
- 1产品Axure的元组件以及案例_axure组件
- 2OpenCV图像处理技术之图像直方图_equr
- 3YOLO-World_yolo world
- 4微信支付 —— 公众号支付代码详解_nansystem:access_denied
- 5ubuntu安装完tensorrt后在conda虚拟环境调用_conda env no module named 'tensorrt
- 6NLP 自然语言处理实战_nlp项目实战
- 7重新认识快手:人工智能的从 0 到 1
- 8优化篇--vxe-table 大数据表格替代方案_vxetable性能
- 9CSS之margin塌陷问题_css margin塌陷
- 10【物联网天线选择攻略】2.4GHz 频段增益天线模块设备选择_物联网模块一定要有天线吗
文献学习-1-医疗干预中的连续体机器人_continuum robots for medical interventions
赞
踩
Chapt 5. 连续体机构分析
5.1 文献学习
5.1.1 Continuum Robots for Medical Interventions
Authors: PIERRE E. DUPONT , Fellow IEEE, NABIL SIMAAN , Fellow IEEE,
HOWIE CHOSET , Fellow IEEE, AND CALEB RUCKER , Member IEEE
连续体机器人在医学上得到了广泛的应用,因为它们可以被设计成实现高长宽比,使它们非常适合微创和腔内医疗干预。这些机器人被定义为由可变形的细长元素组成,形成一个平滑弯曲的结构,其形状主要通过弯曲、相对平移、线性延伸和延伸元素的扭曲来控制。这些连续变形的结构有无限数量的自由度,但控制它们形状的运动学输入的数量通常很小。虽然连续体机器人缺乏离散关节,但它们的曲线形状可以用具有大量连续连接的离散关节的蛇形机器人设计来近似。连续体机器人与这种蛇状离散连接设计一起组成了一组运动学超冗余机器人。
1. 连续体机器人的设计分类
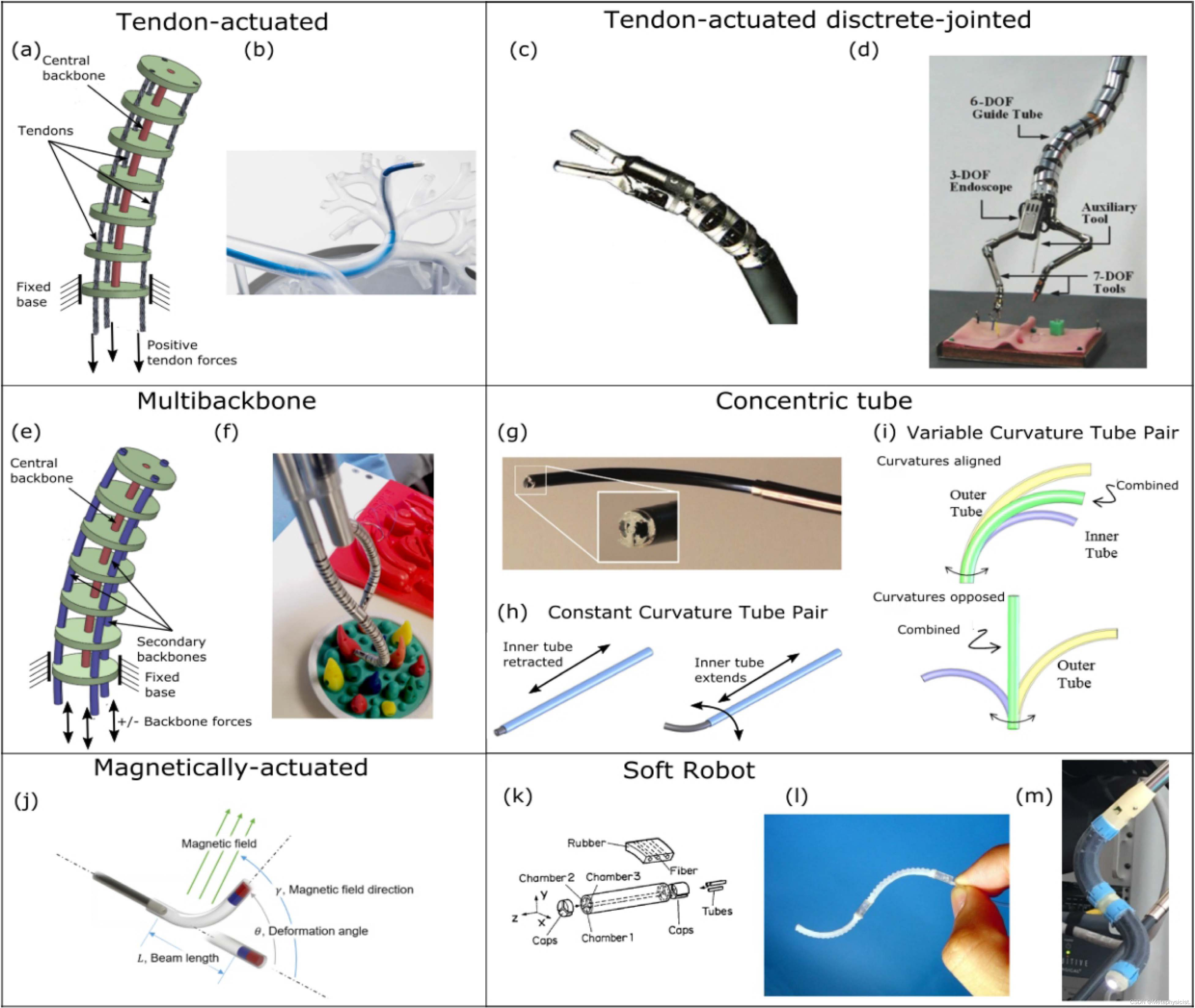
连续体机器人的设计主要可以通过形状控制的方法进行分类。虽然下面定义了五个主要的设计类,但许多混合设计可能包含了几个设计类的各个方面。
- 肌腱驱动设计:连续体机器人的结构延长元件的形状控制通常是通过额外的变形诱导延长元件实现的,这些延长元件专门用于施加力和扭矩到结构延长元件上。
基于肌腱的设计,如图1(a)和(b)所示,是最常用的形状控制方法。在这种设计中,结构延长元件是一根相对刚性纵向但具有弯曲性的管状物。施加在管道近端的肌腱上的张力会使其弯曲。 由于肌腱在弯曲时具有很高的柔顺性,整体的弯曲刚度就是管道的刚度。 常见的设计变化包括沿着长度变化的管道刚度,以便在特定区域(例如尖端)局部弯曲。 - 肌腱驱动的离散关节设计:肌腱驱动也用于控制(非连续体)超冗余的离散关节设计,例如图1 (c)和(d)所示的示例。与肌腱驱动的连续体设计相比,这些设计可能提供更高的刚度和较低的制造成本。
- 多主干设计:在这些设计中(图1(e)和(f)),细长元件既充当结构组件又充当诱导变形的组件。例如,在图1(e)的“多主干”设计中,中央元件充当纯粹的结构组件,而周围的元件(管道或具有弯曲刚度的线缆替代图1(a)的肌腱)既是结构组件又通过在基座处施加拉伸和压缩载荷诱导变形。这种设计可以提供比肌腱驱动更高的刚度。
- 同心管设计:图1(a)–(f)中的肌腱和多骨架设计依赖于延长元素在其远端相互连接。另一类连续体机器人放弃了这种刚性连接,而是通过预曲率来诱导其他元素的弯曲,从而控制整体形状。这些设计被称为同心管机器人。如图1(g)所示,它们由一组预曲管插入到彼此之中。组装管的整体形状通过在其近端相对于彼此进行平移和旋转来控制。这些机器人通常构建为具有恒定或变化曲率的伸缩段。这些部分类型在图1(h)和(i)中定义。 最近对这种设计策略的变化包括偏心排列一些或所有预曲元素。
- 磁驱动设计:在上述设计中,通过在机器人的近端施加位移或力矩来实现形状控制。这使得这些机器人在长度上更加纤细,并且比那些在长度上定位离散关节和电机的机器人设计更容易进行消毒。一种可以进一步减小机器人直径的替代设计策略是使用患者外部产生的磁场来控制机器人的形状,如图1(j)。这些磁场可以通过电磁铁、永磁体甚至是MRI扫描仪来产生。这种方法非常适用于需要特别长的医疗应用机器人,例如一米长的内腔手术。外部磁场作用于机器人尖端的铁磁材料,使其朝着期望的方向弯曲,同时其插入长度在基座处受到机械控制。
- 软体机器人设计:连续体机器人的结构和变形引起的延长元素通常由金属、聚合物及其组合物组成。另一种方法是完全使用橡胶材料构建机器人,并通过在延长元素内部加入气动或液压腔室来实现形状变化。这种设计被称为“软体机器人”,是连续体机器人的一个子集。这些机器人的设计策略可以与非软体连续体机器人相类似。例如,图1(k)显示了肌腱/多骨架的软体类比。
2.使用连续体结构设计医疗机器人
在医疗程序中,连续体机器人被用于最小化到达干预部位时产生的创伤。 这可能涉及减小通过健康组织的手术通道的直径,或者可能涉及经皮穿刺或通过自然孔道进入体腔。为此,评估机器人的侵入性是计算其插入长度除以其直径的比值,其中较大的比率等于侵入性较小的比值,定义为长细比s,它相似但不等于分析柱屈曲时定义的量。
随着这个比例的增加,悬臂结构中的弯曲尖端顺应性呈立方体增长,而用这里描述的任何一种结构构造的机器人都无法支持其自身的重量。这一限制导致了图2中所示的医疗连续体机器人的三种实现。第一种类型的图2(a)(可操纵)提供了沿其整个插入长度的主动形状控制。虽然这种设计是最通用的,但它仅限于长细比小于约50左右。
为了实现更大的长细比,可以将可操纵连续体机器人安装在直且相对刚性轴的远端,如图2(b)所示。该设计保持可操纵部分的长细比小于50,而整个插入长度的长细比可以在100左右。
然而,为了实现腔内操作,可操纵连续机器人可以安装在被动柔性管的尖端,如图2(c)所示。采用这种方法,长细比为1500是标准的。而近端柔性部分符合周围组织的形状,这种相互作用足够坚硬,以使可操纵的尖端能够在管腔内定位和定向。
对于所有三种实现,机器人自由度包括基底插入/收缩和旋转以及可操纵部分的自由度。
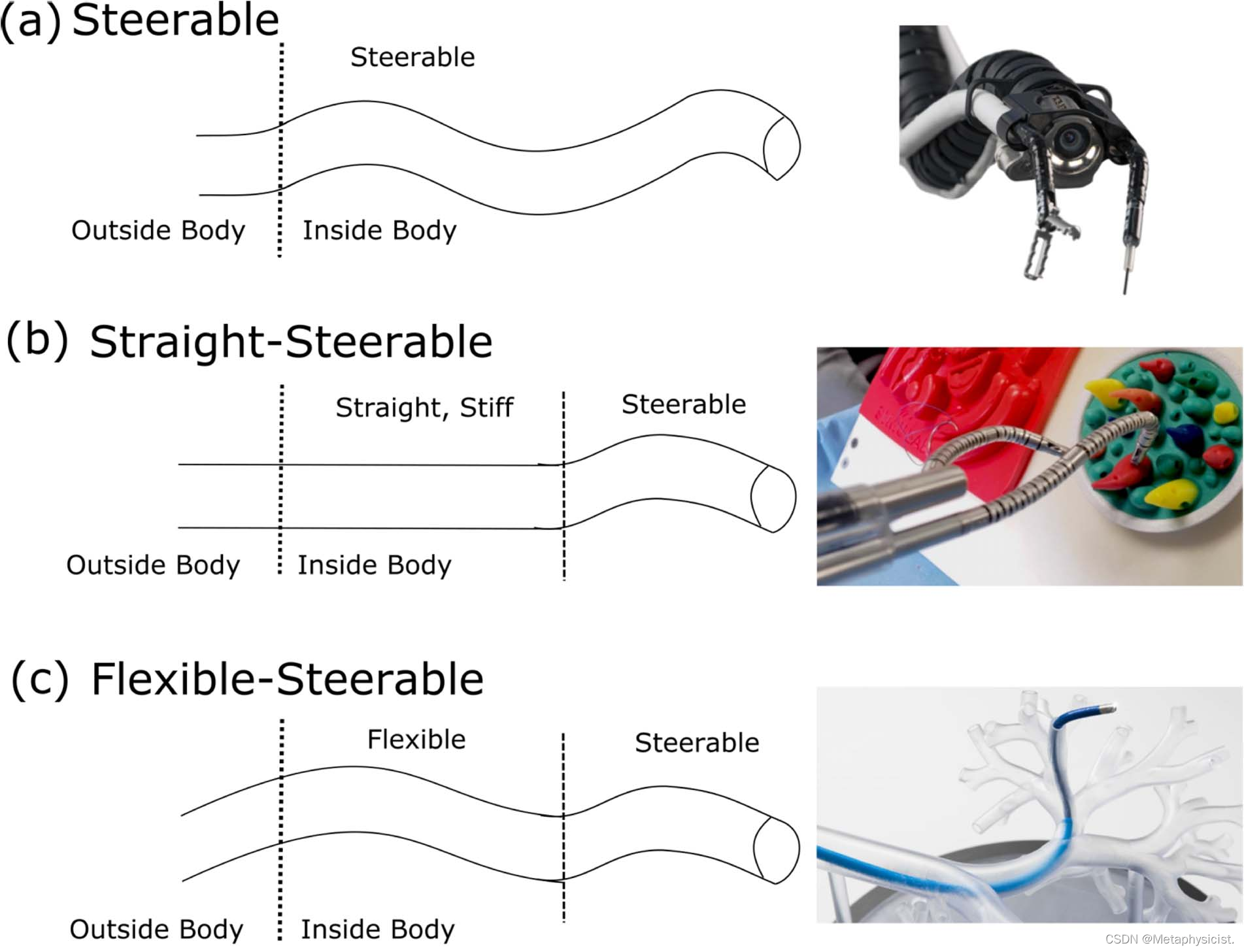
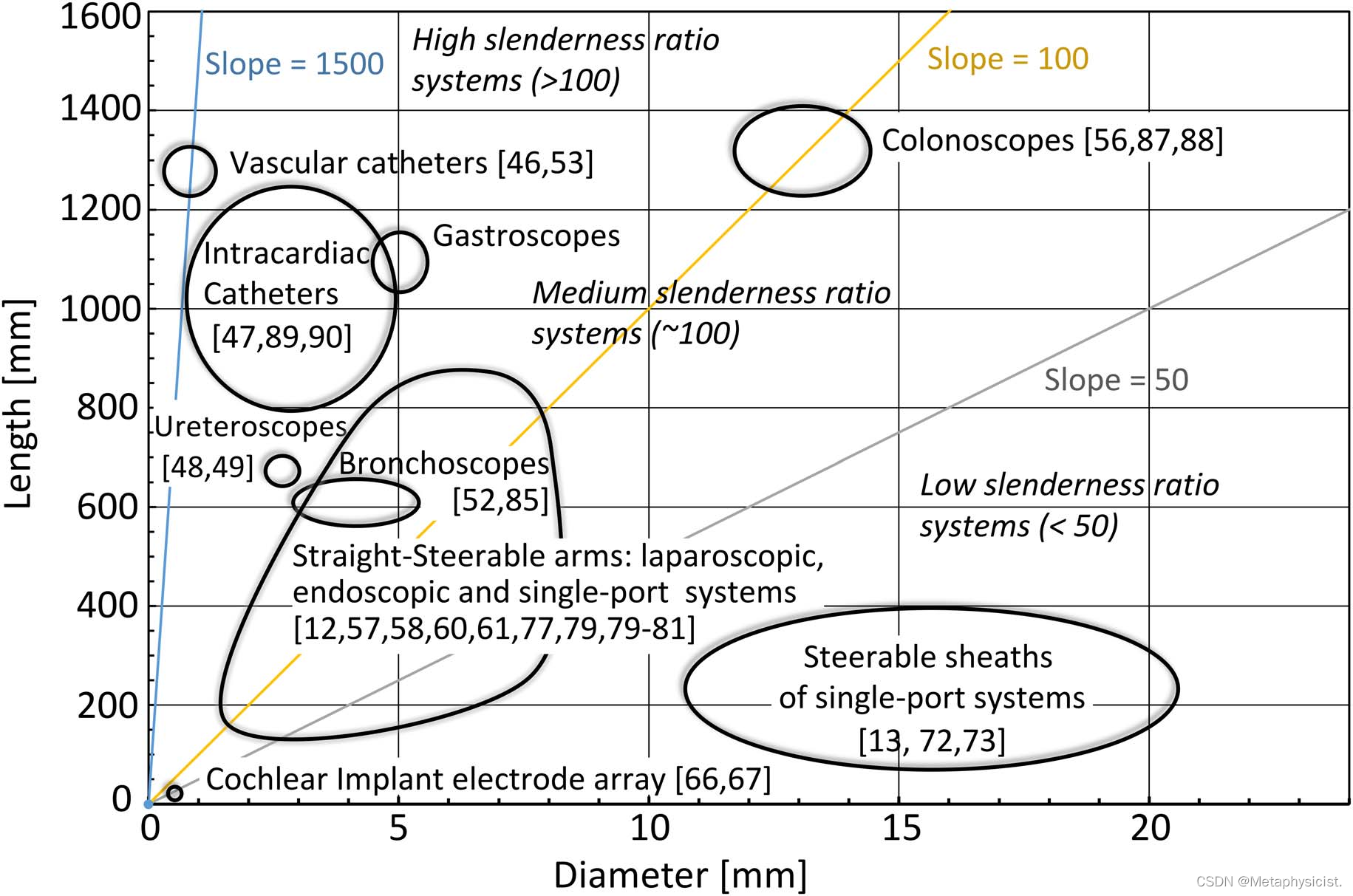
图3绘制了标准类医疗器械和连续体机器人的长细比的关系,于是有以下三类:
1)高长细比(柔性可操纵系统):柔性可操纵设计对应于可操纵导管、输尿管镜、支气管镜、胃镜和支气管镜。这些设备早于医疗机器人,并被开发为手动腔内仪器,作为一些最具侵入性的手术的替代方案。使这些设备成为机器人并不一定会增加新的自由度,也不一定会减少侵入性,但可以促进控制、规划的集成和传感,同时也提供改进的人体工程学。可操纵的血管内导管用于导航血管分叉、修复心脏瓣膜和治疗心律失常。这些设备的典型长度可达1.25米,直径从1到5毫米,其长细比为200-1250。
2)中等长细比(直操纵系统):直操纵连续体机器人设计常被用于取代手动腹腔镜和内窥镜工具,这些工具由一个直轴组成,但在尖端缺乏可操纵性。这些机器人通常通过尖端的可操纵性来增加自由度。例如,直觉外科公司的达·芬奇机器人的直柄工具的一个关键特征是尖端安装的手腕。标准的直径为8毫米直径的器械使用了由离散的旋转关节组成的手腕,而直径为5毫米的器械采用了肌腱驱动的蛇状设计[见图1(c)]。这些插入器械的长度约为50厘米,其长细比为100。
3)低长细比(可操纵系统):由于长细比小于约50,因此可以使整个插入的机器人长度可操纵。这种方法可以应用于,例如,在一个单端口或内镜手术系统的直鞘。这种结构在单端口过程中提供了更大的尖端方向控制,同时也使身体孔内部更深的笔记程序。例如,医疗机器人公司的可操纵的鞘。Flex系统[见图2(a)] 和三星的机器人[见图1(d)] 。由于尖端安装的手臂需要沿着护套被引导时的近端长度弯曲,手臂通常采用灵活操纵的设计。由于可操纵鞘长度的限制,这些臂的长细比与直鞘使用的长细比相当。
3.连续体机器人的建模
连续体机器人行为的数学模型一直是设计、规划、控制和传感的关键部分。第一个和最基本的模型是纯粹的运动学(只处理机器人形状和准静态运动),但模型另外处理材料行为(力学模型),外力(运动模型),和惯性效应(动力模型)现在已经被纳入设计和控制由于他们能够预测有用的方面的性能,如输出刚度。这些建模工作通常类似于传统刚性连杆机器人模型建立的模型公式,但由于其连续和灵活的结构,有一些重要的差异。
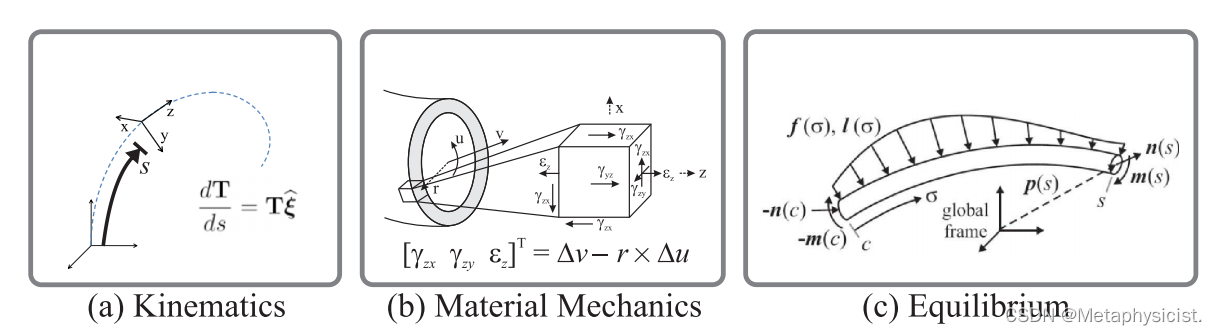
连续体机器人模型是围绕着三个主要组成部分建立的。(a)运动学将曲率与机器人的位置和方向联系起来。(b)本构材料定律将应力与应变联系起来,将内力与运动学联系起来。©平衡方程平衡了机器人的内外负荷。连续体机器人建模工作可以根据这些部分的选择进行分类。
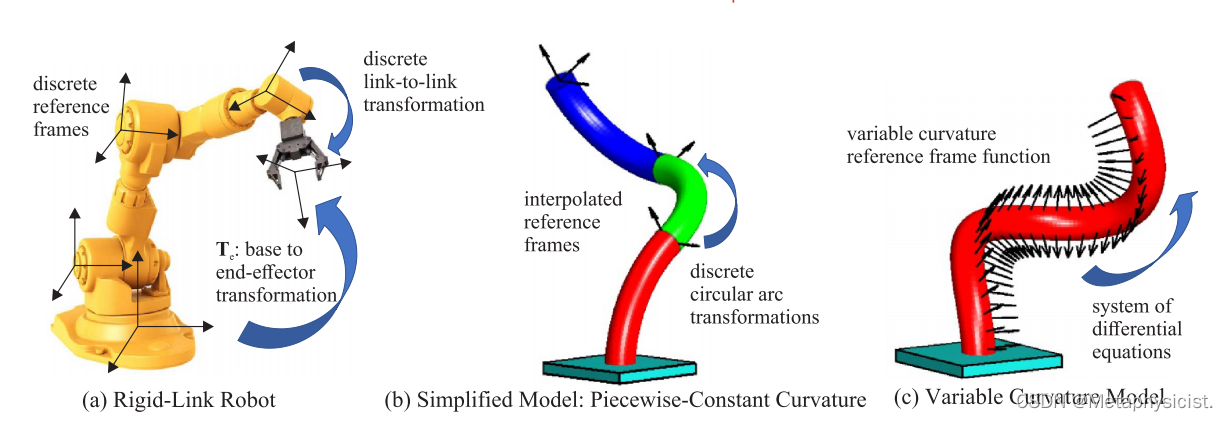
A. Rigid-Link Robot Kinematics 刚性连杆机器人运动学
刚性链接机器人动力学计算使用坐标系附加到每个机器人关节。末端执行器的坐标系与基坐标系相关,常用的方法有D-H法以及螺旋理论法。
B. Continuum Robot Kinematics 连续体机器人运动学
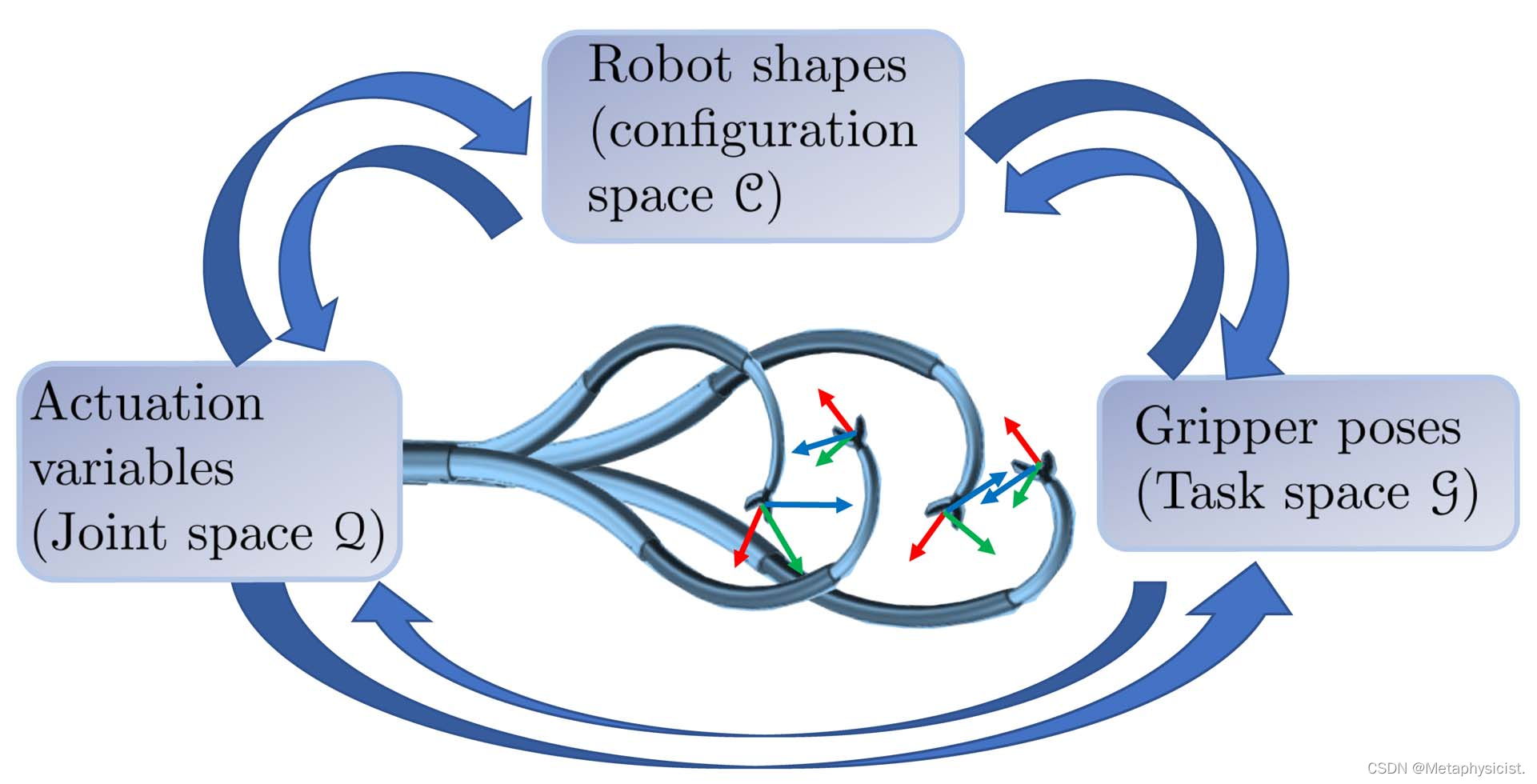
不管连续体机器人的设计如何,都有涉及以下三个空间的映射。
1)关节空间:在机器人的设计约束范围内,所有可能的执行器值的集合。
2)配置空间:所有可能可达到的形状的集合。
3)任务空间:可达的末端执行器姿态(位置和方向)的集合。
与刚性链接机器人不同,连续体机器人在整个长度上连续改变形状,而不是将变形集中在离散关节上。 这类似于具有无限多个关节和无限小链接的刚性链接机器人。 为了用有限的参数集表示这种平滑形状变化,早期的连续体机器人研究人员建立了一种由多个圆弧段连接而成的运动学表示,如图4(b)所示。 这个想法通常被称为分段常曲率。
在计算位姿中,正运动学可以使用常曲率变换的递归形式来实现。
对于恒曲率框架下的运动规划和控制,必须解决逆运动学问题。也就是说,对于任务空间中的给定姿态,什么执行器值是必要的?通过解决与中间配置空间相关的两个子问题来解决这个问题,如图5所示。
第一个问题被称为任务到配置的逆运动学TCIK,它为一个期望的末端执行器姿态找到一个配置。第二个问题是配置到关节的空间逆运动学CJIK,它为给定的配置找到必要的驱动变量。
对于期望的末端执行器姿态,TCIK问题可以有许多解决方案,因为这些段是串行链接的。相比之下,CJIK通常对大多数连续体机器人都有一个单一的解决方案。一般使用机器人雅可比矩阵对n段连续体机器人的逆运动学进行数值求解,并对配置空间率进行积分,以收敛到所期望的末端执行器姿态。
连续体机器人运动学的一种更一般的建模方法是以微分形式表示运动学变换,允许可变的曲率和形状沿长度变化。如图4(c)所示,可以写一个有限序列的矩阵乘法,而是写一个微分方程来描述变换矩阵。
C. Continuum Mechanics and Equilibrium 连续介质力学和平衡
传统刚性链接机器人的配置仅取决于关节变量,而连续体机器人的建模具有挑战性,因为配置还可能取决于外部负载和材料特性。 为了解决这个挑战,如Cosserat杆理论、Kirchhoff杆理论等经典的细长弹性物体模型已经成为预测机器人在内部驱动和外部负载作用下的变形的强大工具。
D. Control, Sensing, and Planning 传感与规划
传感
1)形状感知:对曲率和连续体段的形状感知主要集中在使用集成光纤布拉格光栅(FBG)传感器的传感束上。当连续体段弯曲时,位于该段内部的FBG传感器会经历线性应变,这被检测为激励信号的相移。这种应变可以被解释为局部曲率的测量。通过将来自机器人上分布的传感器阵列的这些测量值结合起来,可以积分求解出偏转的形状。
2) 接触检测:通过监测关节级力或通过末端执行器运动与理论无约束运动的偏差,可以实现对连续体机器人约束接触的感知。运动运动学可以通过测量关节级信息和配置空间反馈来表征,使用磁性跟踪线圈测量 。虽然关节级力感测方法对于缓慢运动是准确的,但由于传感器噪声,这一方法并不准确。
3) 力传感:可以利用关节级信息来估计导管或连续体机器人的负载。此外,连续体机器人的固有柔顺性也提高了基于观察机器人形状偏转的应用力估计的可能性。最后,基于挠曲的力估计模型已经从学习与数据驱动的角度进行了研究。
4)基于医学图像:如透视、内窥镜和超声等术中成像方式,可以支持最直接的可视化或直接的观察连续体手术机器人的状态和人体解剖结构。各种术中成像方法在估计或重建连续体机器人的形状方面都显示出了巨大的潜力,从而改善临床工作流程。
规划
运动规划通常涉及解决机器人内部自由度的协调问题,以在所需的任务空间中产生有意义的运动。
对于连续体医疗机器人来说,有意义的运动是指执行医疗任务的一部分,同时避免对周围组织的损伤。
对于任何超冗余机器人来说,运动规划的一个挑战是规划发生在配置空间中,该空间的维度随系统的自由度数量增加而增加。 关于连续体机器人的规划研究大部分与降低配置空间的维度有关。
通常通过仅规划机器人的尖端或远端来实现,然后强制机器人的其余部分“跟随领导者”,随着机器人的远端部分在空间中移动。
连续体机器人运动规划的第二个挑战是避免或最小化机器人在移动过程中对周围组织的损伤。 最后,与许多规划器一样,无论是机器人还是其环境,不确定性也是开发连续体机器人规划器时需要考虑的重要因素。
基于样本的规划方法被广泛使用,因为它们能够快速在高维配置空间中找到路径。 两种经典的基于样本的方法是概率路线图(PRMs)和快速探索随机树(RRTs) 。除了基于样本的规划,还开发了其他用于同心管机器人运动规划的方法。 这些方法包括反向传播神经网络与粒子群优化等。
Reference
[1] Dupont, P. E., Simaan, N., Choset, H., & Rucker, C. (2022). Continuum robots for medical interventions. Proceedings of the IEEE, 110(7), 847-870.
[2] Yip, M., Salcudean, S., Goldberg, K., Althoefer, K., Menciassi, A., Opfermann, J. D., … & Lee, I. C. (2023). Artificial intelligence meets medical robotics. Science, 381(6654), 141-146.
[3] Dai, J. S. (2014). Geometrical foundations and screw algebra for mechanisms and robotics. Higher Education Press, also Screw Algebra and Kinematic Approaches for Mechanisms and Robotics.
[4] Burgner-Kahrs, J., Rucker, D. C., & Choset, H. (2015). Continuum robots for medical applications: A survey. IEEE Transactions on Robotics, 31(6), 1261-1280.
[5] Shi, C., Luo, X., Qi, P., Li, T., Song, S., Najdovski, Z., … & Ren, H. (2016). Shape sensing techniques for continuum robots in minimally invasive surgery: A survey. IEEE Transactions on Biomedical Engineering, 64(8), 1665-1678.

