
- 1Django Admin 后台自定制技巧_django admin定制
- 2深度挖掘响应式模式的潜力,从而精准优化AI与机器学习项目的运行效能,引领技术革新潮流
- 3leetcode c++ 刷题日记_c++leetcode刷题日志
- 4系统集成项目管理工程师案例分析考点汇总(成本、质量、人力)_系统集成 案例 知识点汇总
- 5业界分享 | 阿里达摩院:超大规模预训练语言模型落地实践
- 6PySpark简明教程 02 pyspark实战 入门例子_pyspark例子
- 7怎么搭建一个单机的聊天机器人
- 8将JAVA用RSA生成的加密字符串,传个接口API,实现解密(接口使用C#语言)_java rsa加密
- 9php字符串变量和常见的字符串函数
- 10浅谈Android手机cpu架构适配_arm64-v8a, armeabi-v7a
(Bezier)贝塞尔曲线在路径规划的运用_如何利用贝塞尔曲线分段优化a*路径
赞
踩
前言
之前被安排了活,一个局部区域机器运动控制的工作,大致是一个机器位于一个极限区域时候,机器要进入一个特殊的机制,使得机器可以安全的走出来。其中用到了bezier曲线进行优化路径,今天写一下,正好也给大家分享一下工作和实践的情况。
作者:良知犹存
转载授权以及围观:欢迎关注微信公众号:羽林君
或者添加作者个人微信:become_me
贝塞尔曲线基本介绍
线段都可以被拆分成两个坐标的差来表示,如下面一阶的贝塞尔曲线,P0到P1,可以用一个t进行拆分这段线,分别是线段 t(P0~P1)、线段 1-t(P0~P1),P0和P1叫做, 这条条贝塞尔的两个控制点,而贝塞尔曲线至少要有两个控制点(就是下面的这条直线,一阶贝塞尔曲线)。在贝塞尔曲线与控制点位置相关,这意味着在曲线生成过程中,我们可以通过调节控制点的位置,进而调整整个曲线。
贝塞尔的阶数和次数是一样的,二阶贝塞尔,三个点,最高次数二次。例:二阶贝塞尔:三个点,两个线段,以所有等比的点组合成的曲线叫做二阶贝塞尔曲线。
接下来给大家介绍一下贝塞尔曲线的推导工程,也比较简单,并且网上的介绍也挺多的:
一阶:
这里面有两个控制点为$ P_0 (0,0) 和P_1 (1,1)$ ,对应的曲线方程为:
B
(
t
)
=
P
t
=
(
1
−
t
)
P
0
+
t
P
1
=
P
0
+
(
P
1
−
P
0
)
t
B\big( t \big) = P_t = (1 - t) P_0 + tP_1 = P_0 + (P_1 - P_0)t
B(t)=Pt=(1−t)P0+tP1=P0+(P1−P0)t
tϵ[0,1]
这个方程可以理解为,从
P
0
P_0
P0出发,朝着
P
1
P_1
P1的方向前进
∣
∣
P
1
−
P
0
∣
∣
t
||P_1-P_0||t
∣∣P1−P0∣∣t的距离,从而得到了点B(t)的位置。t从0逐渐递增到1,这个过程完成,就成了我们所看到的曲线。
另外,之所以是一阶贝塞尔曲线是因为方程是关于t的一阶多项式,多阶也是一样。
二阶:
有三个控制点,这里的 P0、P1、P2 分别称之为控制点,曲线的产生完全与这三个点位置相关。
与一阶有些区别就在于三个控制点形成两个线段,每个线段上有一个点在运动,于是得到两个点;
再使用两个点形成一个线段,这个线段上有一个点在运动,于是得到一个点;最后一个点的运动轨迹便构成了二阶贝塞尔曲线。
对应的曲线方程为:
P
a
=
(
1
−
t
)
P
0
+
t
P
1
=
P
0
+
(
P
1
−
P
0
)
t
P_a = (1 - t) P_0 + tP_1 = P_0 + (P_1 - P_0)t
Pa=(1−t)P0+tP1=P0+(P1−P0)t
P
b
=
(
1
−
t
)
P
1
+
t
P
2
=
P
1
+
(
P
2
−
P
1
)
t
P_b = (1 - t) P_1 + tP_2 = P_1 + (P_2 - P_1)t
Pb=(1−t)P1+tP2=P1+(P2−P1)t
P
t
=
(
1
−
t
)
P
a
+
t
P
b
=
P
a
+
(
P
b
−
P
a
)
t
P_t = (1 - t) P_a + tP_b = P_a + (P_b - P_a)t
Pt=(1−t)Pa+tPb=Pa+(Pb−Pa)t
这是一条迭代公式,每次迭代都会少掉一个“点”。
最后得:
B ( t ) = P t = ( 1 − t ) 2 P 0 + 2 t ( t − 1 ) P 1 + t 2 P 2 B\big( t \big) = P_t = (1 - t)^2 P_0 + 2t(t -1)P_1 + t^2 P_2 B(t)=Pt=(1−t)2P0+2t(t−1)P1+t2P2
三阶:
有四个控制点
设控制点为P0,P1,P2和P4,曲线方程为:
B ( t ) = P t = ( 1 − t ) 3 P 0 + 3 t ( t − 1 ) 2 t P 1 + 3 t 2 ( 1 − t ) P 2 + t 3 P 3 B\big( t \big) = P_t = (1 - t)^3 P_0 + 3t(t -1)^2t P_1 + 3t^2(1-t) P_2+t^3P_3 B(t)=Pt=(1−t)3P0+3t(t−1)2tP1+3t2(1−t)P2+t3P3
配图这是matlab生成的gif动画,大家想要的也可以找我,代码私发给大家。
N阶:
我们发现,实际上是每轮都是 n 个点,形成 n-1 条线段,每个线段上有一个点在运动,那么就只关注这 n-1 个点,循环往复。最终只剩一个点时,它的轨迹便是结果。
如此一来,你会发现贝塞尔曲线内的递归结构。实际上,上述介绍的分别是一阶、二阶、三阶的贝塞尔曲线,贝塞尔曲线可以由阶数递归定义。
N阶贝塞尔曲线公式:
B ( t ) = ∑ i = 0 n ( i n ) P i ( 1 − t ) n − i t i , t ∈ [ 0 , 1 ] B\big( t \big) = \sum\limits_{i=0}^{n} \big(_{i}^{n} \big) P_i(1-t)^{n-i} t^i ,t\in [0,1] B(t)=i=0∑n(in)Pi(1−t)n−iti,t∈[0,1]
贝塞尔曲线应用
贝塞尔曲线在动画中有应用,前端以及一些其他显示要求;此外在路径规划过程中,也会使用贝塞尔曲线进行规划好路径再优化,我就是使用了后者进行优化规划好的路径,使得机器行走更加顺畅,不过使用中大家需要按照机器实际相应来进行调整t的精度以及阶数。
由于贝塞尔曲线本身的数学表达式便是一条递归式,所以决定采用递归的方式来实现。代码如下,BezierCurve函数实现贝塞尔曲线迭代,UseBezierOptimizePath函数的第二个参数进行控制使用的阶数,最后调用opencv实现可视化效果。
#include <iostream> #include <opencv2/opencv.hpp> #include <opencv2/core.hpp> #include <vector> using namespace cv; using std::cout; using std::endl; using std::vector; template <typename T> T BezierCurve(T src) { if (src.size() < 1) return src; const float step = 0.003;//1.0/step T res; if (src.size() == 1) {//递归结束条件 for (float t = 0; t < 1; t += step) res.push_back(src[0]); return res; } T first_part{}; T second_part{}; first_part.assign(src.begin(), src.end() - 1); second_part.assign(src.begin() + 1, src.end()); T pln1 = BezierCurve(first_part); T pln2 = BezierCurve(second_part); for (float t = 0; t < 1; t += step) { typename T::iterator::value_type temp{}; temp += pln1[cvRound(1.0 / step * t)] * (1.0 - t) ; temp += pln2[cvRound(1.0 / step * t)] * t; res.emplace_back(temp); } return res; } template <typename T> T UseBezierOptimizePath(T path,uint8_t order_number) { if(path.size() < order_number) return {}; T new_path{}; for(uint8_t i=0;i<path.size()-(order_number-1);i+=(order_number-1)) { T tmp = BezierCurve(T(&path[i],&path[ i + order_number])); new_path.insert(new_path.begin(),tmp.begin(),tmp.end()); } return new_path; } int main(int argc, char const* argv[]) { while (1) { cout<< endl; cout<< endl; cout<< endl; vector<Point2f> path; RNG rng; for (int i = 1; i <8; i++) path.push_back(Point2f(i * 800 / 8, random() % 800));//rng.uniform(0,800)));//cvRandInt(rng) % 800)); Mat img(900, 1200, CV_8UC3); img = 0; for(uint8_t i =0;i < path.size() -1;i++) { cout<< path[i]<< ","<< endl; line(img,Point(path[i].x, path[i].y),Point(path[i+1].x, path[i+1].y), Scalar(255, 0, 0), 16, LINE_AA, 0); } cout<< endl; // imshow("line", img); for (int i = 0; i < path.size(); i++) circle(img, path[i], 3, Scalar(0, 0, 255), 10); //BGR // vector<Point2f> bezierPath = bezierCurve(path); vector<Point2f> bezierPath = UseBezierOptimizePath(path,4); for (int i = 0; i < bezierPath.size(); i++) { // circle(img, bezierPath[i], 3, Scalar(0, 255, 255), 3); //BGR img.at<cv::Vec3b>(cvRound(bezierPath[i].y), cvRound(bezierPath[i].x)) = { 0, 255, 255 }; // printf("pose(%f %f)\n",bezierPath[i].x,bezierPath[i].y); imshow("black", img); // waitKey(10); } if (waitKey(0) == 'q') break; } return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
显示效果如下:
三阶
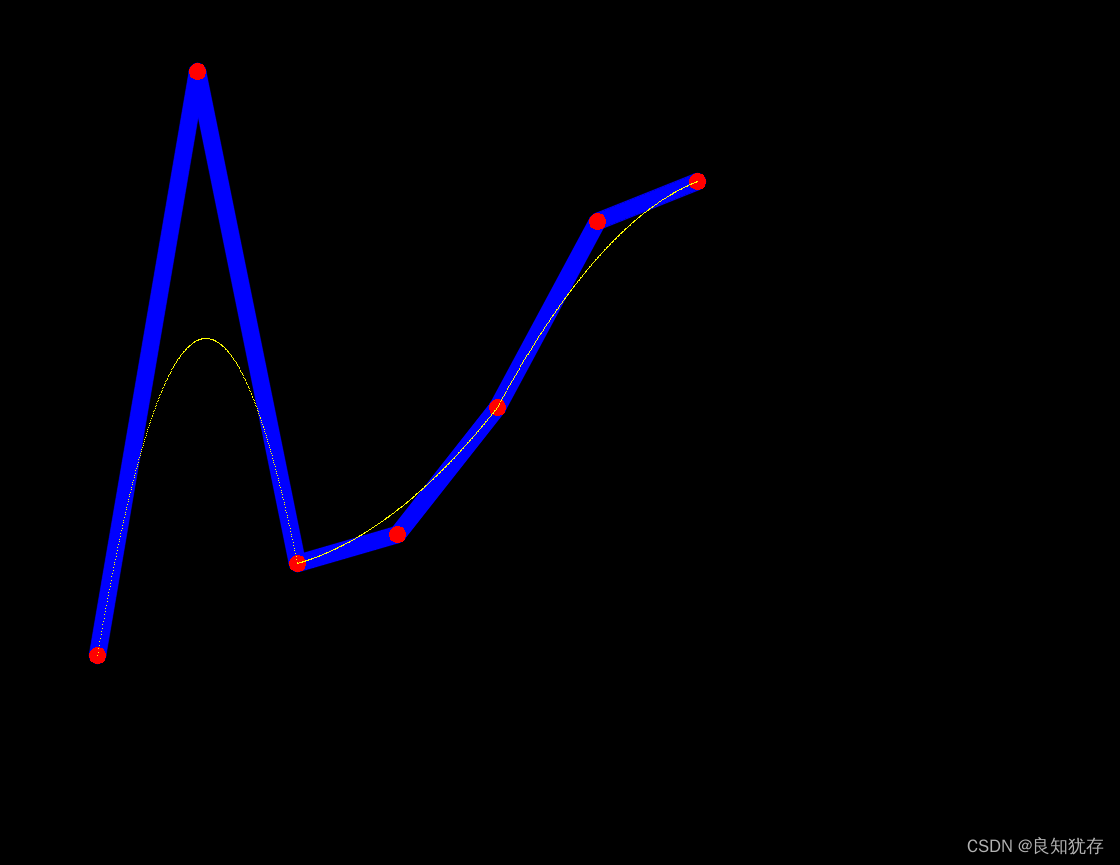
四阶

结语
这就是我自己的一些使用塞尔曲线的使用分享。如果大家有更好的想法和需求,也欢迎大家加我好友交流分享哈。
作者:良知犹存,白天努力工作,晚上原创公号号主。公众号内容除了技术还有些人生感悟,一个认真输出内容的职场老司机,也是一个技术之外丰富生活的人,摄影、音乐 and 篮球。关注我,与我一起同行。
‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧ END ‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧‧
- 1
推荐阅读
【3】CPU中的程序是怎么运行起来的 必读
本公众号全部原创干货已整理成一个目录,回复[ 资源 ]即可获得。

