了机器人当前的姿态和接触力,目的是找到一个新的姿态,使得机器人在接触点上的力分布更加合理。
关节指令修正:在计算出姿态偏转后,第二个QP问题用于计算关节位置修正。这一步利用柔性模型,将姿态偏转转化为具体的关节位置指令,以实现对接触力的间接控制。
实时求解:上述两个QP问题需要在实时控制循环中快速求解。SEIKO控制器依赖高效的QP求解器,确保在每个控制周期内都能及时更新关节指令。
SEIKO控制器显式地建模了关节柔性和机器人整体非刚性的特性。这种柔性可以来自机械结构的弯曲或关节内部控制的阻尼。
具体来说,柔性模型描述了关节位置指令与实际关节位置之间的关系,并将其纳入QP求解过程中。这种方法不仅能够处理机械柔性,还能够在存在模型误差的情况下保持较高的控制精度。
SEIKO控制器设计时还充分考虑了模型误差的影响。通过柔性模型和QP求解的结合,SEIKO控制器能够在存在显著模型误差的情况下仍然保持对接触力的精确控制。
此外,控制架构中还包含了反馈控制机制,可以在实时系统中动态调整关节指令,进一步提高了系统的鲁棒性。
▍总结与展望
SEIKO控制器通过利用显式柔性模型和顺序QP优化方法,实现了对位置控制机器人接触力的间接控制,为多触点全身力控制提供了一种创新的解决方案。本文通过在Talos人形机器人上的实验证明了其在多触点任务中的有效性和鲁棒性。
虽然SEIKO控制器已经在Talos人型机器人上取得了显著成果,但其方法和架构可以推广应用到其他类型的机器人,如四足机器人、服务机器人等。通过适应不同的机械结构和柔性模型,SEIKO控制器有潜力为更多机器人提供多触点控制解决方案。
尽管SEIKO控制器已经使用高效的QP求解器来实现实时控制,但随着任务复杂性的增加,进一步优化算法性能仍然是一个重要方向。采用更快的求解器或开发新的优化算法,可以提高控制系统的响应速度和稳定性。
在复杂环境中,机器人需要更强的感知能力来识别和适应环境的变化。通过集成先进的传感器和计算机视觉技术,SEIKO控制器可以增强机器人的环境感知能力,从而更好地进行多触点控制和任务执行。
SEIKO控制器在远程操作中表现出色,但进一步研究如何提高人机协作的自然性和操作精度仍然是一个重要方向。开发更加直观的操作接口和智能辅助系统,可以帮助操作员更高效地控制机器人,尤其是在复杂和危险的任务中。
除了以上这些,未来的机器人需要具备长期自主性和学习能力,以适应不断变化的任务和环境。通过结合机器学习和强化学习技术,SEIKO控制器可以不断优化控制策略,提升机器人的自主性和适应能力。

