
热门标签
热门文章
- 1机器学习多步时间序列预测解决方案_实时预测系统: 该模型相对较快,因此可以实时预测目标变量
- 2flask 前后台文件多张图片传递api;AIGC streamlit、gradio多图片页面展示_gradio flask
- 3iOS绘制物理按钮 - 透明圆角渐变边框
- 4RT_thread STM32通用Bootloader 做OTA升级_rtthread 如何远程升级
- 5mysql非空约束写法_MySQL非空约束(NOT NULL)
- 6Unity与原生交互之AndroidStudio篇——Unity导出Android工程,导入AndroidStudio打包APK全流程
- 7【项目管理冲刺-必会概念】_参与征询说明叙述
- 8Polkadot 2024:八大核心趋势,一文掌握生态增长关键点
- 9Sora到底有多炸裂,四款视频大模型5大场景测评,从ChatGPT到Sora_大模型 视频 sora
- 10CVPR 2023!自动Transdecoder神经坐标映射用于相机定位:NeuMap
当前位置: article > 正文
大疆激光雷达Livox Avia开箱及测试_livox avia lidar3
作者:笔触狂放9 | 2024-05-20 12:47:48
赞
踩
livox avia lidar3
大疆激光雷达Livox Avia
箱子

 从左至右为:大疆激光雷达Livox Avia ,电源转接插座,内六角形L型扳手,镜头清洁布,螺钉包,说明书,1.5米航插电源网口线,同步信号线(三个引脚)及电源线(黑-负,红-正引脚)。
从左至右为:大疆激光雷达Livox Avia ,电源转接插座,内六角形L型扳手,镜头清洁布,螺钉包,说明书,1.5米航插电源网口线,同步信号线(三个引脚)及电源线(黑-负,红-正引脚)。
先阅读手册
激光雷达:905nm;水平角70.4度,垂直77.2度。反射率80%-320m;反射率10%-190m
 前往官网下载最新的Livox Viewer以及相关的手册和软件-www.livoxtech.com
前往官网下载最新的Livox Viewer以及相关的手册和软件-www.livoxtech.com
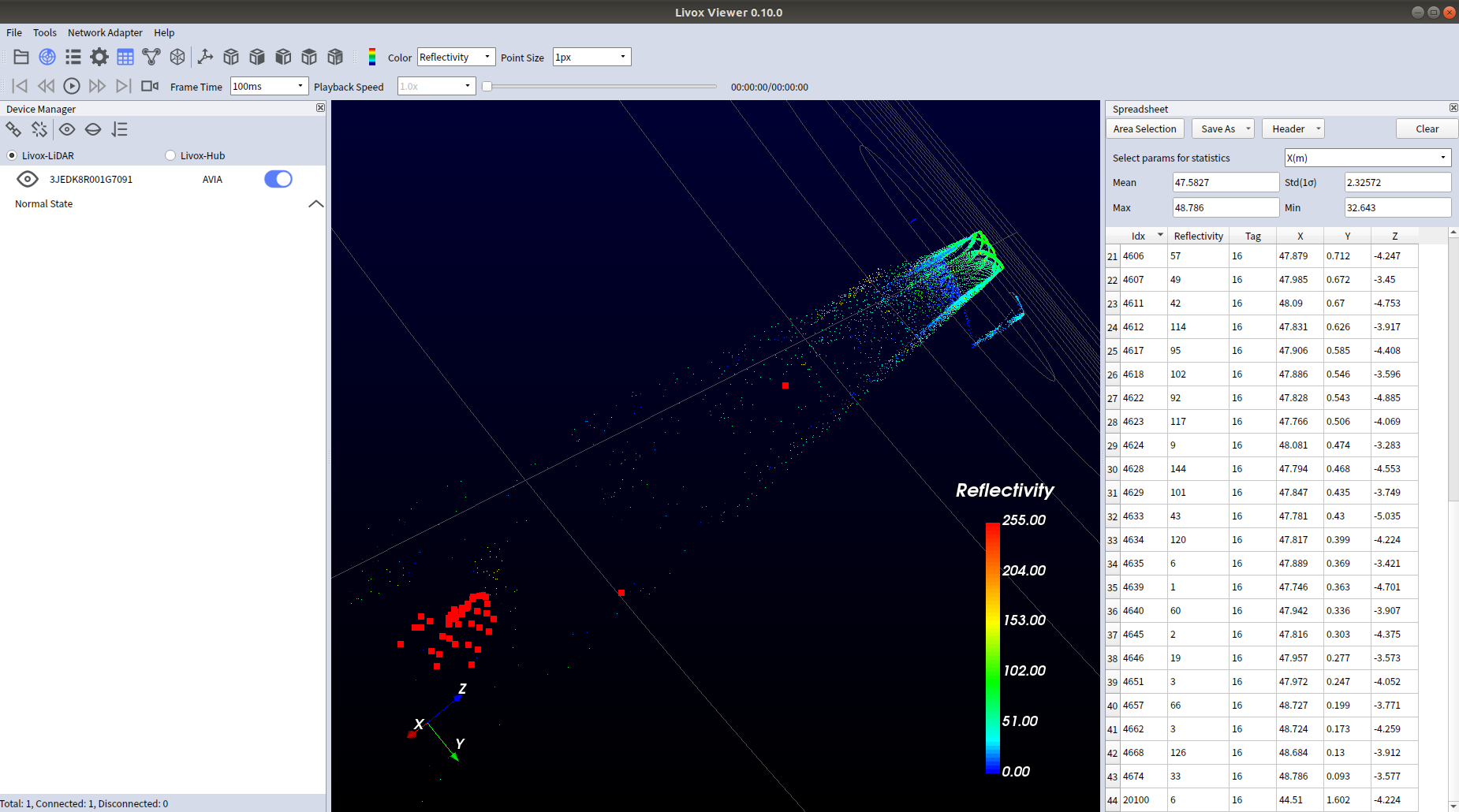
阅读Livox Viewer
需要ubuntu 16.04/18.04。
如将 PC 与 Livox 设备直连,则需要将 PC的 IP 类型设置为静态 IP,IP 地址为 192.168.1.2,子网掩码为 255.255.255.0,默认网关为 192.168.1.1。
Ubuntu 用户:下载并解压文件,启动终端并进入解压缩后文件夹的根目录,运行指令:./livox_viewer.sh 即可启动。
测试Livox Viewer
下载ros驱动
https://github.com/Livox-SDK/livox_ros_driver.git
按步骤编译
roslaunch livox_ros_driver livox_lidar_rviz.launch [param]
如果param参数为空,livox_ros_driver将根据配置文件中的配置连接到相应的设备。
连接规则如下当配置文件中指定的设备的连接状态配置为启用连接(true)时,livox_ros_driver将只连接到配置文件中指定的设备;
当配置文件中指定的设备连接状态全部配置为禁止连接(false)时,livox_ros_driver会自动连接所有扫描到的设备;
ROS驱动下的运行效果


所用系统
Ubuntu 18.04 ROS melodic
标题
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/597728
推荐阅读
相关标签

