
- 1【整理】树莓派初识_rasphmi
- 28.2 OpenCV简介_openmv是基于opencv算法研发的吗
- 3java扩展jmeter依赖
- 4Unknown CMake command
- 5Python Selenium 常用方法_python selenium输入框填值
- 6微软如何打造数字零售力航母系列科普01 --- Azure顾问(AZURE Advisor)简介
- 7AI程序员时代的到来:探索其对程序员行业的深远影响_ai程序员的出现将给整个行业带来以下新变化
- 8关于下载homebrew的一波三折_to retry an incomplete download, remove the file a
- 92022-2024年最全的计算机软件毕业设计选题大全:1000个热门选题推荐✅_毕业设计常用题
- 10python3.9安装sklearn
FANUC机器人:参考位置功能介绍与设定方法_fanuc机器人寻位实例
赞
踩
本文已经首发在个人微信公众号:工业机器人仿真与编程(微信号:IndRobSim),欢迎关注!
机器人参考位置概述
机器人参考位置是在运行程序中或手动运行过程中频繁使用的固定位置(预先设定的位置)。参考位置通常是离开工装夹具等外围设备的可动区域范围内的安全位置。
机器人位于参考位置时,会立即输出预先设定的数字信号,实现与总控系统或其他设备的信号交互。FANUC机器人根据这种工况,在机器人系统中内置了参考位置设定功能,以方便用户快速有效地实现机器人的运行控制需求。该功能可以通过将参考位置设定置于启用/禁用,来实现约定信号的输出有效或无效。机器人最多支持设定10个参考位置。
参考位置设定方法
1.机器人示教器上按“MENU (菜单)”键,在弹出的“MENU 1” 菜单画面中,依次选择“6 设置”→“设置 2”→“4 参考位置”。

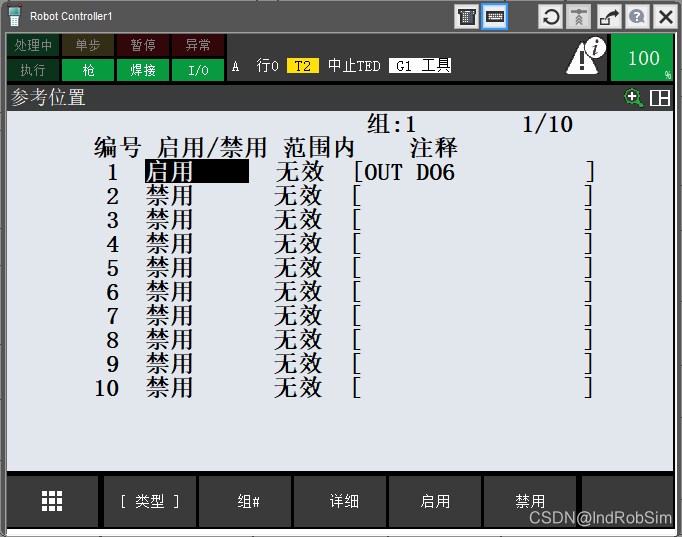
2.在弹出的参考位置一览画面中,选择要设定的参考位置编号,本例中选择编号1。

3.点击下方的“详细”,在弹出的设定参考位置详细画面中,可以设定参考位置相关参数,主要需要设定的有注释、信号定义、机器人各个轴的旋转角度以及各个轴的允许误差范围。

注释设置:参考位置注释设置与其他注释设置方法一样,直接输入需要设置的注释信息就可以了,如本例中设置的OUT DO6。
信号定义:在“信号定义”参数栏中可以设定机器人位于参考位置时的数字输出信号,FANUC机器人支持设定两种信号类型,分别是数字量输出类型(DO[])与机器人输出类型(RO[]),本例定义的输出信号为DO[6]。定义输出信号时,要避免与其它参考位置发生重复。如果在两个以上参考位置中定义了同一信号,则有可能会发生机器人处在参考位置时,但输出信号状态无变化等不可预料的错误。
机器人参考位置:机器人参考位置有两种设定方法:一、位置示教,首先将机器人手动运行到参考位置处,然后将光标移动到J1~J6的设定栏,最后在示教器的操作面板中按住SHIFT键,同时再点击“记录”依次对当前参考位置进行示教;二、直接输入参考位置数值,这种情况下,可以将光标移动到J1~J6的设定栏,然后按“ENTER”键,输入机器人轴的旋转角度值之后,再次按下“ENTER”键对输入的角度值进行确认。本例中采用第二种参考位置设定方法,将程序A中的P[2]示教点位置作为机器人参考位置,直接输入机器人在参考位置各个轴的旋转角度值。当然,如果工作站中有外部轴,还可以在J7~J9栏中分别输入对应的外部轴参考位置,此处要注意伺服电机旋转角度与外部设备运动量之间的减速比。
允许误差范围:允许误差范围栏中可以设置机器人在参考位置各个轴的旋转误差,设定值要大于等于0.1。
4.完成设定后按下“PREV(返回)”键,返回参考位置一览画面。然后,选择编号为1的参考位置,点击“启用”。此时,设定的机器人参考位置功能已经生效。
运行测试
分别打开机器人程序A与I/O数字输出界面。运行机器人程序A,当机器人运行到P[2]示教点位置处时,可以看到数字量输出信号DO[6]变为ON;当机器人移开示教点位置P[2]时,DO[6]立即变为OFF。
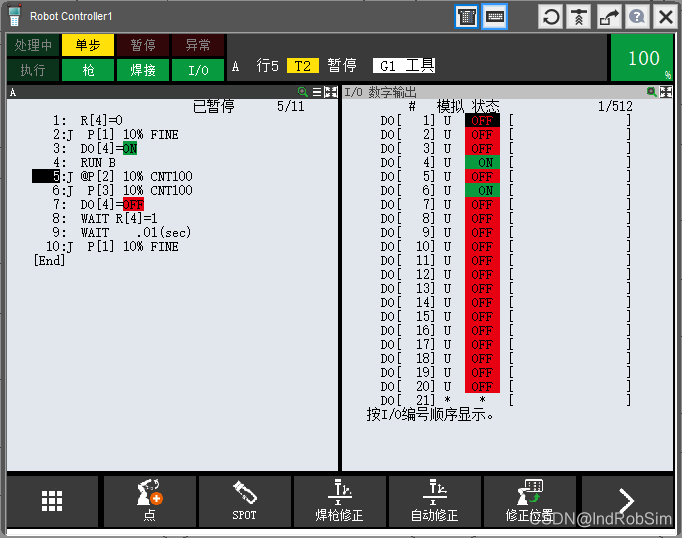
这里也可以手动运行机器人到参考位置处,同样可以监视到数字量输出信号DO[6]的状态变化。
综合对比
对于本例中设置的参考位置,我们完全可以直接在机器人程序A的第5条程序后加1条数字量信号DO[6]置位的程序或在第5条程序后加上数字量信号输出功能,那么当程序运行时也会产生同样的效果。但是,这种方法只能在程序运行时才能监视到参考位置信号状态的变化,若是不运行程序而是纯手动运行机器人,则不能监视到信号变化。当然,我们也可以通过编写后台运行程序来监视机器人位置数据与对应的I/O信号状态的变化,但是这样势必会增加程序编写的复杂度。通过对比之后,可以发现参考位置设定功能的优势也就更加的凸显了。
The End

