
热门标签
热门文章
- 1基于Springboot+VUE前后端分离的学生管理系统_基于spring boot+vue的学生管理系统
- 2python如何提取word文档某个段落所有内容(包括段落、表格、图片一并提取)_用python把word某段文字
- 3一文搞懂JVM架构:一线互联网架构师设计思想解读开源框架_jvm中优秀的设计思想
- 4(14)点云数据处理学习——RGBD 里程计_rgbd视觉里程计
- 5分位数回归、GAM样条曲线、指数平滑和SARIMA对电力负荷时间序列预测
- 6Ubuntu 安装openstack (stein),超详细_cloud-archive:stein
- 7NAPI机制分析_napi_struct
- 8TCN-Attention时间卷积融合注意力机制 超前24步回归预测 Matlab程序
- 9android 简介_android智能操作系统最震撼人心之处在于它的服务和什么免费
- 10MAC OS使用docker部署RocketMQ,解决宿主机无法访问broker_docker-connector
当前位置: article > 正文
超维空间M1无人机使用说明书——52、ROS无人机二维码识别与降落
作者:羊村懒王 | 2024-03-11 19:13:53
赞
踩
超维空间M1无人机使用说明书——52、ROS无人机二维码识别与降落
引言:使用二维码引导无人机实现精准降落,首先需要实现对二维码的识别和定位,可以参考博客的二维码识别和定位内容。本小节主要是通过获取拿到的二维码位置,控制无人机全向的移动和降落,分为两种,一种是无人机移动到二维码上方直接进行降落,另一种是在降落的过程中继续调整无人机的位置,本小节主要是第一种方式,第二种方式会在后续文档中给出
源码链接
一、启动二维码识别与降落程序
roslaunch ar_track_landing ar_track_landing.launch
- 1
未出现红色报错,表明程序运行正常
launch文件详解
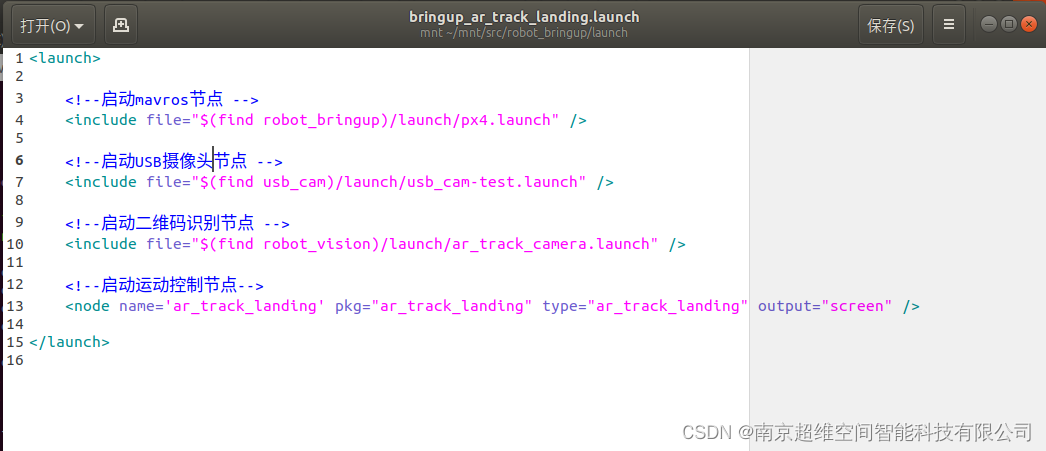
launch文件启动了四个节点,节点作用如下
1、mavros通信节点,实现底层PX4和ROS通信
2、启动USB摄像头节点,提供图像数据
3、启动二维码识别节点,以话题方式发布识别到的二维码位置信息
4、启动运动控制节点,该节点定位实时的二维码位置信息,进行运动控制
- 1
- 2
- 3
- 4
二、视频演示
注:此处视频是采用边降落边调整的方式,是本小节的升级版程序
视频演示: 二维码降落
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/羊村懒王/article/detail/220373
推荐阅读
相关标签

