
- 1Android开发6年,面试腾讯我才发现这些知识点竟然没掌握全?(Android面试题大全篇)
- 2windows系统下重启springboot项目时,提示端口被占用,却找不到占用端口的程序_springboot启动端口被占用,确定没有被占用
- 3NLP-BERT 谷歌自然语言处理模型:BERT-基于pytorch_bert github
- 4距离度量常见四种距离方式的及KNN算法对鸢尾花分类_knn距离度量方式
- 5基于spring boot+maven+opencv 实现的图像深度学习java人脸识别jsp源代码Mysql_基于spring boot + maven + opencv 实现的图像深度学习
- 6人工智能算法原理与代码实战:自然语言处理的基本原理与实现_中文自然语言处理基础与实战的算法的思想
- 7windows安装mongodb6.x并设置用户名密码_windows设置mongo密码
- 8USACO Section 4.3 Letter Game_信游戏在家里和电视上都很流行。在游戏的一个版本中,每个字母都有一个值,你收
- 9热门不再!科技大厂放缓招聘,美国计算机专业学生求职四处碰壁
- 10基于FPGA的交通灯_基于fpga使用verilog的交通信号灯论文结论
《3D Diffusion Policy》论文阅读
赞
踩
本文仅是个人对该文章的阅读总结,并不能全篇概括作者的精华,还需大家详细阅读原文
---------------------------------------------------------------------------------------------------------------------------------
摘要
问题:模仿学习为教授机器人灵巧技能提供了一种高效途径,但是学习复杂的、具有普适性的技能通常需要大量的人类示范
解决:3D扩散策略(DP3)将3D视觉表示的强大之处融入到扩散策略中,这是一类有条件的动作生成模型。
核心:利用高效的点编码器从稀疏点云中提取紧凑的3D视觉表示。
取得成果:
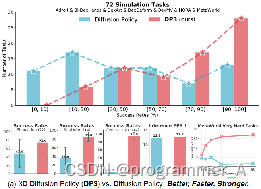
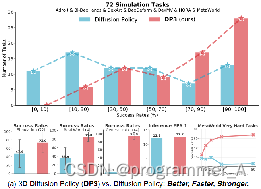
(1)在涉及 72 个模拟任务的实验中,DP3仅使用 10 个示范就成功处理了大多数任务,并且相对于基线方法取得了 55.3% 的相对改进。
(2)在 4 个真实机器人任务中,DP3仅使用每个任务 40 个示范就展示了精确控制,成功率高达 85%,并且在空间、视点、外观和实例等多个方面展现了出色的泛化能力。
(3)DP3很少违反安全要求。
方法
问题定义:
视觉运动策略 π : O → A
视觉观察 o ∈ O
动作 a ∈ A
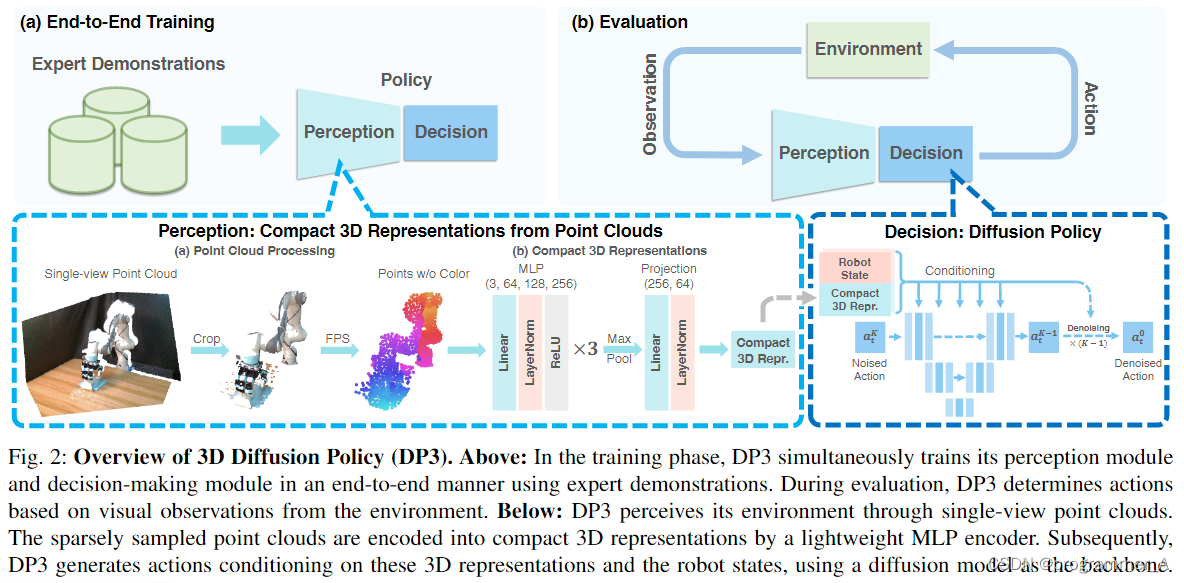
DP3组成:
(1)Perception:DP3利用点云数据感知环境,并利用高效的点编码器将这些视觉观测结果处理成视觉特征;
(2)Decision:DP3利用了expressive Diffusion Policy 作为动作生成的支干,该策略根据我们的3D视觉特征生成动作序列。
A Motivating Example
证明DP3的泛化能力:
目标:让手持器准确的到达指定目标点
为了评估模仿学习算法不仅适应训练数据的有效性,还要泛化到新场景的能力,在3D空间中可视化了•训练点和•成功评估点
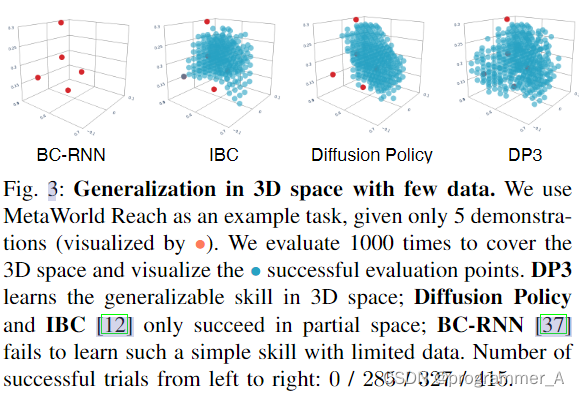
仅用五个训练点,DP3就能到达分布在3D空间中的点,展示了DP3在数据有限的情况下的优越泛化能力和效率。
Perception

DP3侧重于仅使用单视图摄像机对所有任务进行策略学习。
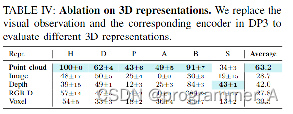
Representing 3D scenes with point clouds(点云表示)
- DP3采用稀疏点云作为三维表示,因为与(RGB-D、深度和体素)相比,点云更有效。
- 对于模拟和现实世界,从单个相机获得大小为84 × 84的深度图像。然后,使用相机外参和内参将深度转换为点云。为了获得更好的外观泛化效果,不使用彩色通道。
Point cloud processing(点云处理)
- 由于从深度转换而来的点云可能包含冗余点,因此需要裁剪掉这些点,仅保留在一个边界框内的点
- 通过最远点采样(FPS)对点进行降采样,这有助于充分覆盖 3D 空间,并减少了点云采样的随机性
- 将点云降采样至 512 或 1024 个点
Encoding point clouds into compact representations(将点云编码为紧凑的表示)
使用轻量级MLP网络将点云编码为紧凑的3D表示
Decision
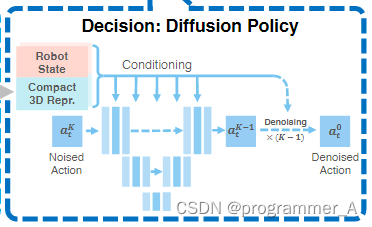
Conditional action generation(条件动作生成)
- 该模型在三维视觉特征和机器人姿态 q 的条件下,将随机高斯噪声降噪为动作 a 。

Training objective(loss损失):
- 训练目标是预测添加到原始数据中的噪声
![]()
Implementation details(实现细节)
- 使用基于卷积网络的扩散策略
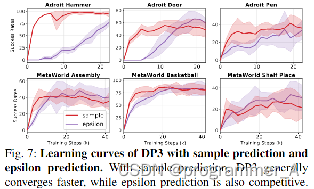
- 使用 DDIM 作为噪声调度器,并使用样本预测代替epsilon预测来更好地生成高维动作,训练时使用100个时间步,推理时使用10个时间步
- DP3和所有基线训练了3000个epoch,批大小为128,以确保所有任务的收敛性。
实验
Simulation benchmark
仿真与现实场景之间仍然存在显著差距
(1)真实机器人实验的重要性
(2)大规模多样化模拟任务的必要性 收集了7个领域的72个任务,涵盖了不同的机器人技能,(双手动操作、可变形对象操作、铰接对象操作、平行抓手操作)
Expert demonstrations:(这个地方没看懂,就直接全翻译过来,大家自己看吧....)
专家演示是由强化学习(RL)
- 算法训练的代理收集的,适用于除了 DexDeform 外的所有领域,其中我们使用人类远程操作的数据。
- 对于 Adroit,我们使用 VRL3 [67];
- 对于 MetaWorld,我们使用 BAC [29];
- 对于所有其他领域,我们使用 PPO [54]。
- 我们使用 RL 代理生成成功轨迹,并确保所有模仿学习算法使用相同的演示。
Baselines
- 这项工作的主要重点是强调3D模式在扩散政策中的重要性。
- baseline是于图像的扩散策略,简称为扩散策略
Evaluation metric:
对每个实验使用seeds号为 0、1、2 运行 3 个seeds。对于每个seeds,我们在每 200 个训练epochs次评估 20 个 episode,然后计算最高的 5 个成功率的平均值。我们报告了在 3 个seeds上成功率的平均值和标准差。
Efficiency and Effectiveness
在以下三个方面DP3表现出惊人的效率:
(1) High accuracy
- DP3在近30个任务中实现了超过90%的成功率
- 扩散策略在不到15个任务中实现了超过90%的成功率
- DP3没有记录任何成功率低于10%的任务
- 扩散策略有超过10个成功率低于10%的任务
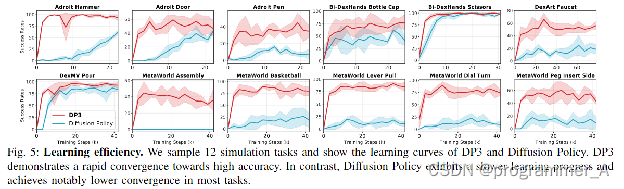
(2) Learning efficiency
虽然每个任务都训练了3000个epoch,但是观察发现DP3在所有任务大概300 epoch已经达到收敛 相反,扩散策略倾向于以慢得多的速度收敛或收敛到次优结果。
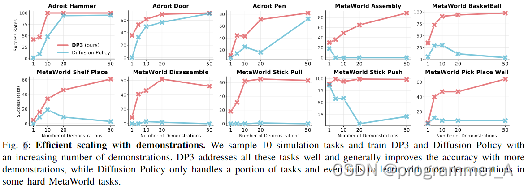
(3) Efficient scaling with demonstrations
- 在Adroit任务中,DP3和扩散策略都执行合理,而DP3在较少的演示中达到了相当的精度。
- 在简单的MetaWorld任务中,即使演示次数增加,扩散策略也无法学习,明显落后于DP3
(4) Competitive inference speed
DP3实现的推理速度略微超过扩散策略,这主要归功于使用稀疏点云和紧凑的3D表示。
消融实验
选择了6个任务进行消融实验:
Adroit [ Hammer (H), Door (D), Pen (P) ];
MetaWorld [ Assembly (A), Basketball (B), Shelf Place (S) ]
这些任务包括高维和低维控制任务,每个任务只使用10个演示
实验1:不同表示之间的对DP3的影响
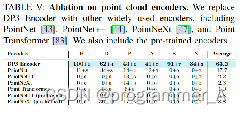
实验2:point cloud 编码器选择
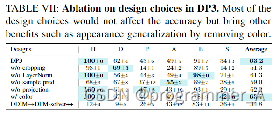
实验3:DP3设计
(a) 对点云进行裁剪在很大程度上提高了准确性;
(b) 整合 LayerNorm 层可以帮助稳定不同任务之间的训练;
(c) 在噪声采样器中进行样本预测可以加快收敛速度;
(d) DP3 编码器中的投影头通过将特征投影到较低维度加速了推断,而不会影响准确性;
(e) 移除颜色通道确保了鲁棒的外观泛化;
(f) 在低维控制任务中,作为噪声采样器的 DPM-solver++ 与 DDIM 竞争力相当,而 DPMsolver++ 不能很好地处理高维控制任务。
实验4:Training policies on demonstrations from different experts.
我们希望研究专家的行为方式是否会影响模仿学习方法的性能。为此,我们分别在 MetaWorld 任务中使用 RL 训练的代理和脚本策略生成演示,并在这些演示上进行训练。我们可以观察到,一个更好的专家通常能够帮助使用模仿学习算法训练出更好的策略,但 DP3 与地面真值专家之间仍然存在差距。

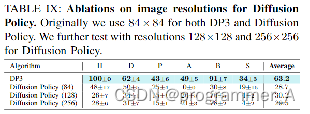
实验5:不同的图片分辨率对扩散策略的影响
真实场景实验可以之间看论文,这里就不针对该章节,进行详细描述了
结论
- 介绍了 3D Diffusion Policy(DP3),这是一种高效的视觉模仿学习算法,使用少量示范就能够在模拟和真实环境中管理各种机器人任务。
- DP3 的核心在于将精心设计的 3D 表示与扩散策略的表现力相结合。
- 在 72 个模拟任务中,DP3 的表现优于其 2D 对应物,相对边际提高了 55.3%。
- 在真实环境中,DP3 在使用 Allegro 手执行可变形物体的复杂操作时表现出高准确性。
- 证明了 DP3 具有对各个方面的强大泛化能力,并在真实环境中造成的安全违规较少。
局限
尽管已经开发了一种高效的架构,但控制的最佳 3D 表示仍然有待发现。此外,本文未深入探讨具有极长视角的任务,这留给未来的探索。(未来继续加油)
---------------------------------------------------------------------------------------------------------------------------------
论文地址:
https://arxiv.org/abs/2403.03954
Github:(作者的github写的非常详细,常见错误的解决方法都写出来了)
GitHub - YanjieZe/3D-Diffusion-Policy: [arXiv 2024] 3D Diffusion Policy
项目地址:

