
- 12024年HarmonyOS鸿蒙最全备考cisp拿证,收藏这一篇就够了(1),鸿蒙view的绘制流程面试_cisp复习资料
- 2java试卷练习1_若要给当前的程序添加一个包名,添加包名的语句关键字为: 应该放在程序的位置 为:
- 3利用 Selenium 和 Python 实现网页新闻链接抓取
- 4springCloud + eureka + zuul实现多版本控制和灰度发布_feign+eueka如何实现灰度
- 5Oracle的sql常用技巧_oracle sql解题技巧总结
- 6国家开放大学2021春1474临床医学概论(本)题目_国开临床医学概论
- 7大语言模型——语言模型的发展历程_大语言模型发展历程
- 8基于LLM+场景识别+词槽实体抽取实现多轮问答_llm 多轮对话
- 9Android自定义锁屏实现----仿正点闹钟滑屏解锁_android 滑动开锁效果
- 102025江苏科技大学计算机考研信息汇总_江苏科技大学大学计算机考研知乎2025
为实习准备的数据结构(11)-- 图论算法 集锦(1)_前端数据结构图论
赞
踩
这许许多多地铁站所组成的交通网络,也可以认为是数据结构当中的图。
图,是一种比树更为复杂的数据结构。树的节点之间是一对多的关系,并且存在父与子的层级划分;而图的顶点(注意,这里不叫节点)之间是多对多的关系,并且所有顶点都是平等的,无所谓谁是父谁是子。
定义一:有向图、无向图、权重、活用图
图是由顶点的有穷非空集合和顶点之间边的集合组成, 通常表示为: G(V,E), 其中,G表示一个图,V是图G中顶点的集合,E是图G中边的集合。
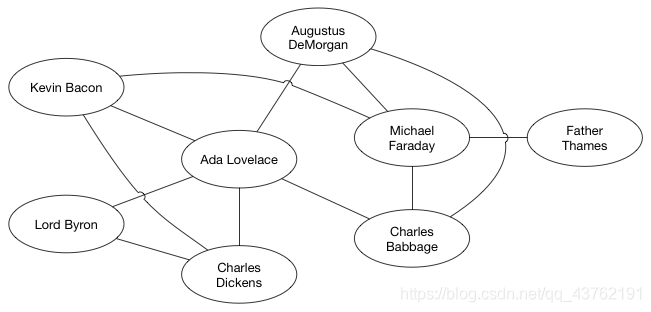
这种叫做无向图,里面的边叫做无向边。
图有各种形状和大小。边可以有权重(weight),即每一条边会被分配一个正数或者负数值。考虑一个代表航线的图。各个城市就是顶点,航线就是边。那么边的权重可以是飞行时间,或者机票价格。
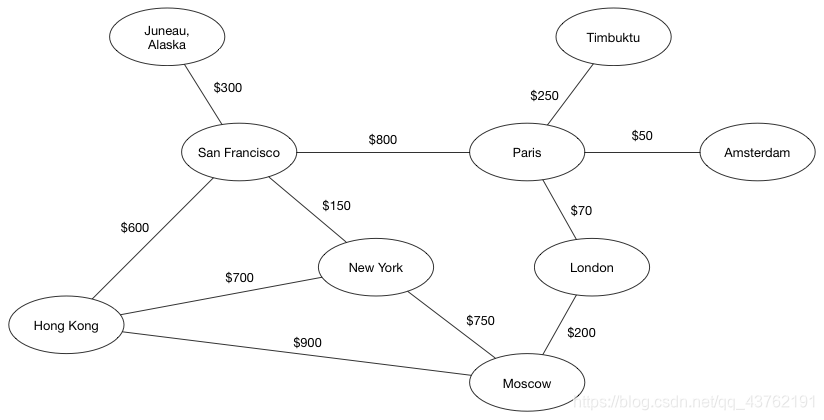
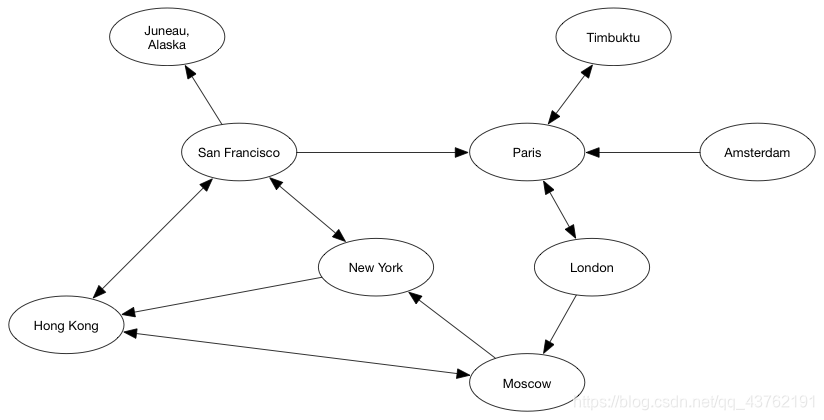
边可以是有方向的。在上面提到的例子中,边是没有方向的。有方向的边意味着是单方面的关系。
事实证明图是一种有用的数据结构。
如果你有一个编程问题可以通过顶点和边表示出来,那么你就可以将你的问题用图画出来,然后使用著名的图算法(比如广度优先搜索 或者 深度优先搜索)来找到解决方案。
离散数学中有不少这方面的栗子。
假设你有一系列任务需要完成,但是有的任务必须等待其他任务完成后才可以开始。你可以通过非循环有向图来建立模型:
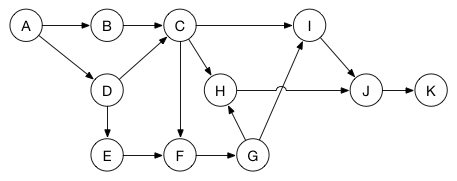
每一个顶点代表一个任务。两个任务之间的边表示目的任务必须等到源任务完成后才可以开始。比如,在任务B和任务D都完成之前,任务C不可以开始。在任务A完成之前,任务A和D都不能开始。
现在这个问题就通过图描述清楚了,你可以使用深度优先搜索算法来执行执行拓扑排序。这样就可以将所有的任务排入最优的执行顺序,保证等待任务完成的时间最小化。(这里可能的顺序之一是:A, B, D, E, C, F, G, H, I, J, K)
定义二:完全图、连通图、连通分量、生成树
在图中,若不存在顶点到其自身的边,且同一条边不重复出现,则称这样的图为简单图。目前讨论的都是简单图。在无向图中,如果任意两个顶点之间都存在边,则称该图为无向完全图。含有n个顶点的无向完全图有n*(n-1)/2条边。在有向图中,如果任意两个顶点之间都存在方向互为相反的两条弧,则称该图为有向完全图。含有n个顶点的有向完全图有n* (n-1) 条边。
在无向图G中,如果从顶点v到顶点v’有路径,则称v和v’是连通的。 如果对于图中任意两个顶点vi、vj ∈E, vi,和vj都是连通的,则称G是连通图。
无向图中的极大连通子图称为连通分量。注意连通分量的概念,它强调:
要是子图;
子图要是连通的;
连通子图含有极大顶点数;
具有极大顶点数的连通子图包含依附于这些顶点的所有边。
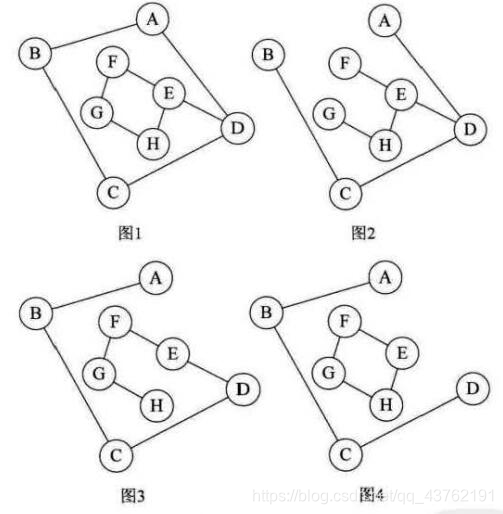
所谓的一个连通图的生成树是一个极小的连通子图, 它含有图中全部的n 个顶点,但只有足以构成一棵树的n-1条边。比如下图的图1是一普通图,但显然它不是生成树,当去掉两条构成环的边后,比如图2 或图3,就满足n个顶点n-1条边且连通的定义了, 它们都是一棵生成树。从这里也可知道,如果一个图有n 个顶点和小子n-1条边,则是非连通图,如果多于n-1 边条,必定构成一个环, 因为这条边使得它依附的那两个顶点之间有了第二条路径。比如图2 和图3,随便加哪两顶点的边都将构成环。 不过有n-1条边并不一定是生成树,比如图4。
定义三:邻接表、邻接矩阵
理论上,图就是一堆顶点和边对象而已,但是怎么在代码中来描述呢?
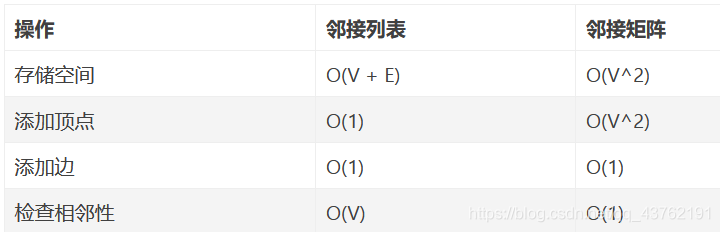
有两种主要的方法:邻接列表和邻接矩阵。
在邻接列表实现中,每一个顶点会存储一个从它这里开始的边的列表。比如,如果顶点A 有一条边到B、C和D,那么A的列表中会有3条边

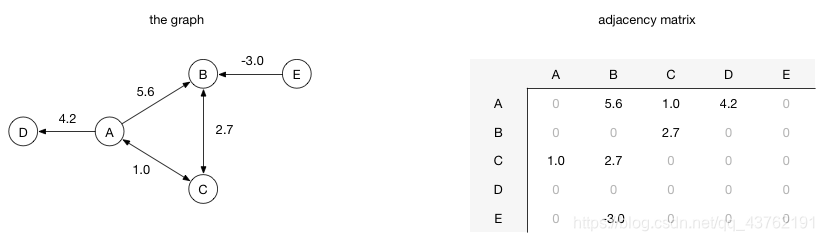
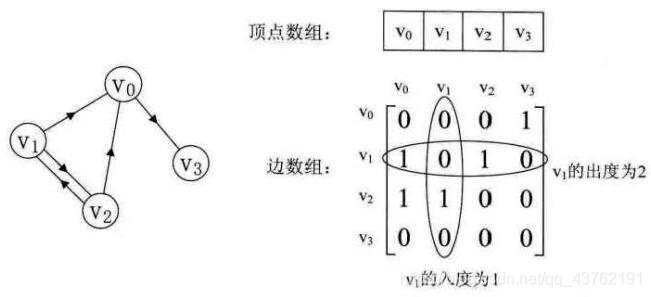
在邻接矩阵实现中,由行和列都表示顶点,由两个顶点所决定的矩阵对应元素表示这里两个顶点是否相连、如果相连这个值表示的是相连边的权重。例如,如果从顶点A到顶点B有一条权重为 5.6 的边,那么矩阵中第A行第B列的位置的元素值应该是5.6:
邻接列表只描述了指向外部的边。A 有一条边到B,但是B没有边到A,所以 A没有出现在B的邻接列表中。查找两个顶点之间的边或者权重会比较费时。
所以使用哪一个呢?大多数时候,选择邻接列表是正确的。下面是两种实现方法更详细的比较:
定义四:DFS、BFS
(1) 深度优先遍历(DFS)
a. 访问顶点v
b. 依次从v的未被访问的邻接点出发,对图进行深度优先遍历;直至图中和v有路径相通的顶点都被访问
c. 若此时图中尚有顶点未被访问,则从一个未被访问的顶点出发,重新进行深度优先遍历,直到图中所有顶点均被访问过为止
(2) 广度优先遍历(BFS)
a. 从图中某个顶点v出发,访问v
b. 依次访问v的各个未被访问过的邻接点
c. 分别从这些邻接点出发依次访问他们的邻接点
d. 重复步骤c,直至所有已被访问的顶点的邻接点都被访问到
定义五:Prim 算法、Kruskal 算法、Dijkstra 算法
Prim 算法
a. 以某一个点开始,寻找当前该点可以访问的所有的边
b. 在已经寻找的边中发现最小边,这个边必须有一个点还没有访问过,将还没有访问的点加入集合,记录添加的边
c. 寻找当前集合可以访问的所有边,重复 b 的过程,直到没有新的点可以加入
Kruskal 算法
a. 设一个有n个顶点的连通网络为 G(V,E),最初先构造一个只有 n 个顶点,没有边的非连通图 T,图中每个顶点自成一个连通分量
b. 当在E中选择一条具有最小权值的边时,若该边的两个顶点落在不同的连通分量上,则将此边加入到 T 中;否则重新选择一条权值最小的边
c. 如此重复下去,直到所有顶点在同一个连通分量上为止
Dijkstra 算法
a. 遍历与结点1相连的所有结点,找到距离最近的一个,把这个结点标记为访问过,并更新最短路径
b. 遍历最短路径包含的点相连的节点,找到距离最近的加入最短路径,并且标记为访问过
c. 重复 b 步骤
总结:先遍历一遍还没有在最短路径中的点,选出一个距离最近的点,把它加入到最短路径中并更新,直到所有的点都加入到最短路径中。
邻接表
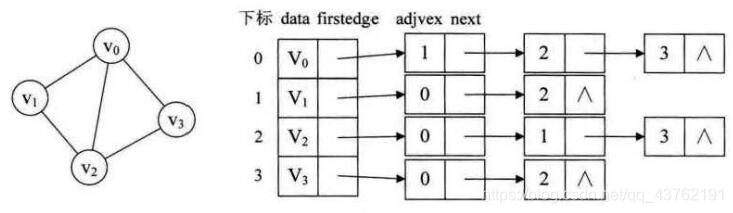
得拿俩栗子来看,不然看着晕晕的。
如图是一个无向图的连接表结构,有向图则类似。
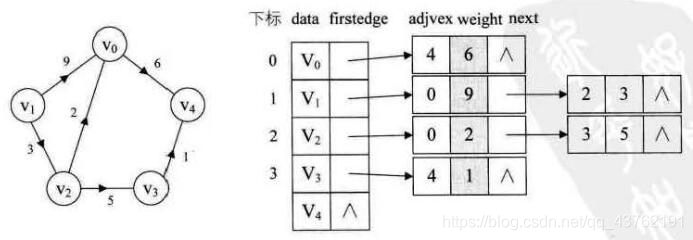
对于带权值的网图,可以在边表结点定义中再增加一个weight 的数据域,存储权值信息即可,如下图所示。
邻接表结点定义:
typedef char VertexType; /* 顶点类型应由用户定义 */
typedef int EdgeType; /* 边上的权值类型应由用户定义 */
typedef struct EdgeNode /* 边表结点 */
{
int adjvex; /* 邻接点域,存储该顶点对应的下标 */
EdgeType info; /* 用于存储权值,对于非网图可以不需要 */
struct EdgeNode next; / 链域,指向下一个邻接点 */
}EdgeNode;
typedef struct VertexNode /* 顶点表结点 */
{
VertexType data; /* 顶点域,存储顶点信息 */
EdgeNode firstedge;/ 边表头指针 */
}VertexNode, AdjList[MAXVEX];
typedef struct
{
AdjList adjList;
int numNodes,numEdges; /* 图中当前顶点数和边数 */
}GraphAdjList;
无向图的邻接表创建代码如下:
- 建立图的邻接表结构 */
void CreateALGraph(GraphAdjList *G)
{
int i,j,k;
EdgeNode *e;
printf(“输入顶点数和边数:\n”);
scanf(“%d,%d”,&G->numNodes,&G->numEdges); /* 输入顶点数和边数 */
for(i = 0;i < G->numNodes;i++) /* 读入顶点信息,建立顶点表 */
{
scanf(&G->adjList[i].data); /* 输入顶点信息 */
G->adjList[i].firstedge=NULL; /* 将边表置为空表 */
}
for(k = 0;k < G->numEdges;k++)/* 建立边表 */
{
printf(“输入边(vi,vj)上的顶点序号:\n”);
scanf(“%d,%d”,&i,&j); /* 输入边(vi,vj)上的顶点序号 */
e=(EdgeNode )malloc(sizeof(EdgeNode)); / 向内存申请空间,生成边表结点 */
e->adjvex=j; /* 邻接序号为j */
e->next=G->adjList[i].firstedge; /* 将e的指针指向当前顶点上指向的结点 */
G->adjList[i].firstedge=e; /* 将当前顶点的指针指向e */
e=(EdgeNode )malloc(sizeof(EdgeNode)); / 向内存申请空间,生成边表结点 */
e->adjvex=i; /* 邻接序号为i */
e->next=G->adjList[j].firstedge; /* 将e的指针指向当前顶点上指向的结点 */
G->adjList[j].firstedge=e; /* 将当前顶点的指针指向e */
}
}
邻接矩阵
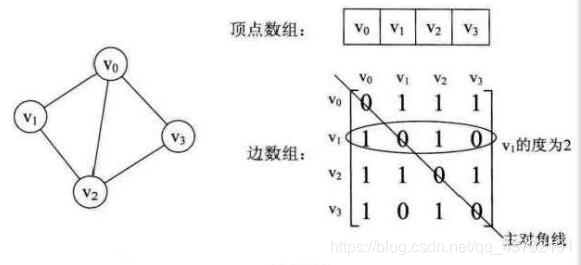
如下无向图,
如下有向图,
如下网图:

邻接矩阵结构:
#define OK 1
#define ERROR 0
#define TRUE 1
#define FALSE 0
#define MAXVEX 100 /* 最大顶点数,应由用户定义 */
#define INFINITY 65535
typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */
typedef char VertexType; /* 顶点类型应由用户定义 */
typedef int EdgeType; /* 边上的权值类型应由用户定义 */
typedef struct
{
VertexType vexs[MAXVEX]; /* 顶点表 */
EdgeType arc[MAXVEX][MAXVEX];/* 邻接矩阵,可看作边表 */
int numNodes, numEdges; /* 图中当前的顶点数和边数 */
}MGraph;
有了这个结构定义,我们构造一个图,其实就是给顶点表和边表输入数据的过程。我们来看看无向网图的创建代码。
/* 建立无向网图的邻接矩阵表示 */
void CreateMGraph(MGraph *G)
{
int i,j,k,w;
printf(“输入顶点数和边数:\n”);
scanf(“%d,%d”,&G->numNodes,&G->numEdges); /* 输入顶点数和边数 */
for(i = 0;i numNodes;i++) /* 读入顶点信息,建立顶点表 */
scanf(&G->vexs[i]);
for(i = 0;i numNodes;i++)
for(j = 0;j numNodes;j++)
G->arc[i][j]=INFINITY; /* 邻接矩阵初始化 */
for(k = 0;k numEdges;k++) /* 读入numEdges条边,建立邻接矩阵 */
{
printf(“输入边(vi,vj)上的下标i,下标j和权w:\n”);
scanf(“%d,%d,%d”,&i,&j,&w); /* 输入边(vi,vj)上的权w */
G->arc[i][j]=w;
G->arc[j][i]= G->arc[i][j]; /* 因为是无向图,矩阵对称 */
}
}
从代码中也可以得到,n 个顶点和e 条边的无向网图的创建,时间复杂度O(n^2)。
DFS:深度优先
如果使用邻接矩阵,代码如下:
Boolean visited[MAXVEX]; /* 访问标志的数组 */
/* 邻接矩阵的深度优先递归算法 */
void DFS(MGraph G, int i)
{
int j;
visited[i] = TRUE;
printf("%c ", G.vexs[i]);/* 打印顶点,也可以其它操作 */
for(j = 0; j < G.numVertexes; j++)
if(G.arc[i][j] == 1 && !visited[j])
DFS(G, j);/* 对为访问的邻接顶点递归调用 */
}
/* 邻接矩阵的深度遍历操作 */
void DFSTraverse(MGraph G)
{
int i;
for(i = 0; i < G.numVertexes; i++)
visited[i] = FALSE; /* 初始所有顶点状态都是未访问过状态 */
for(i = 0; i < G.numVertexes; i++)
if(!visited[i]) /* 对未访问过的顶点调用DFS,若是连通图,只会执行一次 */
DFS(G, i);
}
如果使用邻接表结构,代码如下:
Boolean visited[MAXSIZE]; /* 访问标志的数组 */
/* 邻接表的深度优先递归算法 */
void DFS(GraphAdjList GL, int i)
{
EdgeNode *p;
visited[i] = TRUE;
printf("%c ",GL->adjList[i].data);/* 打印顶点,也可以其它操作 */
p = GL->adjList[i].firstedge;
while§
{
if(!visited[p->adjvex])
DFS(GL, p->adjvex);/* 对为访问的邻接顶点递归调用 */
p = p->next;
}
}
/* 邻接表的深度遍历操作 */
void DFSTraverse(GraphAdjList GL)
{
int i;
for(i = 0; i < GL->numVertexes; i++)
visited[i] = FALSE; /* 初始所有顶点状态都是未访问过状态 */
for(i = 0; i < GL->numVertexes; i++)
if(!visited[i]) /* 对未访问过的顶点调用DFS,若是连通图,只会执行一次 */
DFS(GL, i);
}
BFS:广度优先
如果说图的深度优先遍历类似树的前序遍历, 那么图的广度优先遍历就类似于树的层序遍历了。
以下是邻接矩阵结构的广度优先遍历算法:
/* 邻接矩阵的广度遍历算法 */
void BFSTraverse(MGraph G)
{
int i, j;
Queue Q;
for(i = 0; i < G.numVertexes; i++)
visited[i] = FALSE;
InitQueue(&Q); /* 初始化一辅助用的队列 */
for(i = 0; i < G.numVertexes; i++) /* 对每一个顶点做循环 */
{
if (!visited[i]) /* 若是未访问过就处理 */
{
visited[i]=TRUE; /* 设置当前顶点访问过 */
printf("%c ", G.vexs[i]);/* 打印顶点,也可以其它操作 */
EnQueue(&Q,i); /* 将此顶点入队列 */
while(!QueueEmpty(Q)) /* 若当前队列不为空 */
{
DeQueue(&Q,&i); /* 将队对元素出队列,赋值给i */
for(j=0;j<G.numVertexes;j++)
{
/* 判断其它顶点若与当前顶点存在边且未访问过 */
if(G.arc[i][j] == 1 && !visited[j])
{
visited[j]=TRUE; /* 将找到的此顶点标记为已访问 */
printf("%c ", G.vexs[j]); /* 打印顶点 */
EnQueue(&Q,j); /* 将找到的此顶点入队列 */
}
}
}
}
}
}
对于邻接表的广度优先遍历,代码与邻接矩阵差异不大,代码如下:
/* 邻接表的广度遍历算法 */
void BFSTraverse(GraphAdjList GL)
{
int i;
EdgeNode *p;
Queue Q;
for(i = 0; i < GL->numVertexes; i++)
visited[i] = FALSE;
InitQueue(&Q);
for(i = 0; i < GL->numVertexes; i++)
{
if (!visited[i])
{
visited[i]=TRUE;
printf("%c ",GL->adjList[i].data);/* 打印顶点,也可以其它操作 */
EnQueue(&Q,i);
while(!QueueEmpty(Q))
{
DeQueue(&Q,&i);
p = GL->adjList[i].firstedge; /* 找到当前顶点的边表链表头指针 */
while§
{
if(!visited[p->adjvex]) /* 若此顶点未被访问 */
{
visited[p->adjvex]=TRUE;
printf("%c ",GL->adjList[p->adjvex].data);
EnQueue(&Q,p->adjvex); /* 将此顶点入队列 */
}
p = p->next; /* 指针指向下一个邻接点 */
}
}
}
}
}
这俩算法倒是在运筹学里学过。
Prim算法
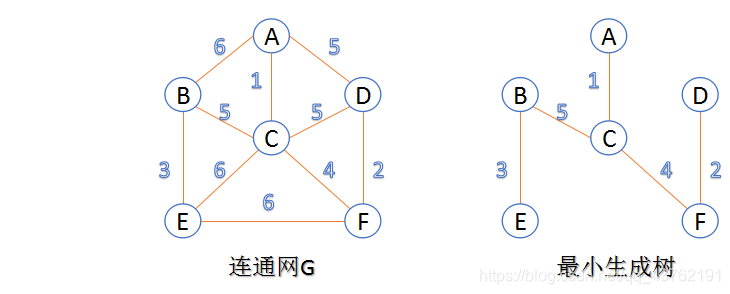
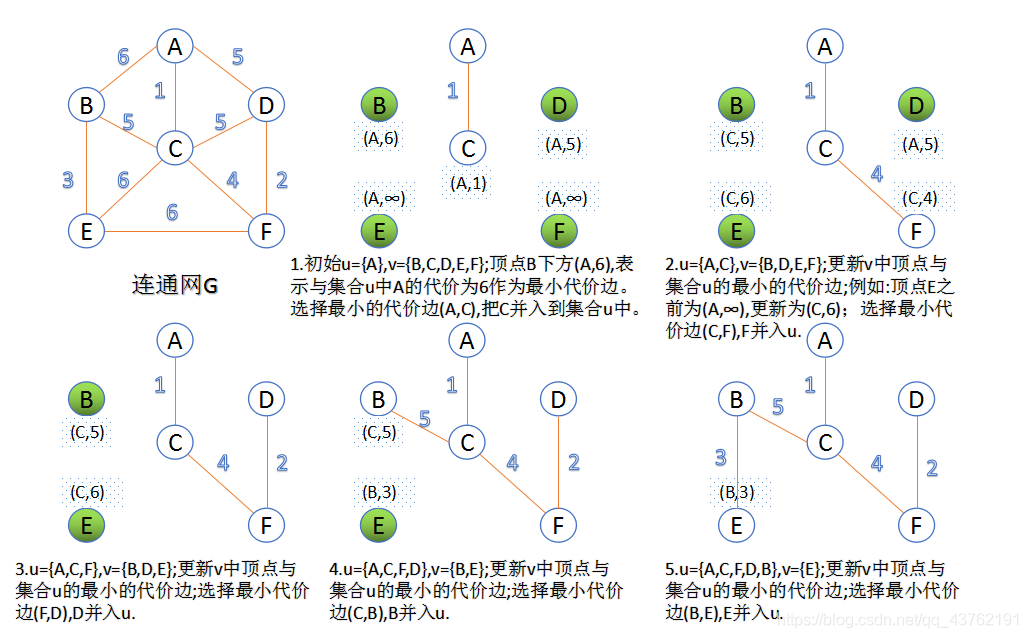
此算法可以称为“加点法”,每次迭代选择代价最小的边对应的点,加入到最小生成树中。算法从某一个顶点s开始,逐渐长大覆盖整个连通网的所有顶点。
1、图的所有顶点集合为V;初始令集合u={s},v=V−u;
2、在两个集合u,v能够组成的边中,选择一条代价最小的边(u0,v0),加入到最小生成树中,并把v0并入到集合u中。
3、重复上述步骤,直到最小生成树有n-1条边或者n个顶点为止。
(先将图构造成一个邻接矩阵G)
/* Prim算法生成最小生成树 */
void MiniSpanTree_Prim(MGraph G)
{
int min, i, j, k;
int adjvex[MAXVEX]; /* 保存相关顶点下标 */
int lowcost[MAXVEX]; /* 保存相关顶点间边的权值 */
lowcost[0] = 0;/* 初始化第一个权值为0,即v0加入生成树 */
/* lowcost的值为0,在这里就是此下标的顶点已经加入生成树 */
adjvex[0] = 0; /* 初始化第一个顶点下标为0 */
for(i = 1; i < G.numVertexes; i++) /* 循环除下标为0外的全部顶点 */
{
lowcost[i] = G.arc[0][i]; /* 将v0顶点与之有边的权值存入数组 */
adjvex[i] = 0; /* 初始化都为v0的下标 */
}
for(i = 1; i < G.numVertexes; i++)
{
min = INFINITY; /* 初始化最小权值为∞, */
/* 通常设置为不可能的大数字如32767、65535等 */
j = 1;k = 0;
while(j < G.numVertexes) /* 循环全部顶点 */
{
if(lowcost[j]!=0 && lowcost[j] < min)/* 如果权值不为0且权值小于min */
{
min = lowcost[j]; /* 则让当前权值成为最小值 */
k = j; /* 将当前最小值的下标存入k */
}
j++;
}
printf(“(%d, %d)\n”, adjvex[k], k);/* 打印当前顶点边中权值最小的边 */
lowcost[k] = 0;/* 将当前顶点的权值设置为0,表示此顶点已经完成任务 */
for(j = 1; j < G.numVertexes; j++) /* 循环所有顶点 */
{
if(lowcost[j]!=0 && G.arc[k][j] < lowcost[j])
{/* 如果下标为k顶点各边权值小于此前这些顶点未被加入生成树权值 */
lowcost[j] = G.arc[k][j];/* 将较小的权值存入lowcost相应位置 */
adjvex[j] = k; /* 将下标为k的顶点存入adjvex */
}
}
}
}
Kruskal算法
此算法可以称为“加边法”,初始最小生成树边数为0,每迭代一次就选择一条满足条件的最小代价边,加入到最小生成树的边集合里。
- 把图中的所有边按代价从小到大排序;
- 把图中的n个顶点看成独立的n棵树组成的森林;
- 按权值从小到大选择边,所选的边连接的两个顶点ui,vi,应属于两颗不同的树,则成为最小生成树的一条边,并将这两颗树合并作为一颗树。
- 重复(3),直到所有顶点都在一颗树内或者有n-1条边为止。

typedef struct
{
int begin;
int end;
int weight;
}Edge; /* 对边集数组Edge结构的定义 */
/* 生成最小生成树 */
void MiniSpanTree_Kruskal(MGraph G)
{
int i, j, n, m;
int k = 0;
int parent[MAXVEX];/* 定义一数组用来判断边与边是否形成环路 */
Edge edges[MAXEDGE];/* 定义边集数组,edge的结构为begin,end,weight,均为整型 */
/* 用来构建边集数组并排序********************* */
for ( i = 0; i < G.numVertexes-1; i++)
{
for (j = i + 1; j < G.numVertexes; j++)
{
if (G.arc[i][j]<INFINITY)
{
edges[k].begin = i;
edges[k].end = j;
edges[k].weight = G.arc[i][j];
k++;
}
}
}
sort(edges, &G);
/* ******************************************* */
for (i = 0; i < G.numVertexes; i++)
parent[i] = 0; /* 初始化数组值为0 */
printf(“打印最小生成树:\n”);
for (i = 0; i < G.numEdges; i++) /* 循环每一条边 */
{
n = Find(parent,edges[i].begin);
m = Find(parent,edges[i].end);
if (n != m) /* 假如n与m不等,说明此边没有与现有的生成树形成环路 */
{
parent[n] = m; /* 将此边的结尾顶点放入下标为起点的parent中。 */
/* 表示此顶点已经在生成树集合中 */
printf(“(%d, %d) %d\n”, edges[i].begin, edges[i].end, edges[i].weight);
}
}
}
克鲁斯卡尔算法主要是针对边来展开,边数少时效率会非常高,所以对于稀疏图有很大的优势; 而普里姆算法对于稠密图,即边数非常多的情况会更好一些。
对于网图来说,最短路径,是指两顶点之间经过的边上权值之和最少的路径,并且我们称路径上的第一个顶点是源点,最后一个顶点是终点。关于最短路径主要有两种算法,迪杰斯特拉(Dijkstra) 算法和弗洛伊德(Floyd) 算法。
这俩算法在运筹学中也学了。
Dijkstra 算法
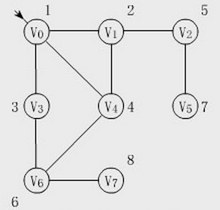
文字解释枯燥无味,我选择看图:(求解节点“1”到其他所有节点的最短路径)
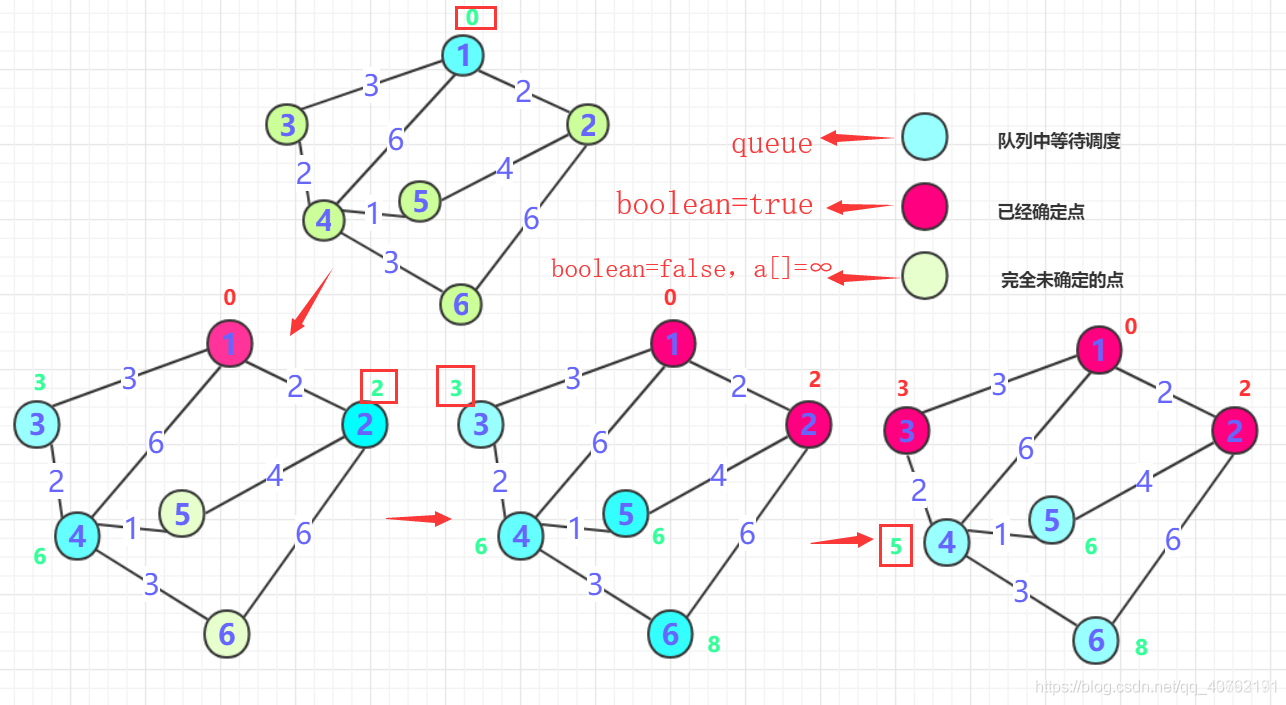
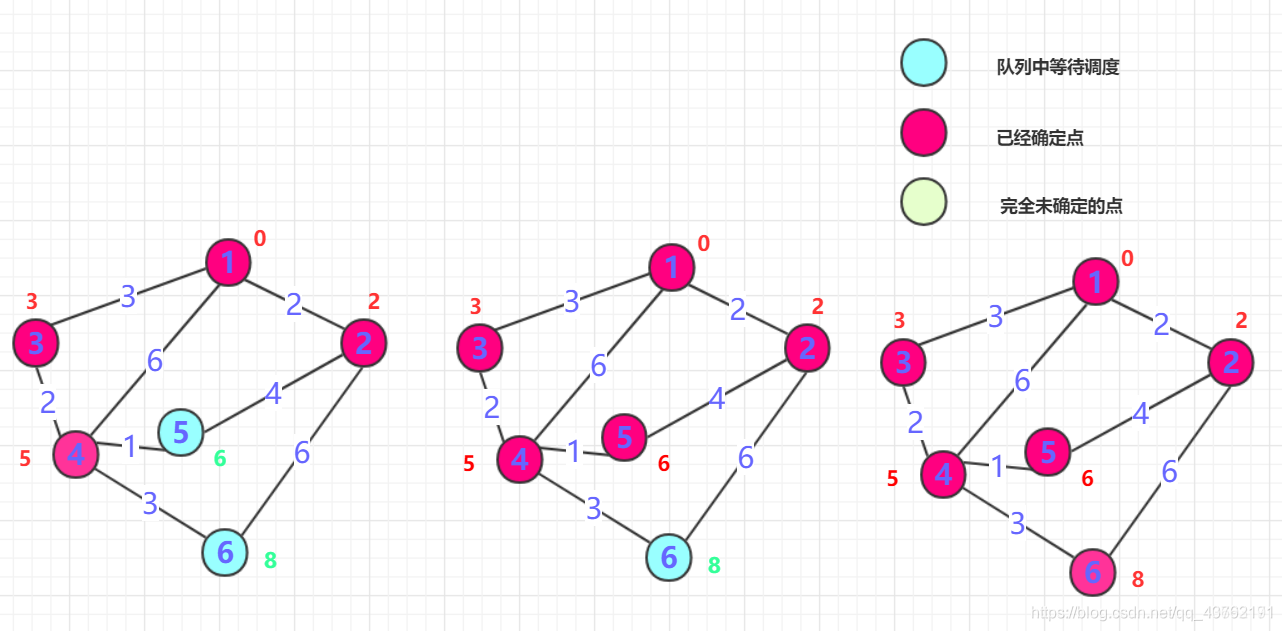
这是我能找到的最容易理解的图了,其他图文讲的讳莫如深,我不喜欢。
上面这两张理解完,再重新看一套,上面这两张是用来了解一下啥是迪杰斯特拉算法,接下来这套是用来写代码的:
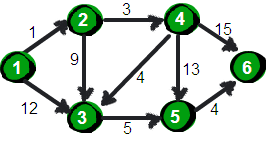
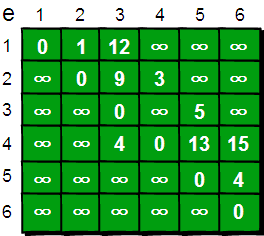

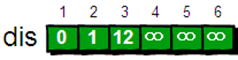
下面我们来模拟一下:
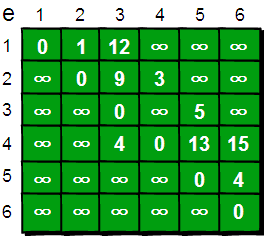
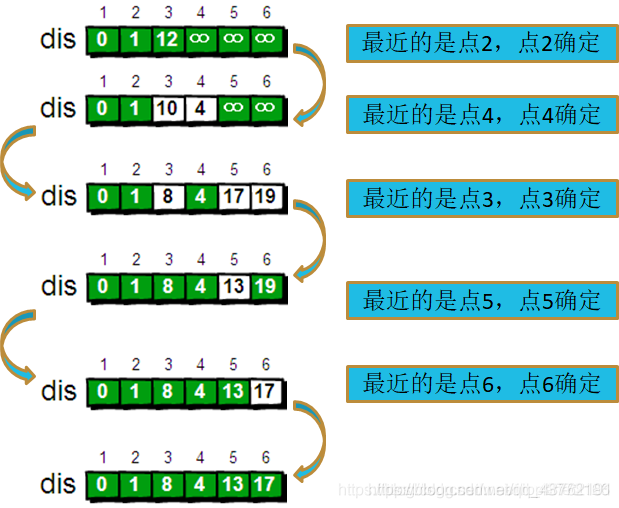
直接看这套的时候,会有点晕,不过有前面那套的铺垫,就好多了。
#include
#include
using namespace std;
const int INF = 0x3f3f3f3f, N = 205;
int ma[N][N];
int dis[N];
bool vis[N];
int n, m, st, ed;
void init()
{
// 初始化ma数组
for (int i = 0; i < n; i++)
for (int j = 0; j < n; j++)
ma[i][j] = (i == j ? 0 : INF);
}
void Dijk()
{
for (int i = 0; i < n - 1; i++){
int minv = INF, k; // k用来存储最小的且没被松弛过的城市
for (int j = 0; j < n; j++){
if (minv > dis[j] && !vis[j]){
minv = dis[j];
k = j;
}
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Java工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则几千的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年Java开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Java开发知识点,真正体系化!
由于文件比较大,这里只是将部分目录截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且会持续更新!
如果你觉得这些内容对你有帮助,可以扫码获取!!(备注Java获取)

Kafka实战笔记
关于这份笔记,为了不影响大家的阅读体验,我只能在文章中展示部分的章节内容和核心截图

- Kafka入门
- 为什么选择Kafka
- Karka的安装、管理和配置

- Kafka的集群
- 第一个Kafka程序

afka的生产者

- Kafka的消费者
- 深入理解Kafka
- 可靠的数据传递


- Spring和Kalka的整合
- Sprinboot和Kafka的整合
- Kafka实战之削峰填谷
- 数据管道和流式处理(了解即可)

- Kafka实战之削峰填谷

《互联网大厂面试真题解析、进阶开发核心学习笔记、全套讲解视频、实战项目源码讲义》点击传送门即可获取!
轻大家的负担。**[外链图片转存中…(img-Dgh75lj6-1713460653445)]
[外链图片转存中…(img-x9lxng0u-1713460653446)]
[外链图片转存中…(img-x8XZM38c-1713460653446)]
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Java开发知识点,真正体系化!
由于文件比较大,这里只是将部分目录截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且会持续更新!
如果你觉得这些内容对你有帮助,可以扫码获取!!(备注Java获取)
Kafka实战笔记
关于这份笔记,为了不影响大家的阅读体验,我只能在文章中展示部分的章节内容和核心截图
[外链图片转存中…(img-NTxku2Zb-1713460653446)]
- Kafka入门
- 为什么选择Kafka
- Karka的安装、管理和配置
[外链图片转存中…(img-RGTjOWt8-1713460653447)]
- Kafka的集群
- 第一个Kafka程序
- [外链图片转存中…(img-0OYlvBGX-1713460653447)]
afka的生产者
[外链图片转存中…(img-0y03gaQP-1713460653447)]
- Kafka的消费者
- 深入理解Kafka
- 可靠的数据传递
[外链图片转存中…(img-HNnbLhCF-1713460653448)]
[外链图片转存中…(img-ct1A6yWh-1713460653448)]
- Spring和Kalka的整合
- Sprinboot和Kafka的整合
- Kafka实战之削峰填谷
- 数据管道和流式处理(了解即可)
[外链图片转存中…(img-Dwr8ZyTK-1713460653448)]
- Kafka实战之削峰填谷
[外链图片转存中…(img-3PsndmE6-1713460653448)]
《互联网大厂面试真题解析、进阶开发核心学习笔记、全套讲解视频、实战项目源码讲义》点击传送门即可获取!

