
热门标签
热门文章
- 1C++:函数调用的压栈过程_c++函数调用的压栈过程
- 2pytorch报错RuntimeError: DataLoader worker (pid(s) xxx) exited unexpectedly_runtimeerror: dataloader worker (pid(s) 3820) exit
- 3蚁剑有时候连不上webshell_蚁剑无法连接webshell
- 4快速了解:数据库的分类,OLTP、OLAP与HTAP_olta、olat、htap都有哪些数据库
- 5【深度学习-seq2seq模型-附实现机器翻译的核心代码】_机器翻译代码实现
- 6z=xy为什么是马鞍面?
- 7123-基于stm32单片机PWM输出蜂鸣器频率变声器Proteus仿真+源码_仿真stm32蜂鸣器发声
- 8【PMP】通用流程_pmp问题解决流程
- 9stm32比较输出模式配置以及用于步进电机控制(采用步进电机驱动器)_stm32 tim8 比较输出控制步进电机
- 10Angular 版本演进史概述_angular历史
当前位置: article > 正文
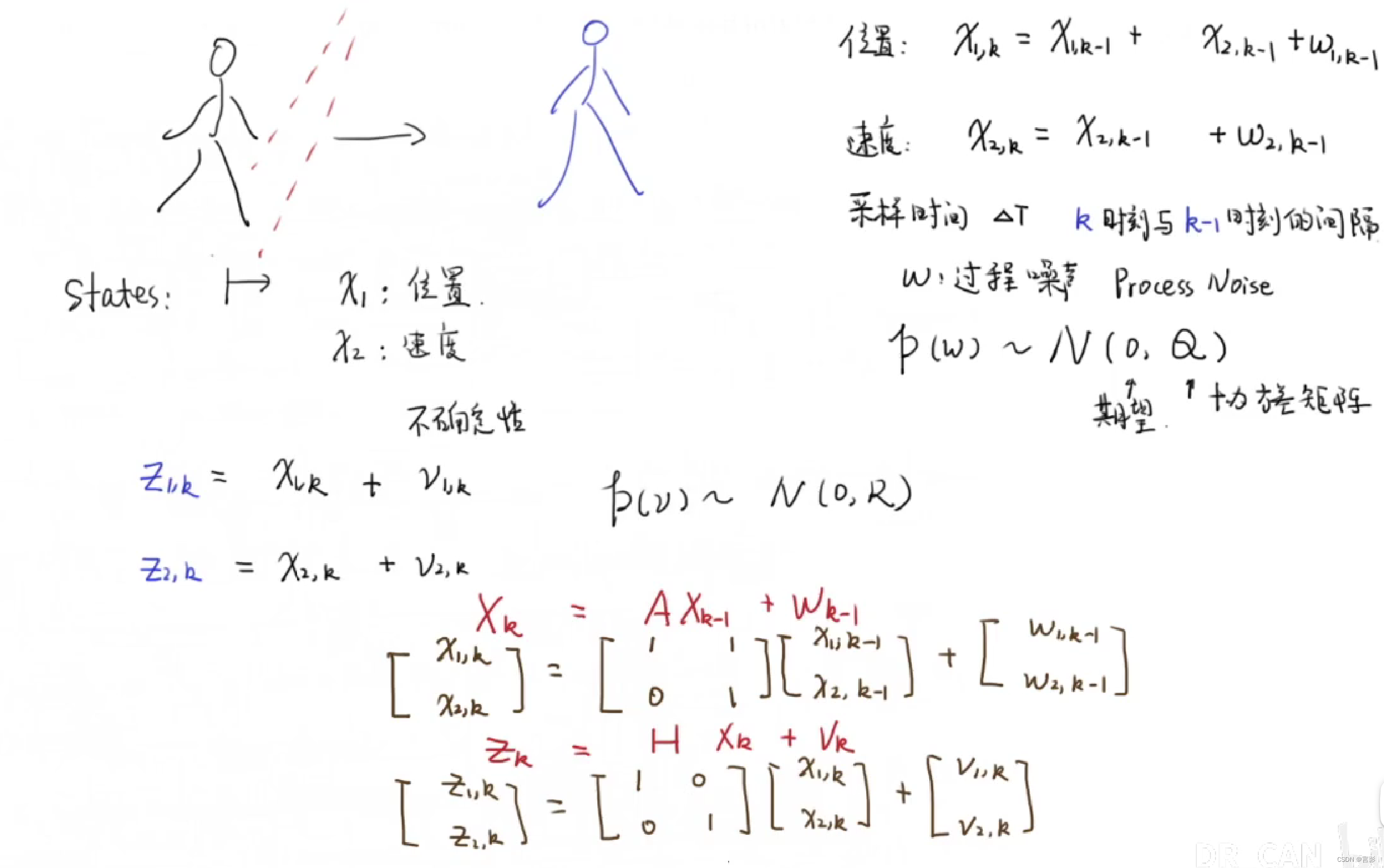
mpu6050之卡尔曼滤波_卡尔曼滤波mpu6050
作者:繁依Fanyi0 | 2024-05-14 10:12:36
赞
踩
卡尔曼滤波mpu6050



声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/繁依Fanyi0/article/detail/568333
推荐阅读
相关标签

