
- 1YOLO 3/4/5/6/7/x、Efficient、MaskRcnn、FasterRcnn、FCOS、SSD、M2Det、Retina、CenterNet、PicoDet等系列数据模型汇总持续更新中_fasterrcnn cascadercnn yolov3 picodet
- 2Vue3+element-plus+vite 组件的二次封装-- 新建npm打包项目,生成二次封装npm组件库,本地测试_vue3 vite 二次封装element plus成一个npm包
- 3Java 异常Exception e中e的getMessage()和toString()方法的区别_exception.getmessage
- 4文心一言4.0相当于GPT几?揭秘AI巨头的实力对比
- 5【 数据可视化——词云图绘制 】四步搞定从图片提取颜色的词云图绘制 基于Python_词云图图形
- 6推荐系统[四]:精排-详解排序算法LTR (Learning to Rank): poitwise, pairwise, listwise相关评价指标,超详细知识指南。_ltr listwise
- 7QT 界面设计篇(水波纹进度条QProgressBarWater)_qt qprogressbar美化,水波纹进度条
- 8ubuntu22.04配置静态ip问题_permissions for /etc/netplan/01-network-manager-al
- 9Bert论文翻译
- 10Python淘宝书籍图书销售数据爬虫可视化分析大屏全屏系统
【数据集】waymo motion dataset介绍与数据解析可视化_waymo motion数据集
赞
踩
前言
- waymo open dataset数据集由两个数据集组成: Perception数据集 + Motion数据集
- Perception数据集主要用于2D和3D目标检测和追踪任务,是自车第一视角数据
- Motion数据集主要用于自动驾驶行为预测,是鸟瞰图数据
- 我们重点学习Motion数据集
1. 数据下载
- Waymo完整数据集下载: https://waymo.com/open/download/
- Waymo Motion数据集官方主页: https://waymo.com/open/data/motion/
- Waymo数据格式/读取/评估工具安装和环境配置: https://github.com/waymo-research/waymo-open-dataset
- Waymo Perception数据集论文: https://arxiv.org/abs/1912.04838v7
2. Motion数据集
-
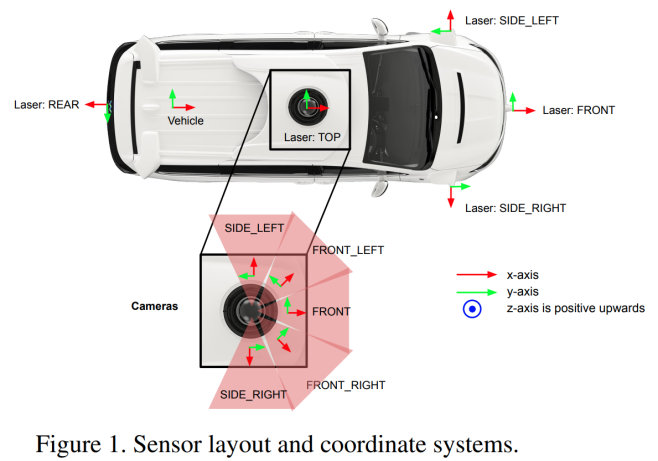
传感器方案: 5 Lidar(64线束)和5高分辨率针孔相机。限制了LiDAR数据范围,并且每个激光脉冲有两个回波(双回波)。相机图像是通过卷帘快门扫描捕获的,其中确切的扫描模式可能因场景而异, 所有相机图像都将进行降采样并从原始图像中裁剪出来
-
数据量和场景: Motion数据集有100000段总计超过200000000帧的数据,但是好像只有激光雷达采集的数据和对应的地图还原结果, 标签为Vehicles, Pedestrians, Cyclists三类(使用VPN)
3. 数据描述
-
(1) 数据集文件格式为tfrecord, 是tensorflow的一种格式
-
(2) 一个trrecord包含199帧数据, 是连续时间段的数据帧, 采样频率10Hz, 近似有20s数据
-
(3) 一帧中包含了车上所有传感器的数据以及相应的label
-
(4) 一个tfrecord包含多条scenario, scenario是一条数据的最小单元,
-
(5) 数据格式包含在scenario中, 使用scenario.proto进行描述
-
(6) scenario代表一个场景, 也就是一段时间内的交通信息,包括自车和其它的交通参与者,以及交通灯在20s内的轨迹和状态,同时还包括了道路信息
-
(7) scenario每个场景包含9秒91帧数据, 其中历史10帧, 当前1帧, 未来80帧, 在轨迹预测或其他任务中一般使用1s历史数据预测8s未来数据; 也可以根据实验用途从20s数据中自己切分数据
waymo motion数据的结构如图:
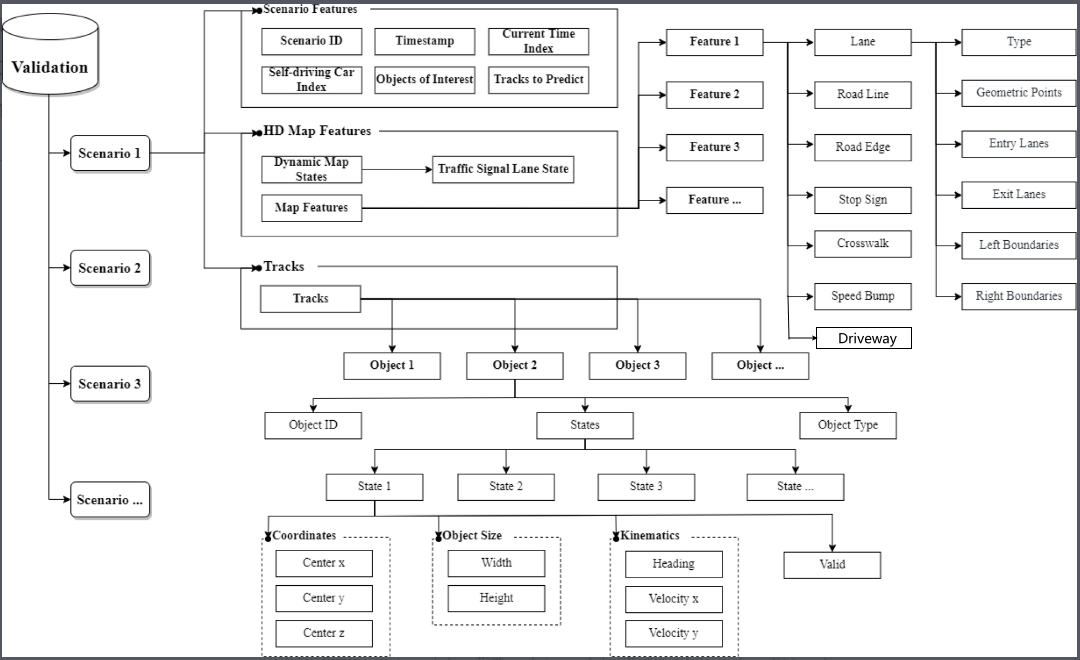
接下来我们详细介绍scenario.proto和map.proto地图格式
4. 数据特征scenario.proto
-
一个场景中的特征主要分为三个部分
- (1) 场景Features:该类别包括当前场景的基本信息,如场景ID、自动驾驶汽车的索引等
- (2) HdMap Features:静态和动态地图功能都属于这一类别。动态地图特征包括交通信号状态,静态地图特征包括道路几何形状和连接的综合信息。Waymo提供车道、边界、人行横道、豁口等的明确坐标。对于每个路段,上游/下游车道和相邻车道的索引都记录在相应的属性中
- (3) 轨迹Tracks:此属性存储场景中所有观察到的对象的运动。共有四种类型的对象:车辆、行人、骑自行车的人和其他。物体的状态以10 Hz的频率记录,每个状态包括物体的坐标(x、y、z)、尺寸(宽度和高度)、运动(航向、纵向和横向速度)和有效标志等
-
Scenario结构
message Scenario { reserved 9; // 场景ID optional string scenario_id = 5; // 时间戳数组.与追踪目标tracks和红绿灯状态数组大小相等 repeated double timestamps_seconds = 1; // 当前时间在时间戳数组中的index, 在此之前的为历史数据,在此之后的为预测数据 optional int32 current_time_index = 10; // scenario内所有追踪目标; tracks[i].states[j]表示第i个目标在j时刻的状态 repeated Track tracks = 2; // scenario的动态地图状态, 这里主要指交通灯信息; 和时间戳数组大小相等, dynamic_map_states[i]表示i时刻的交通灯信息 repeated DynamicMapState dynamic_map_states = 7; // scenario的静态地图特征, 如lane/road/crosswalk/driveway等静态地图 repeated MapFeature map_features = 8; // 自车在目标tracks里的索引 optional int32 sdc_track_index = 6; // 与自车有交互行为的目标ID列表; 这些ID对应tracks里的id repeated int32 objects_of_interest = 4; // 需要预测的目标列表,这只是建议train的目标,不是包含所有目标 repeated RequiredPrediction tracks_to_predict = 11; // 每个时间步的lidar数据列表; 包含当前时间步之前的lidar数据, 即timestamps_seconds[i] where i <= current_time_index; 不是所有版本中均有此字段 repeated CompressedFrameLaserData compressed_frame_laser_data = 12; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
-
数据结构:Track
message Track { enum ObjectType { TYPE_UNSET = 0; // This is an invalid state that indicates an error. TYPE_VEHICLE = 1; TYPE_PEDESTRIAN = 2; TYPE_CYCLIST = 3; TYPE_OTHER = 4; } // 被追踪的目标ID, 非负 optional int32 id = 1; // 目标类型 optional ObjectType object_type = 2; // 目标states,包括位置速度信息等 repeated ObjectState states = 3; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
-
数据结构:ObjectState
message ObjectState { // Coordinates of the center of the object bounding box. optional double center_x = 2; optional double center_y = 3; optional double center_z = 4; // The dimensions of the bounding box in meters. optional float length = 5; optional float width = 6; optional float height = 7; // 目标朝向, 取值[-pi, pi] optional float heading = 8; // 速度m/s,和目标朝向heading可能有差异 optional float velocity_x = 9; optional float velocity_y = 10; // state状态数据是否有效, False表示数据无效或丢失 optional bool valid = 11; }- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
-
数据结构:DynamicMapState
message DynamicMapState { // 在该时间步能观察到的所有红绿灯列表 repeated TrafficSignalLaneState lane_states = 1; }- 1
- 2
- 3
- 4
- 5
-
数据结构:TrafficSignalLaneState
message TrafficSignalLaneState { // 被该交通灯控制的lane id optional int64 lane = 1; enum State { LANE_STATE_UNKNOWN = 0; // 箭头交通灯信号 LANE_STATE_ARROW_STOP = 1- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10

