
热门标签
热门文章
- 1github出现Your account has been flagged.导致账号无法公开的解决办法
- 2MySQL_mysqlset语句
- 3Node.js版本管理工具-NVM
- 4【研发日记】Matlab/Simulink软件优化(二)——通信负载柔性均衡算法_rtmseterrorstatus
- 5Git 从入门到放不下
- 6java mongodb 批量删除_java 实现mongoDB 增加,删除,修改,查看,多条件查询,聚合查询,分组查询(史上最全)...
- 7VSCode 更换默认的 terminal(终端)_vscode terminal
- 8【Kafka】Kafka的重复消费和消息丢失问题_kafka重复消费
- 9ros2发布者节点_rclcpp::spin(node);的作用是
- 10司法阅读理解方案总结_法律文本阅读理解算法
当前位置: article > 正文
我终于实现Moveit+gazbeo对机械臂的联合仿真控制了_ros gazebo与实际机械臂联调
作者:笔触狂放9 | 2024-06-11 15:39:19
赞
踩
ros gazebo与实际机械臂联调
开发机械臂,别的问题都好商量,但是对于实体机械臂这个烧钱的东西来说,绝对是一大批开发者的拦路虎。方法总比困难多。对于没有实体机械臂只能进行仿真的人来说,gazebo可真是太香了。但是浏览了一众网上的的教程,一步一步跟着走了无数遍,最终面临的问题是Rviz中的机械臂动但是Gazebo中的机械臂一动不动。
苦心钻研,终于,在moveit_setupassistant生成的文件基础上,完成了moveit+gazboe的联合仿真。具体操作流程为:
我的环境:
linux:Ununtu 18.04
Ros:melodic+moveit1+gazbeo 9.0
1、准备URDF文件
这里我用的是SW中导出的urdf模型,这里网上的教程很多,这里不赘述。
2、生成配置文件
保险起见,我把我的每一步配置都放着下面,其实网上很多教程都是 每位博主成功的历程,我们跟着一步一步操作,不能成功原因可能就是一些细节,但是这些细节真的很重要。
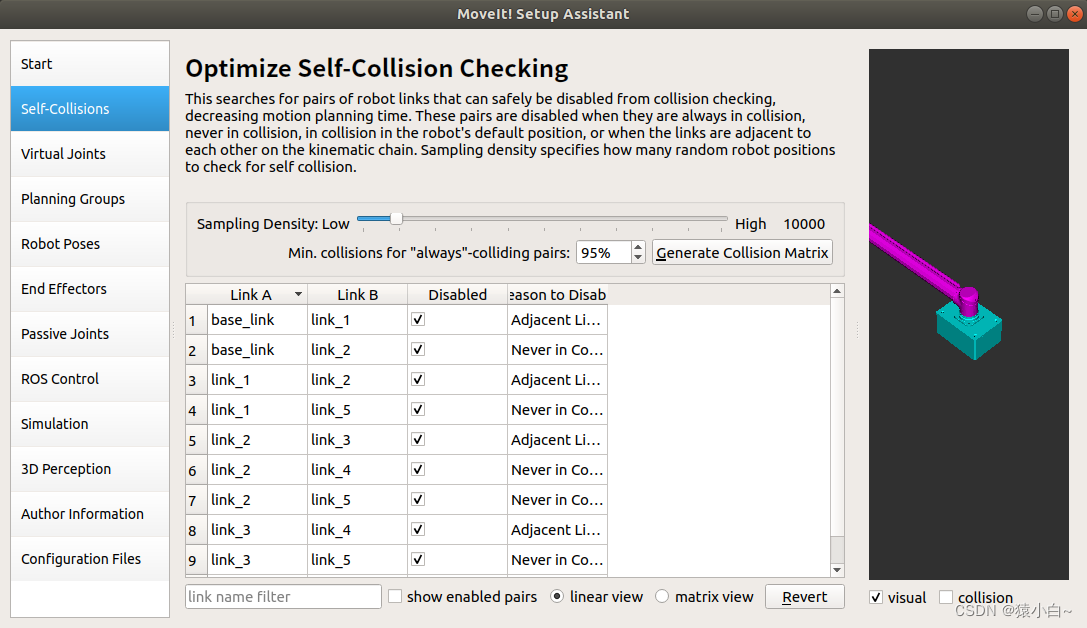
2.1 生成碰撞矩阵,这部分就是无脑操作 直接点击Generate collision matrix生成即可
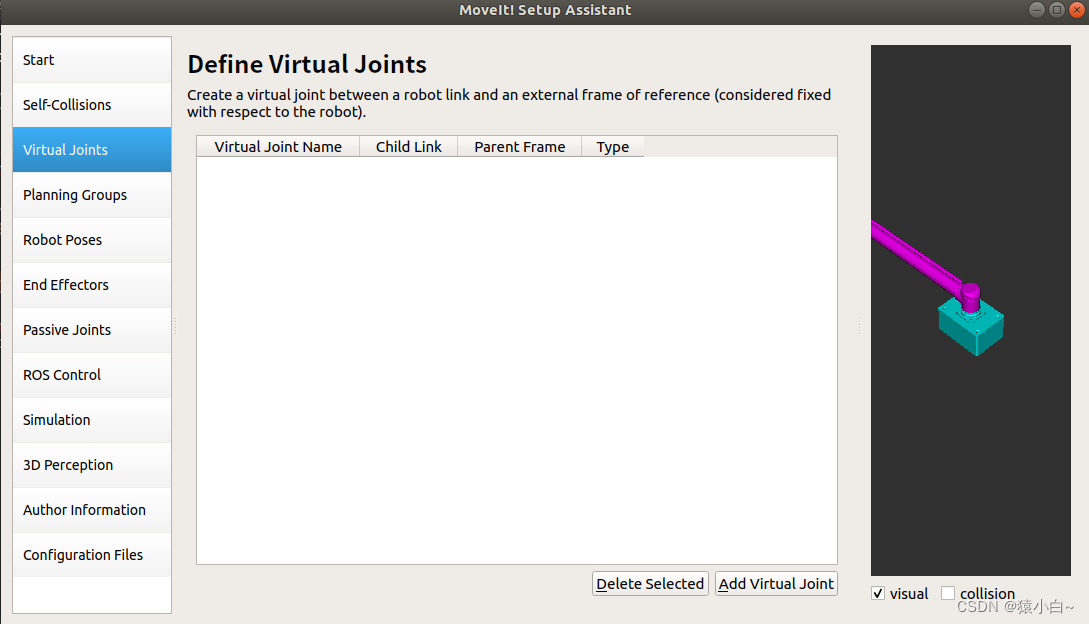
2.2 添加虚拟关节,这部分的作用据说是防止机械臂在gazbeo中倾覆,但是我实验了一下吗,即使设置了也没有用,所以这步直接跳过
2.3 设定规划组
如果没有特殊要求,为了保证实现mvoeit+gazbeo 的联合仿真,大家就按照我的配置方式设置就行(别的方式我没试过,不知道能否成功)。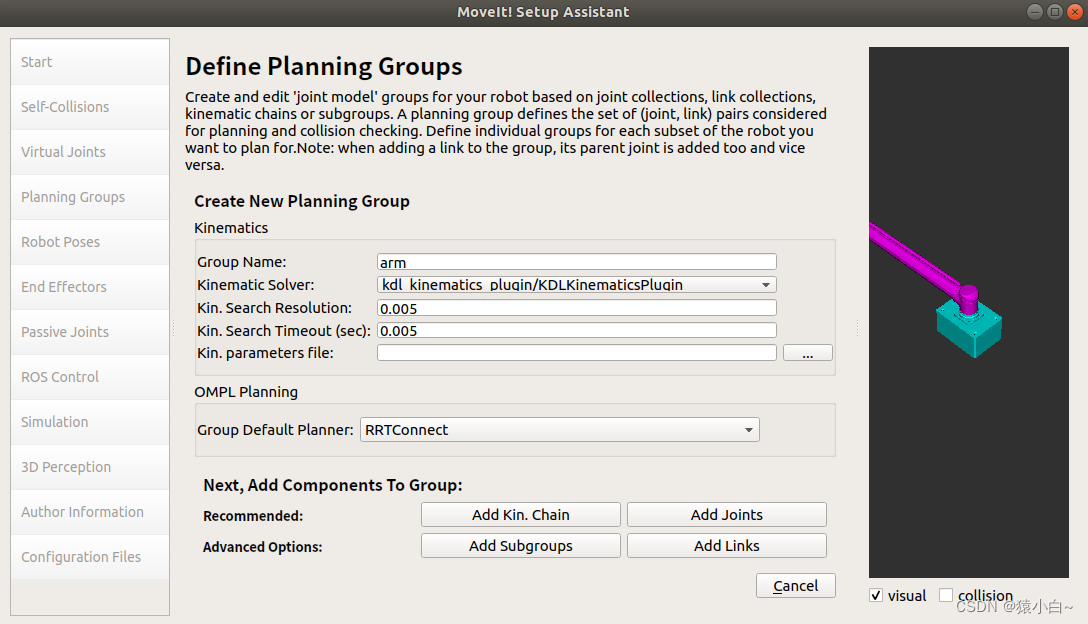
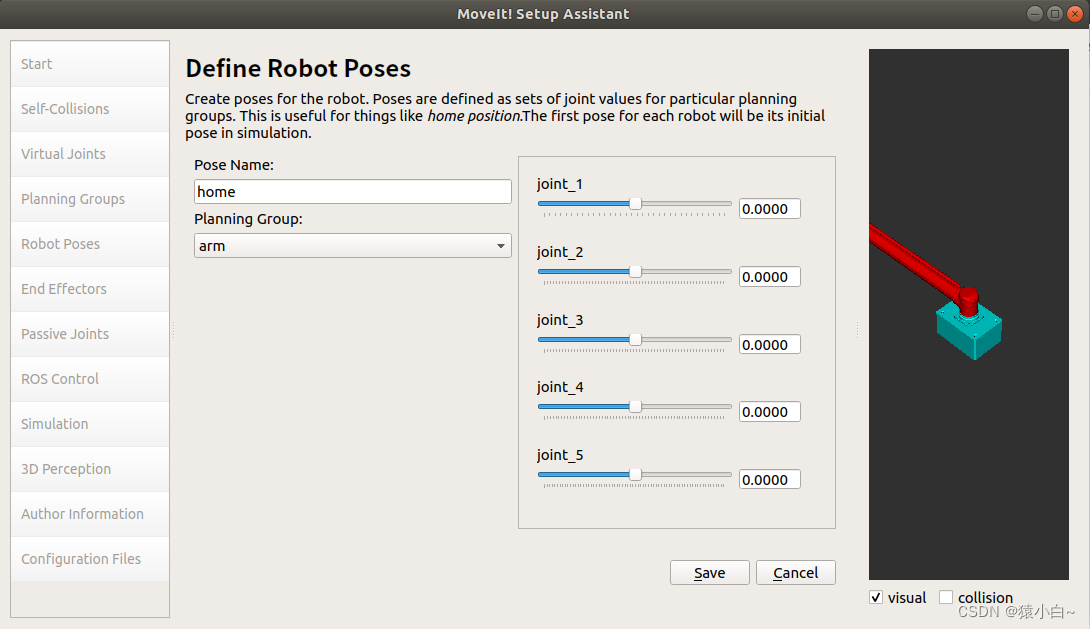
2.3 添加机械臂的位姿,这里可以在之后的控制中实现快速到达指定位置,我设置的是让各个关节都归零,位姿名称为home
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/703773
推荐阅读
相关标签

