
热门标签
热门文章
- 1Gitee使用_idea拉取gitee代码
- 2Alpha论文系列笔记(一)AlphaGo_apalphago论文
- 3基于大模型的知识问答系统全面总结(附Python完整代码)_问答模型 及用户
- 4Vivado使用_vivado用什么语言
- 5SQL Server如何设置账号密码_安装sqlserver时没有设置用户名和密码
- 6Javaweb学生信息管理系统(Mysql+JSP+MVC+CSS)_jsp学生管理系统代码
- 7采用WPF技术,开发OFD电子文档阅读器
- 8Elasticsearch中的post_filter后置过滤器技术_elasticsearch postfilter
- 9Java项目:图书管理系统(java+SpringBoot+html+ThymeLeaf+Bootstrap+maven+mysql)_对于商品的增删改查的前端代码及后端代码idea要前端好看的javaweb项目
- 10SQL语言的分类(DQL、DML、DDL、DCL的概念与区别)_dml和sql的区别
当前位置: article > 正文
MSP432 库函数实现 PID 电机调角度、调速_msp432 pid调什么
作者:空白诗007 | 2024-06-24 08:11:18
赞
踩
msp432 pid调什么
平台:Code Composer Studio 10.4.0
MSP432P401R SimpleLink™ 微控制器 LaunchPad™ 开发套件
(MSP-EXP432P401R)
编码器及所用改进型PID知识见【电赛PID半天入门】从接触编码器到调出好康的PID波形
工程示例
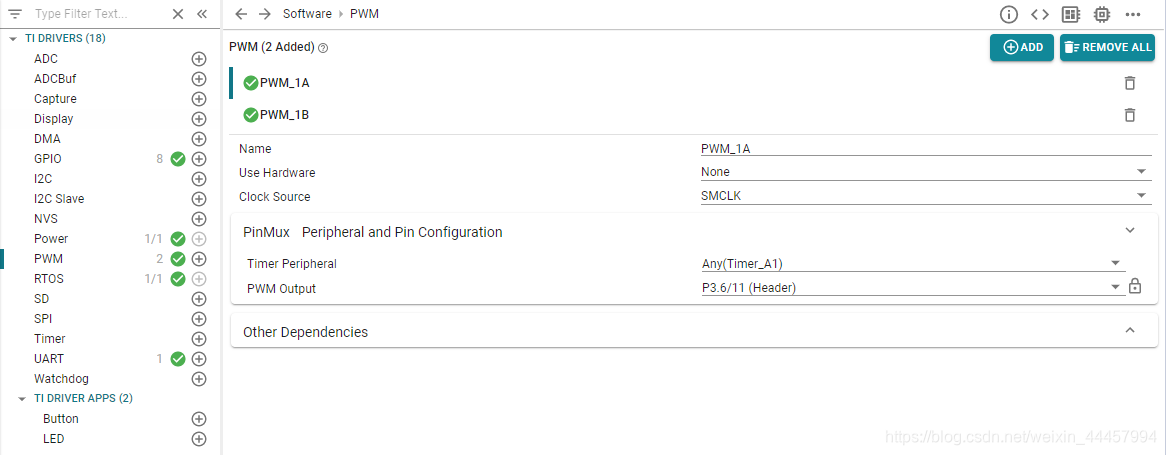
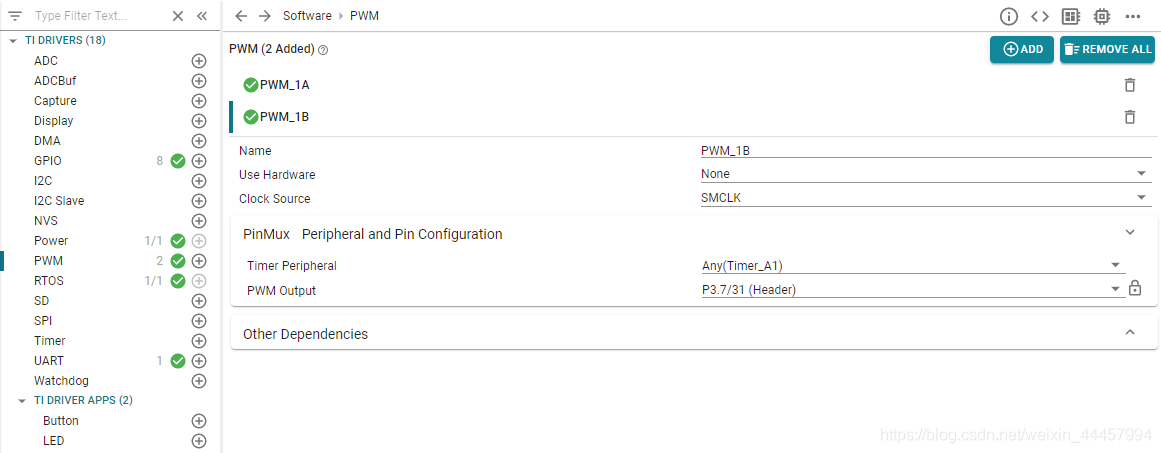
引脚配置
PWM引脚
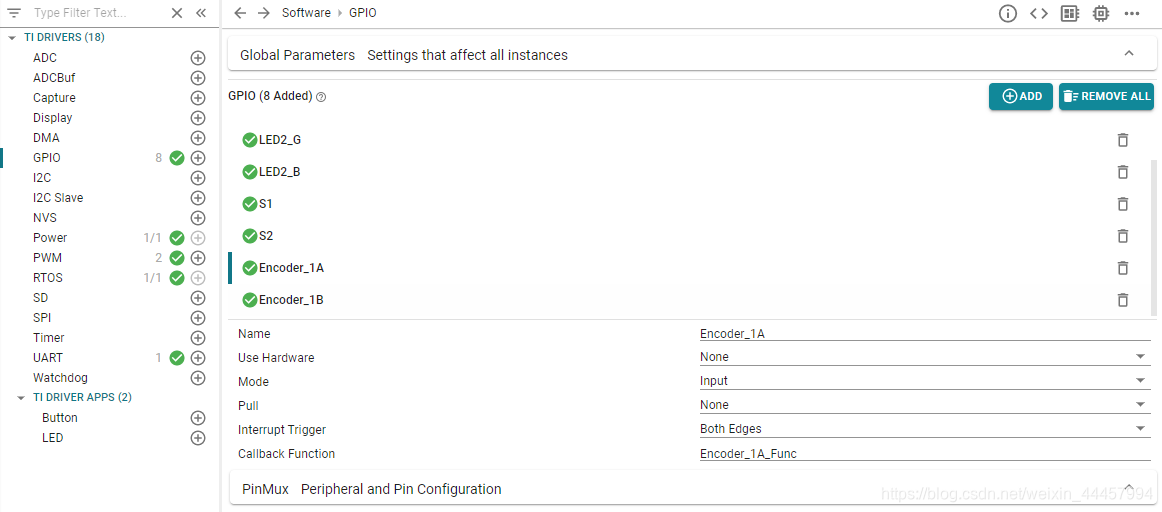
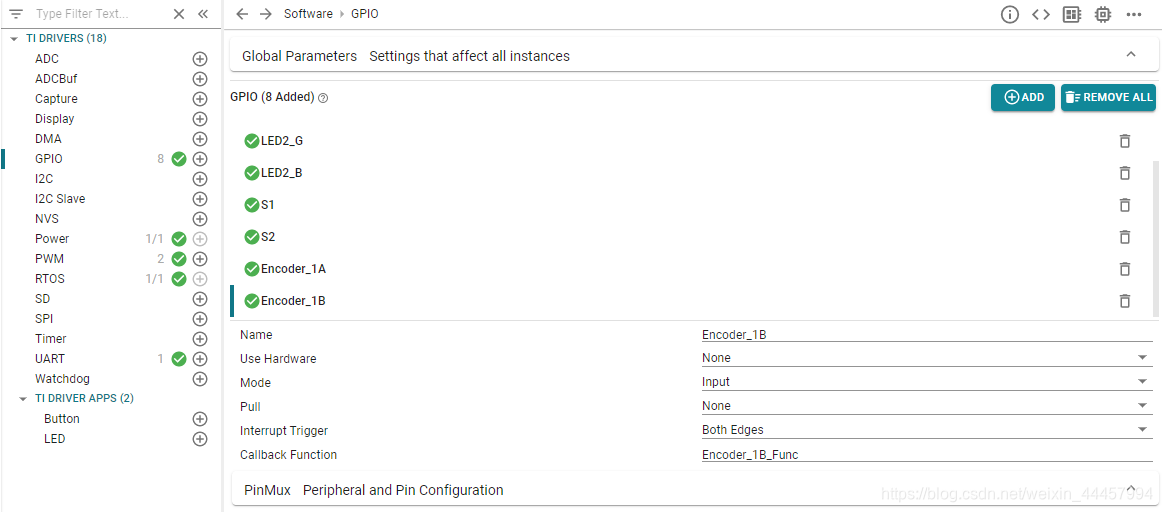
外部中断测量编码器引脚配置
代码部分
初始化
/* * ======== mainThread ======== */ void *mainThread(void *arg0) { My_Task_Init(Key_Task, 1, 1024); My_Task_Init(LED_Task, 1, 1024); GPIO_enableInt(Encoder_1A); GPIO_enableInt(Encoder_1B); My_Uart_Init(&huart1, USB_UART, 115200); My_PWM_Hz_Init(&hpwm1, PWM_1A, 1000); My_PWM_Hz_Init(&hpwm2, PWM_1B, 1000); My_Task_Init(Motor_1_Task, 2, 1024); while(1) { usleep(1000); } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
编码器解读
由于使用的是外部中断检测,该程序仅适用于13线的霍尔编码器电机,
不适用500线的光电编码器电机,实测光电编码器电机在占空比大于44%的时候会由于高强度进入中断使得控制线程不能正常控制电机。
Encoder.c
/* * Encoder.c * * Created on: 2021年8月2日 * Author: Royic */ #include "./inc/Encoder.h" motor_type_def Motor_1; int32_t Encoder_1_Count = 0; const float Step_Angle = 360. / (Encoder_1_PPR * Encoder_1_Ratio * 2); void Encoder_1A_Func(void) { if(GPIO_read(Encoder_1A)) { if(GPIO_read(Encoder_1B)) Motor_1.angle -= Step_Angle; else Motor_1.angle += Step_Angle; } else { if(GPIO_read(Encoder_1B)) Motor_1.angle += Step_Angle; else Motor_1.angle -= Step_Angle; } } void Encoder_1B_Func(void) { if(GPIO_read(Encoder_1B)) { if(GPIO_read(Encoder_1A)) Motor_1.angle += Step_Angle; else Motor_1.angle -= Step_Angle; } else { if(GPIO_read(Encoder_1A)) Motor_1.angle -= Step_Angle; else Motor_1.angle += Step_Angle; } } void Motor_Get_Speed(motor_type_def *Motor, float Angle_Now, float Delta_S) { Motor->angle = Angle_Now; Motor->speed = (Motor->angle - Motor->angle_old)/Delta_S; Motor->angle_old = Angle_Now; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
Encoder.h
/* * Encoder.h * * Created on: 2021年8月2日 * Author: Royic */ #ifndef INC_ENCODER_H_ #define INC_ENCODER_H_ #include "./inc/main.h" #include <ti/drivers/GPIO.h> #define Encoder_1_PPR 13 #define Encoder_1_Ratio 10 typedef struct { double angle; double angle_old; double speed; } motor_type_def; void Motor_Get_Speed(motor_type_def *Motor, float Angle_Now, float Delta_S); extern int32_t Encoder_1_Count; extern float Motor_1_Angle; extern motor_type_def Motor_1; #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
测速和控制部分
#define Motor_Angle_KP 0.5 #define Motor_Angle_KI 0.0025 #define Motor_Angle_KD 15 #define Motor_Speed_KP 0.1 #define Motor_Speed_KI 0.001 #define Motor_Speed_KD 1 uint8_t Angle_Or_Speed = 1; float Target_Angle = 0; float Target_Speed = 0; pid_type_def Motor_Angle_PID; pid_type_def Motor_Speed_PID; const static fp32 motor_angle_pid[3] = {Motor_Angle_KP, Motor_Angle_KI, Motor_Angle_KD}; const static fp32 motor_speed_pid[3] = {Motor_Speed_KP, Motor_Speed_KI, Motor_Speed_KD}; Kalman_Typedef Speed_Kalman; void *Motor_1_Task(void *arg0) { float Control_Var = 0; PID_init(&Motor_Angle_PID, PID_POSITION, motor_angle_pid, 100, 100, 30, 2); PID_init(&Motor_Speed_PID, PID_POSITION, motor_speed_pid, 100, 100, 500, 0); Kalman_Init(&Speed_Kalman, 1e-6, 0.001); while(1) { Motor_Get_Speed(&Motor_1, Motor_1.angle, 0.001); KalmanFilter(&Speed_Kalman, Motor_1.speed); if(Angle_Or_Speed) { PID_calc(&Motor_Angle_PID, Motor_1.angle, Target_Angle); Control_Var = Motor_Angle_PID.out; } else { PID_calc(&Motor_Speed_PID, Speed_Kalman.out, Target_Speed); Control_Var = Motor_Speed_PID.out; } if(Control_Var > 0) { My_PWM_setDuty(&hpwm1, Control_Var); My_PWM_setDuty(&hpwm2, 0); } else { My_PWM_setDuty(&hpwm1, 0); My_PWM_setDuty(&hpwm2, -Control_Var); } if(Angle_Or_Speed) UART_printf(huart1, "%d.%d, %d.%d\r\n", (int)Motor_1.angle, (int)(Motor_1.angle * 100) % 100 , (int)Target_Angle, (int)(Target_Angle * 100) % 100); else UART_printf(huart1, "%d.%d, %d.%d, %d.%d\r\n", (int)Speed_Kalman.out, (int)(Speed_Kalman.out * 100) % 100 , (int)Target_Speed, (int)(Target_Speed * 100) % 100, (int)Motor_1.speed, (int)(Motor_1.speed * 100) % 100); usleep(1000); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
卡尔曼滤波器,用于对所测速度进行滤波
kalman.c
/* 卡尔曼滤波器 整理By 乙酸氧铍 */ #include "kalman.h" double KalmanFilter(Kalman_Typedef *klm, double input) { //预测协方差方程:k时刻系统估算协方差 = k-1时刻的系统协方差 + 过程噪声协方差 klm->Now_P = klm->LastP + klm->Q; //卡尔曼增益方程:卡尔曼增益 = k时刻系统估算协方差 / (k时刻系统估算协方差 + 观测噪声协方差) klm->Kg = klm->Now_P / (klm->Now_P + klm->R); //更新最优值方程:k时刻状态变量的最优值 = 状态变量的预测值 + 卡尔曼增益 * (测量值 - 状态变量的预测值) klm->out = klm->out + klm->Kg * (input -klm->out);//因为这一次的预测值就是上一次的输出值 //更新协方差方程: 本次的系统协方差赋给 klm->LastP 为下一次运算准备。 klm->LastP = (1-klm->Kg) * klm->Now_P; return (klm->out); } void Kalman_Init(Kalman_Typedef *klm, const double klm_Q, const double klm_R)//温度klm_Q=0.01 klm_R=0.25 { klm->LastP=0.02; //上次估算协方差 klm->Now_P=0; //当前估算协方差 klm->out=0; //卡尔曼滤波器输出 klm->Kg=0; //卡尔曼增益 klm->Q=klm_Q; //Q:过程噪声协方差 Q参数调滤波后的曲线平滑程度,Q越小越平滑; klm->R=klm_R; //R:观测噪声协方差 R参数调整滤波后的曲线与实测曲线的相近程度,R越小越接近(收敛越快) }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
kalman.h
#ifndef __KALMAN_H__ #define __KALMAN_H__ typedef struct { /*不用动*/ double LastP;//上次估算协方差 double Now_P;//当前估算协方差 double out;//卡尔曼滤波器输出 double Kg;//卡尔曼增益 double Q; double R; }Kalman_Typedef; void Kalman_Init(Kalman_Typedef *klm, const double klm_Q, const double klm_R); double KalmanFilter(Kalman_Typedef *klm, double input); #endif
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
实验效果
速度滤波效果
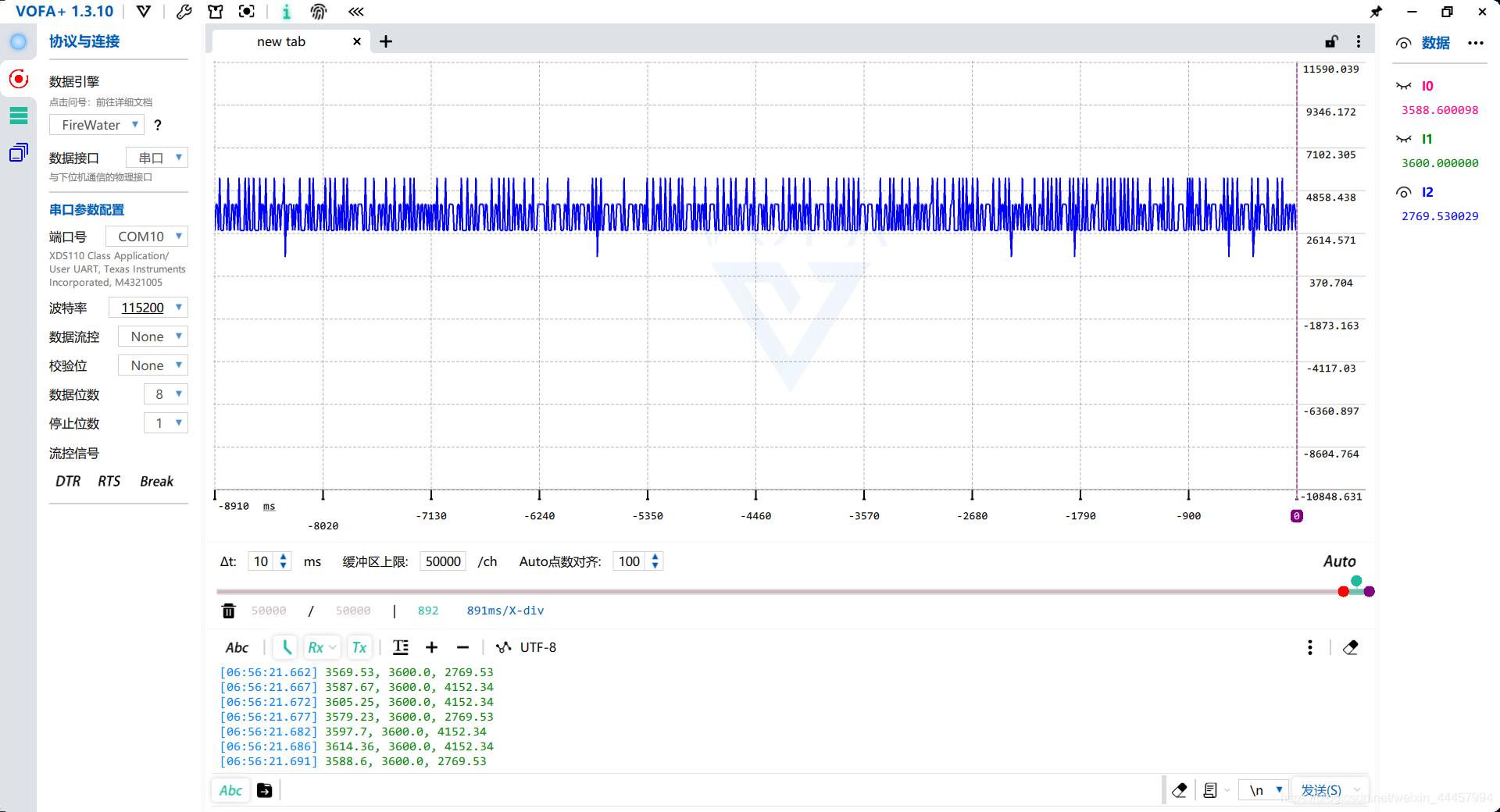
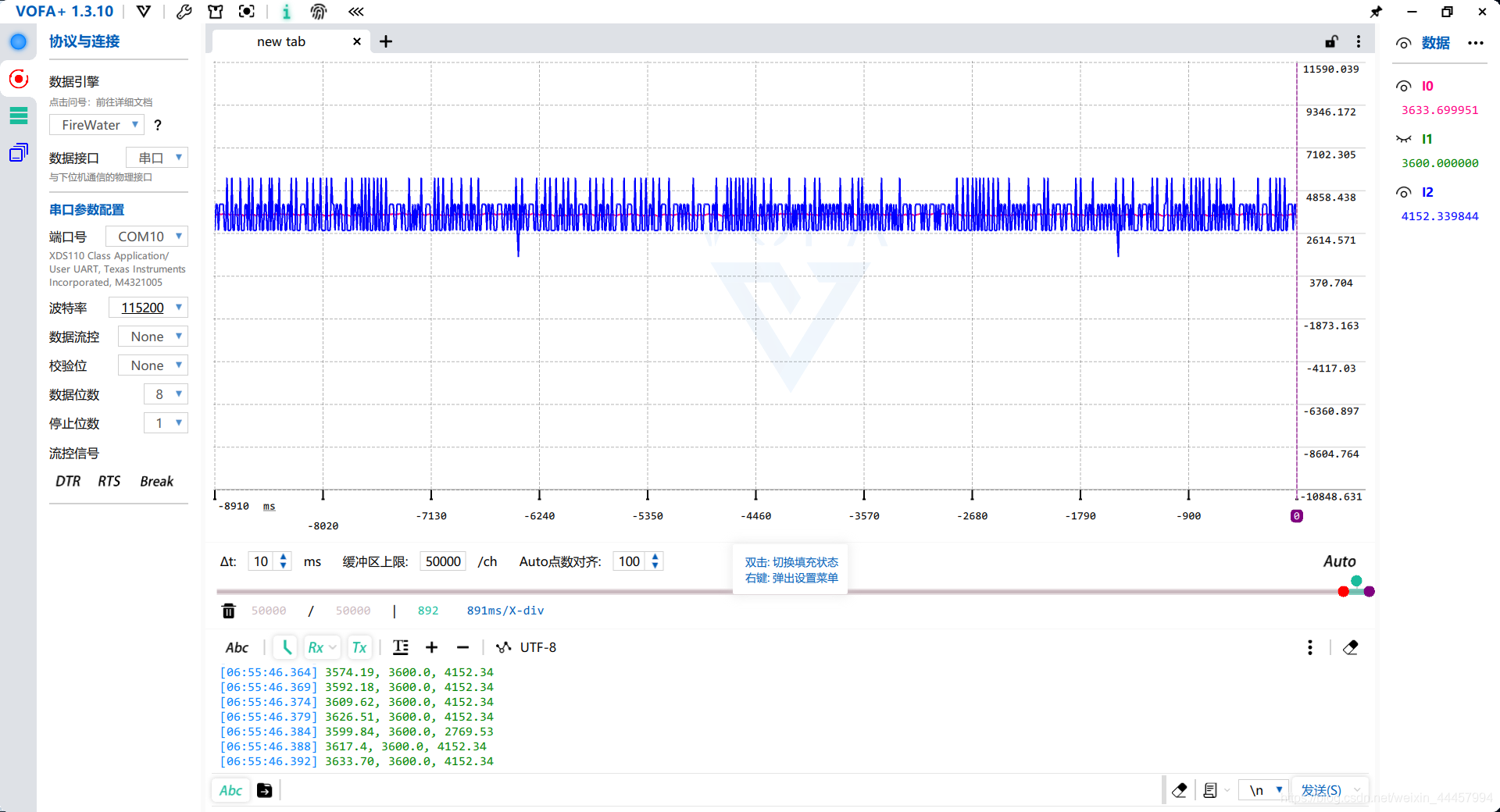
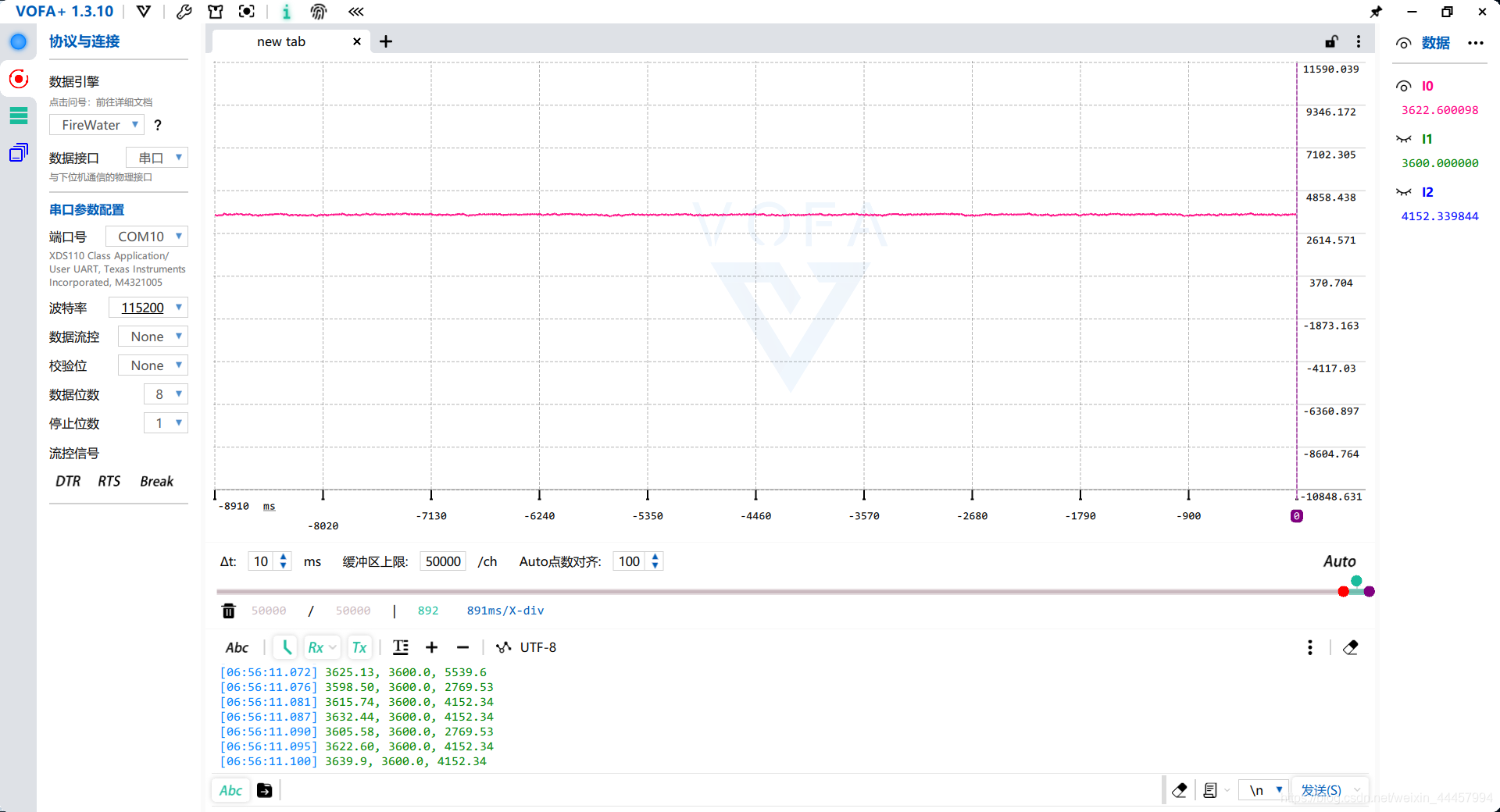
控速效果
先加速再减速



控角效果


声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/空白诗007/article/detail/752132
推荐阅读
相关标签

