
- 1高云1N1开发板高云gowin软件使用教程_高云封装兼容
- 2关于从git上拉下来的代码左下角有一个黄色的闹钟解决办法
- 3C#开源跨平台机器学习框架ML.NET----二元分类情绪分析
- 4技术前沿 |【SIMD并行计算与分布式算法:前沿技术的深度解析】
- 5银河麒麟V10操作系统 创建分区、创建lvm逻辑卷、格式化、挂载_银河麒麟格式化硬盘
- 6浮动时间怎么计算_自由浮动时间 VS 总浮动时间
- 72023北京市人工智能大模型场景融合与产业发展专场活动盛大召开
- 8OpenGL Shading Language_the opengl庐 shading language
- 9matlab 三维核密度图_python数据分布型图表直方图系列核密度估计图
- 1004.05 Linux系统用户与用户组_linux 床架你账号
遨博协作机器人ROS开发 - 遨博E5 DH参数SolidWorks建模_aubo机械臂dh参数
赞
踩
目录
1.实训目标
2.实训环境
※主机系统版本:Windwos10 64位;
※处理器型号:Intel-i7;
※SolidWorks版本:2018 (用户自行安装);
※机械臂模型:AUBO E5带独立底座;
3.实操展示
微课视频:
遨博E5 DH参数SolidWorks建模
4.知识储备
对于协作机器人的运动学和动力学,常用的运动学描述方法包括DH参数法、改进的DH参数法和指数乘积方程法(POE)。
动力学建模常用的方法包括拉格朗日法、牛顿-欧拉法、凯恩法、自旋-偶数法、虚功原理方法。具体内容本文不做扩展,科研学者可投稿至国际期刊Cobot(全球首个协作机器人技术领域的国际期刊ISSN 2752-5813https://collaborativerobot.org)。
首先了解DH参数概念。

对于本课程内容通过修正DH参数方法,在SolidWorks下进行机械臂建模。要对遨博E5机械臂建立改进DH坐标系,需要先掌握其建立原则,规定如下。

接下来根据改进DH参数,建立遨博E5机械臂的DH参数表。顺序如下。

要进行机械臂SolidWorks建模,需要掌握参考几何体的相关操作。其中包括基准面、基准轴、坐标系和点。具体参考几何体的生成方法可参见官方文档和接下来的实操讲解。
5.任务实施
任务实施包含以下步骤。
接下来进行实操演示与讲解。
1.加载AUBO-E5机械臂SolidWorks模型
用户需自行安装SolidWorks 2018版本软件,之后打开本微课用到的模型文件,等待其正常加载完毕。

2.生成机械臂各关节基准轴

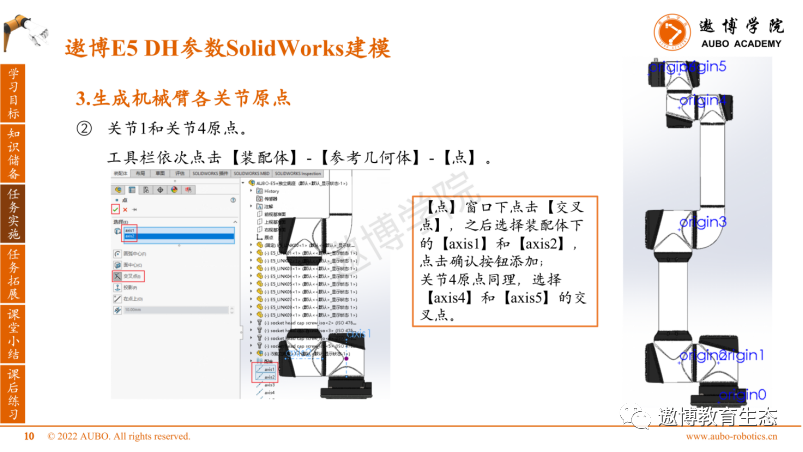
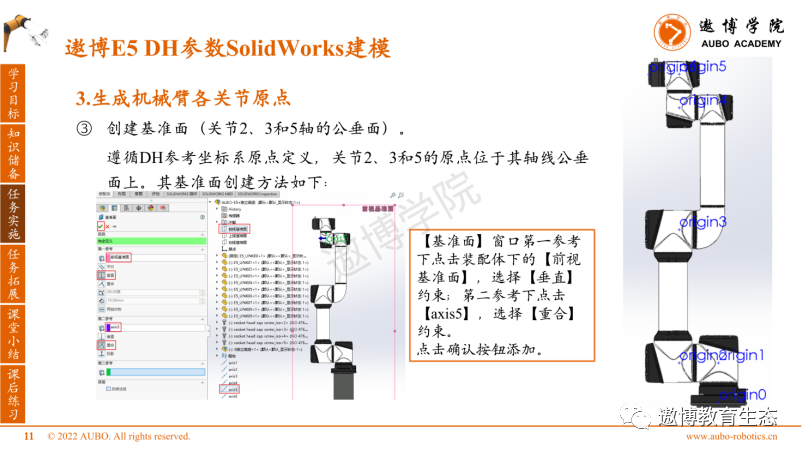
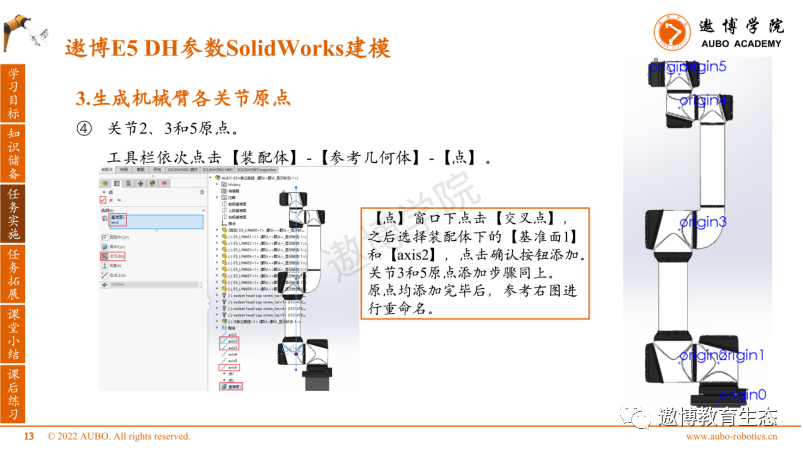
3.生成机械臂各关节原点


4.生成机械臂各关节坐标系


6.任务拓展
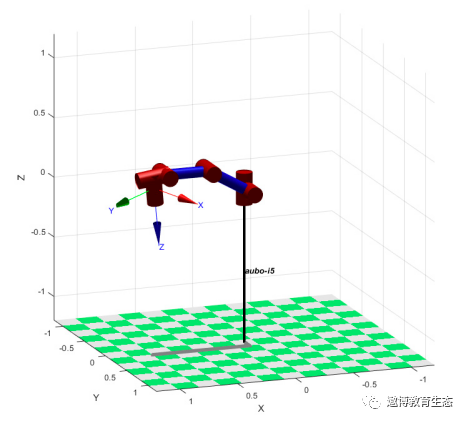
尝试使用MATLAB工具进行遨博E5机械臂DH参数的验证及仿真。
7.课堂小结
通过本篇文章的学习,用户可以基本掌握遨博E5机械臂改进DH参数坐标系在SolidWorks下建模的方法。
在接下来的ROS课程中,我们会讲解《SolidWorks插件生成机械臂URDF功能包》,欢迎持续关注。

8.课后练习


