
- 1【聚类】DBSCAN聚类(含代码实战)_dbscan案例加代码
- 2pnpm : 无法加载文件 D:\NodeJS\node_global\pnpm.ps1。_无法加载pnpm.ps1
- 3在阿里云上用LLaMA-Factory微调大模型_llama factory
- 4ZYNQ7000-MIO与EMIO详解_mio和emio
- 5JVM监控工具介绍
- 6python redis mysql缓存_基于python+mysql+redis缓存设计与数据库关联数据处理
- 7考生必看!PMP考试答题技巧有哪些?
- 8Python高效操作Word:实用技巧与进阶方法_python word库
- 92024年Linux最新云计算 (持续更新中)
- 10ElasticSearch入门之索引映射mapping管理, es如何查看索引字段类型, es复制索引库 09_es查看索引字段类型
【Matlab】建立最优控制LQR控制器模型_lqr控制算法matlab
赞
踩
前言
之前做了有关于系统辨识以及配置极点来控制系统响应的相关内容,那些相当于是打开了一个新世界的大门,在此基础上,一直想学习一下最优控制的相关内容,并应用在项目上,因此,学习了相当长的时间,然后搭建模型,不过越来越感到,我学习到的也只是控制世界的冰山一角,话不多说,开始记录搭建模型的步骤。
传递函数转化到状态空间
首先,我可以辨识出系统的传递函数,需要转化成状态方程,这里我稍微记录了一下由传递函数转换到状态空间的步骤:


以上是随便举了一组数据手算的,之后使用Matlab验证,Matlab是有这种转换函数可以直接调用的:
- %*************************************************************************%
- %传递函数转化为状态方程
- %**********************************************************************%
-
- num = [4,9,14,23];
- den = [2,4,6,10];
- sys = tf(num,den); %转化为传递函数G
-
- [A,B,C,D]=tf2ss(num,den); %传递函数转化为状态空间
可以看到,与我实际计算出来的是吻合的。当然,如果能够直接建立微分方程的模型,就不需要此步骤了。
建立观测器
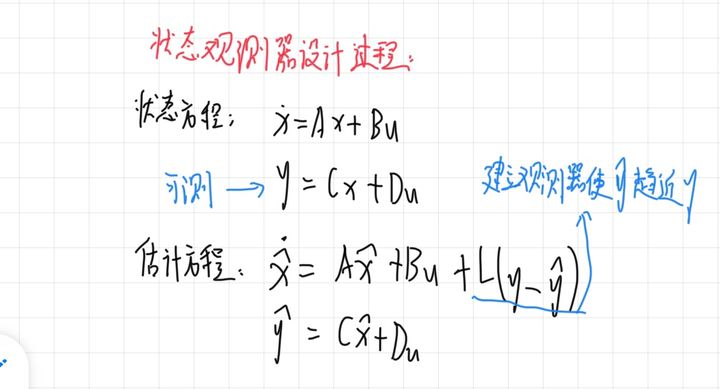
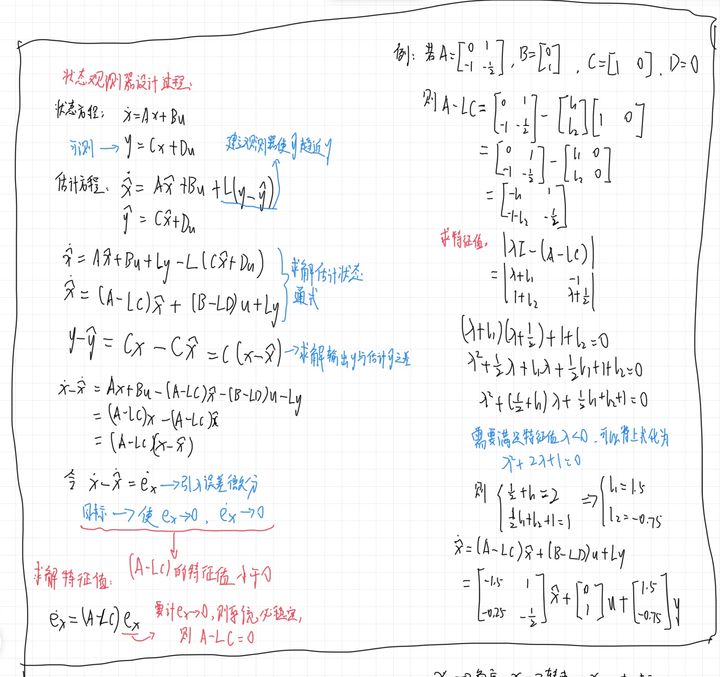
接下来,需要建立状态观测器,因为实际的状态变量x,并不容易被测量,或者说,有时候由传递函数转化到状态空间之后,x代表的状态是对应不到实际的物理意义的,因此观测器的设计还是很有必要,这里我参考学习了一些全阶观测器的设计过程,步骤如下:
1.建立状态方程与估计方程:
2.求出状态与估计状态之差的通式
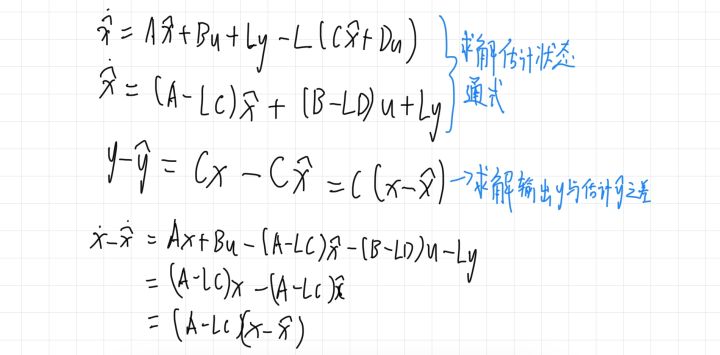
3.引入状态误差变量,求出其特征值,即可得出状态观测器L矩阵的元素值
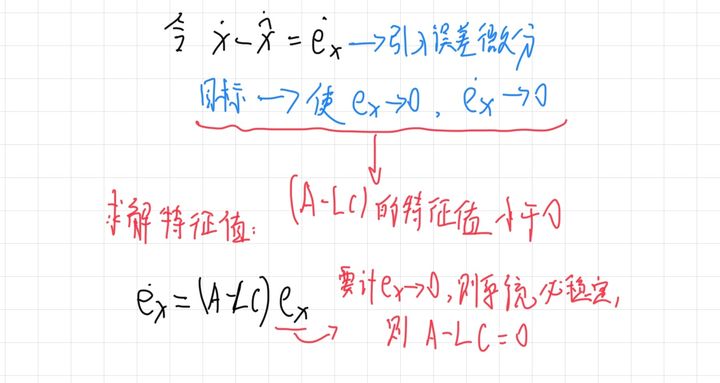
例:

总体步骤:
求解全阶观测器L矩阵在Matlab也是直接有函数可以计算的,上述的手算过程只是为了来练习一下,了解观测器的原理与步骤。程序如下:
- %*************************************************************************%
- %计算全阶观测器矩阵L的参数
- %**********************************************************************%
-
- %输入状态方程矩阵
- A = [0 1;-1 -0.5];
- B = [0;1];
- C = [1 0];
- D = 0;
-
- %输入观测器期望极点 即特征值
- V = [-1 -1];
-
- L = (acker(A',C',V))';
- L =
- 1.5000
- -0.7500
建立simulink仿真:


我在积分环节那里设置了初始值,就是为了让实际状态与估计状态初始不一样,这样可以看到收敛效果,从上图中可以看出估计值最终收敛,与实际状态x重合。
求解控制律U
这里设控制律U = -K * X + e ,K即为空置率矩阵,X为状态矩阵,e为目标值与实际值的误差(为了加入跟随性能)
具体求解最优控制率U的问题,设计泛函分析与极小值原理等等,这个我只是看了一部分书上的东西,在没有自己琢磨好之前,还是先留着,以后自己验算完成再发。
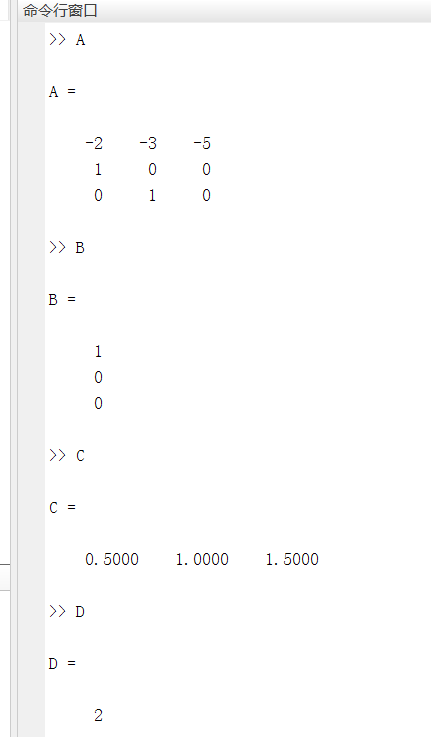
因此我就省事了一下,直接用Matlab求解K矩阵。上面那个系统的参数有些简单,为了验证效果,我把传递函数取了一些奇怪的数字:
- %*************************************************************************%
- %传递函数转化为状态方程
- %**********************************************************************%
-
- num = [0 333.1 279.9 358.1];
- den = [1 0.5404 0.05445 0];
- sys = tf(num,den); %转化为传递函数G
-
- [A,B,C,D]=tf2ss(num,den); %传递函数转化为状态空间
-
- A =
-
- -0.5404 -0.0544 0
- 1.0000 0 0
- 0 1.0000 0
-
- B =
-
- 1
- 0
- 0
-
- C =
-
- 333.1000 279.9000 358.1000
-
- D =
-
- 0
可以看到这个系统的矩阵略微复杂了一些,真实的系统参数应该就是这样比较难算的,这里还是得感谢Matlab这个工具,帮我省略了一大波计算过程,我可以直接得到观测器矩阵L的值:
- %根据观测器的期望极点计算观测器L矩阵
- L = (acker(A',C',V))';
-
-
- L =
-
- 0.9697
- 0.1769
- -0.9733
以及得到控制律矩阵K的值:
- %指定QR矩阵,计算控制率
- Q = [100,0,0;0,1,0;0,0,1];
- R = 0.2;
-
- K = lqr(A,B,Q,R); %输出LQR控制器的K矩阵
-
-
- >> K
- K =
-
- 22.2824 10.2930 2.2361
画出Simulink模型:



这里的控制器U的状态输入是使用估计状态 xhat,实际项目中也会是使用估计值。
在simulink设置中设置计算步长:



可以看到观测器的收敛效果以及输出量的跟随效果。点个赞喽!

