
热门标签
热门文章
- 1脉冲神经网络入门
- 2AI智能体|使用扣子Coze创建AI绘画助手_扣子coze生成图片
- 3欧科云链:坎昆升级完成后,能否把以太坊的高额Gas费“打下来”?
- 4LeetCode二叉树系列——257二叉树的所有路径_257. 二叉树的所有路径
- 5VSCode提交代码到git操作指南_vscode首次提交git
- 6XC7VX690T板卡设计资料:VC709E 基于FMC接口的Virtex7 XC7VX690T PCIeX8 接口卡 软件无线电处理平台 图形图像硬件加速器 Net FPGA_xc7vx690t ddr
- 7【kafka】Kafka扩容_kafka buffer.memory 不够 会扩充吗
- 8DM_SQL索引相关_dm数据库查索引
- 9c语言实现链表_基于c 实现的链表
- 10QT-字体文件加载_qt 加载ttf字体库渲染文字
当前位置: article > 正文
KUKA Simpro 3.0.3-第5弹(机器人关节轴活动范围监测)
作者:笔触狂放9 | 2024-05-23 22:36:50
赞
踩
KUKA Simpro 3.0.3-第5弹(机器人关节轴活动范围监测)
Robot轴关节活动范围监测
方法一:
a、确保机器人在离线轨迹的的初始位置,并且尽可能确保第一条指令为PTP;
b、确保第一条指令下的机器人关节姿态为默认状态,如下图所示;
b1、点击My_Job的第一条指令,此时机器人将呈现此时的姿态;
b2、点击Save State,保存机器人此时姿态;(此时保存姿态下,每次Simpro项目打开,机器人都会以此种姿态呈现);
b3、点击Simulation上的Reset,置空机器人关节活动的数据值;
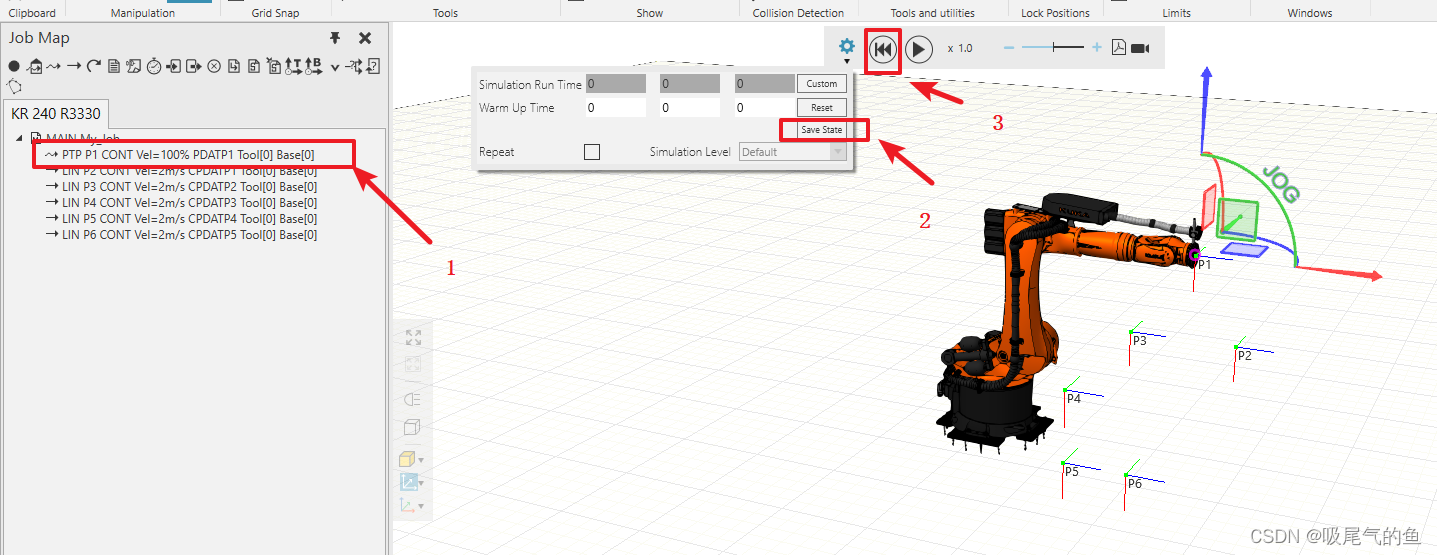
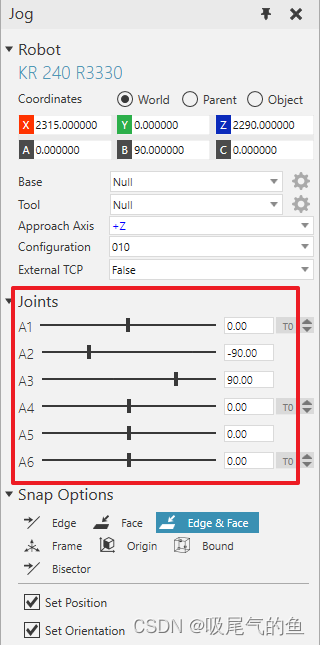
b4、此时Program——Jog——Robot——Joints上各关节没有活动范围显示;
c、Simulation——Play——运行仿真程序,运行结束后。在Program——Jog——Robot——Joints——此时各关节轴上存在活动量,鼠标移至相应的关节轴上,将呈现对应关节轴的运动范围;
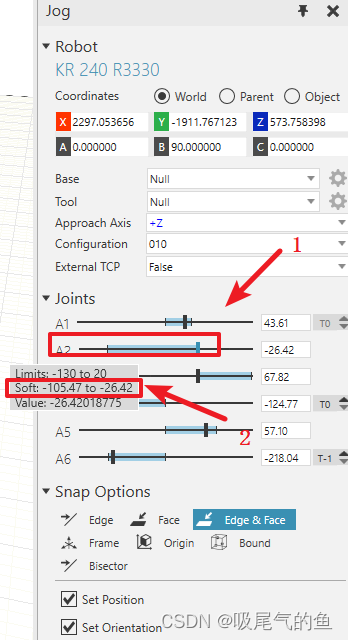
d、同理查看其余各轴活动范围;
方法二:
a、利用Home——Statistics数据统计;(打开页面如图所致)(3——折线图;4——采样间隔时间s;5——导出格式)
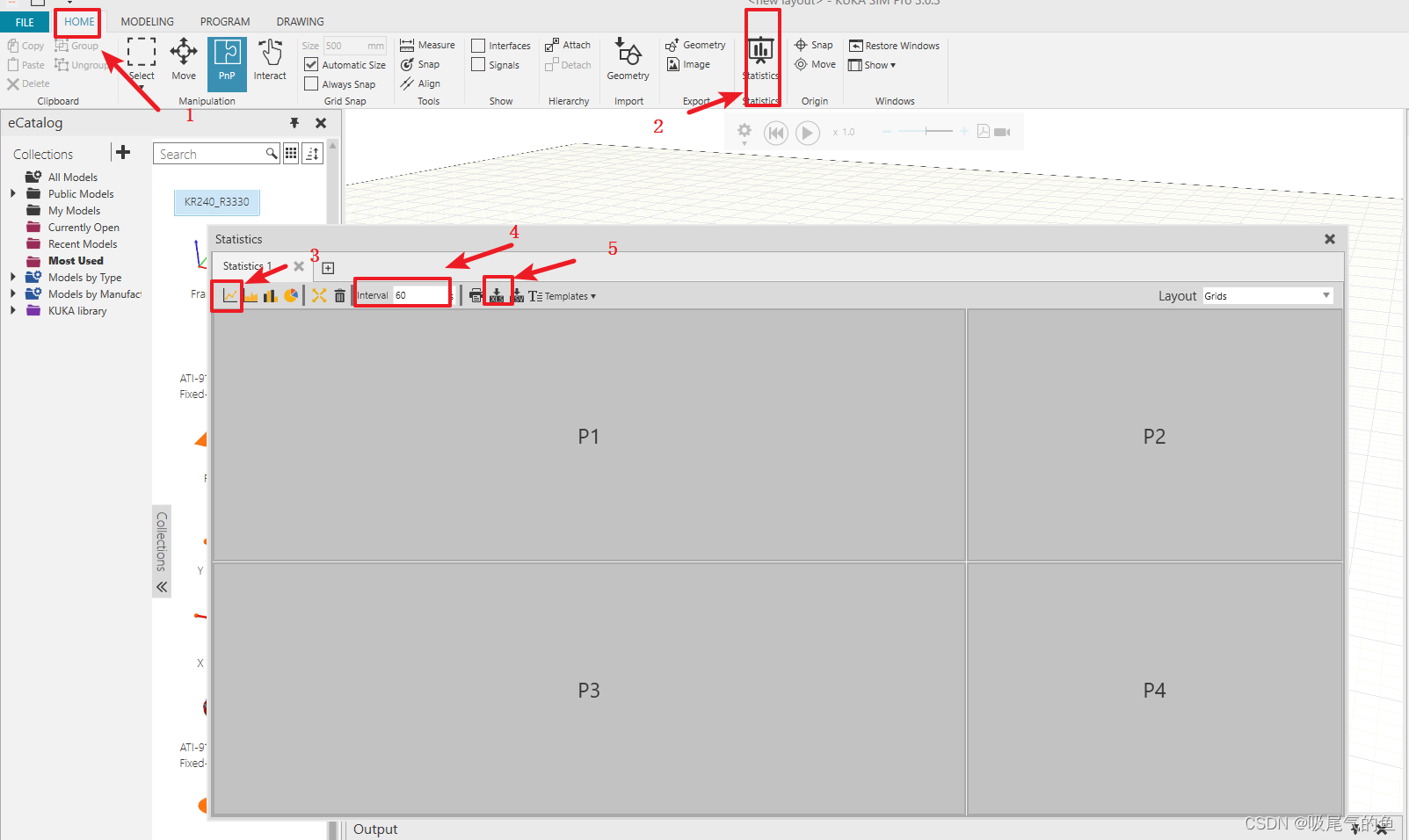
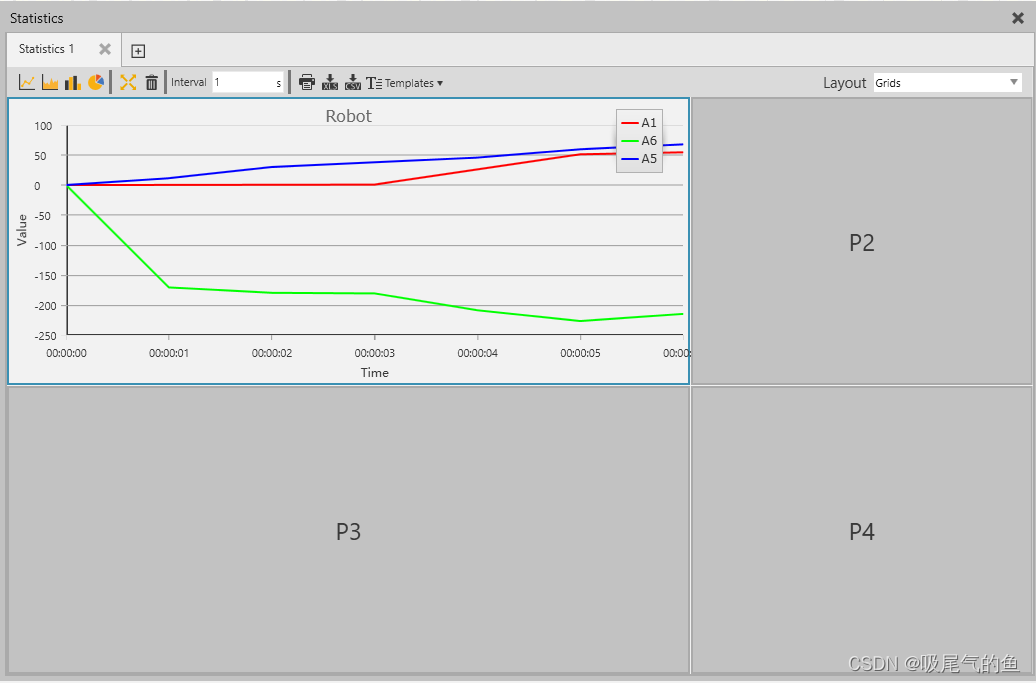
b、Statistics监控robot的关节轴设置如下图:
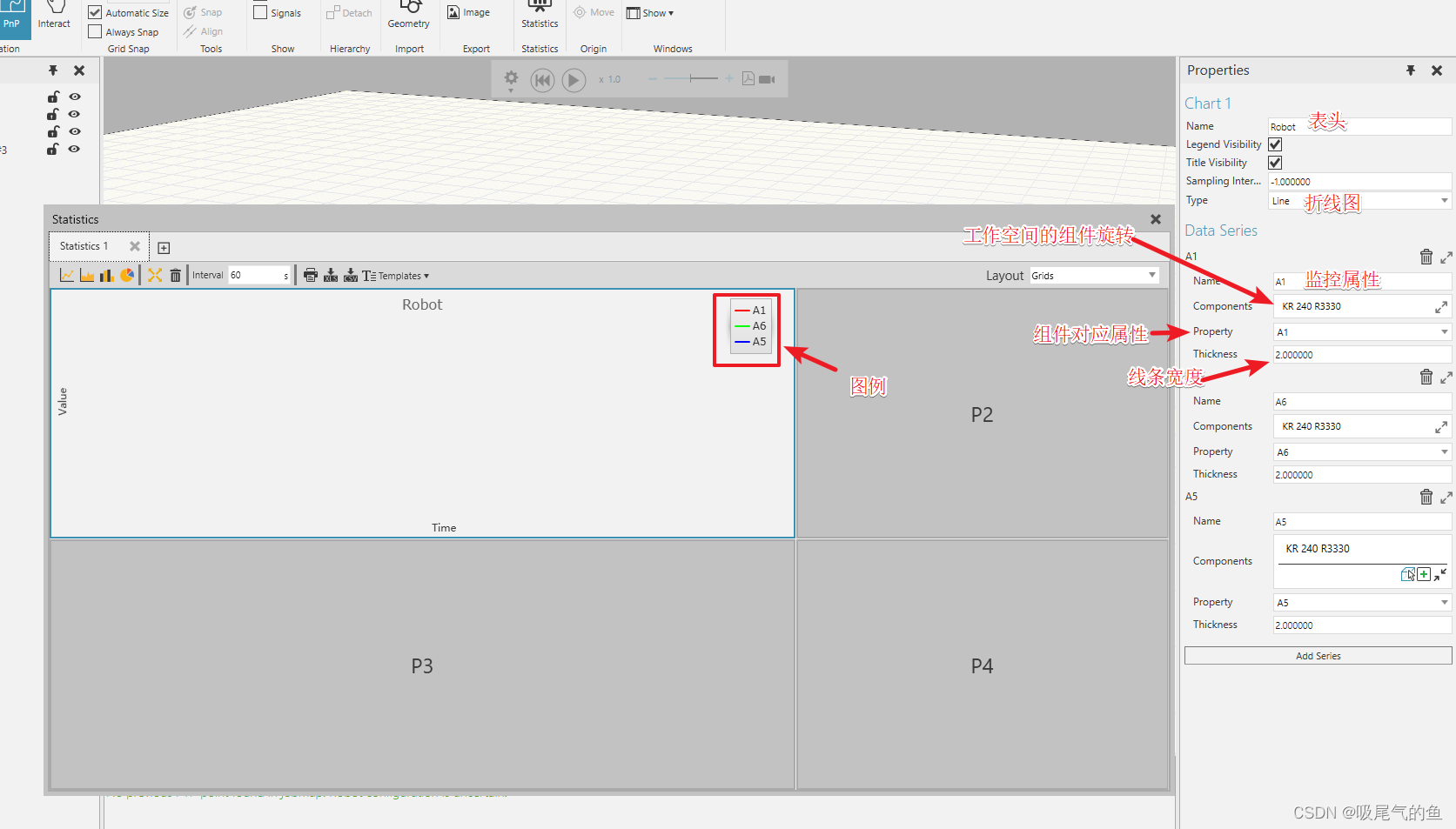
c、修改采样时间,并运行仿真开始键(运行时确保机器人位于第一条指令处),记录各关节轴的运动;
d、根据需要可以件数据导出到Excel中;
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/614683
推荐阅读
相关标签

