
- 1printJs 打印HTML 去掉页眉页脚_printjs去掉页头页脚
- 2主成分分析(PCA):代码级实战_pca代码和数据集
- 3山东大学软件学院计算机组成原理2021-2022期末考试回忆版_a800h-afff有多少
- 4按键精灵手机助手计算时间差_按键精灵时间函数
- 5AssetImporter类
- 6JavaWeb笔记(五)后端_web 后端
- 7计算机毕设参考文献、Java参考文献、MySQL参考文献、jsp参考文献、Python参考文献、微信小程序参考文献、外文参考文献_计算机毕设文献
- 8【旧文更新】【优秀毕设】人脸识别打卡/签到/考勤管理系统(OpenCV+最简基本库开发、可移植树莓派 扩展网络图像推流控制 验证码及Excel邮件发送等功能)
- 9水果FL Studio/Cubase/Studio one音乐宿主软件对比_au2024和cubase对比
- 10香港高防服务器和美国高防服务器哪个好?
FOC矢量控制综述_foc算法 iq 与电流关系
赞
踩
想要理解FOC是如何工作的,首先应该在头脑中设想参考坐标变换过程。如果从定子的角度来设想交流电机的运行过程,则会看到在定子上施加了一个正弦输入电流。该时变信号产生了旋转的磁通。转子的速度是旋转磁通矢量的函数。从静止的角度来看,定子电流和旋转磁通矢量看成交流量。
设想在电机内部,转子随着定子电流所产生的选择磁通矢量以相同的速度同步旋转。如果从这个角度观察稳态条件下的电机,那么定义电流看似常量,且磁通矢量是静止的。这样通过参考坐标变换,可使用标准控制环,如同控制直流量一样实现对定子电流的控制。
先看一个矢量控制框图
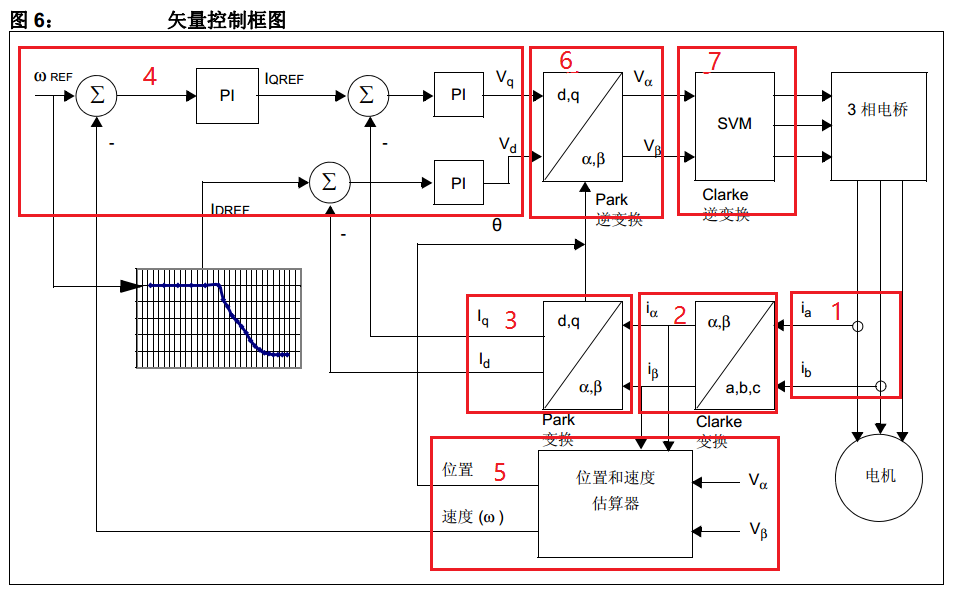
过程如下:
1、测量3相定子电流。这些测量可得到ia和ib的值,可以通过以下公式计算出ic:
ia+ib+ic=0
2、将3相电流变换至2轴系统。该变换将得到变量iα和iβ,它们是由测得的ia和ib以及计算出的ic值变换而来的。从定子角度来看,iα和iβ是相互正交的时变电流值。
3、按照控制环上一次迭代计算出的变换角,来旋转2轴系统使之与转子磁通对齐。iα和iβ变量经过该变换可得到Id和Iq。Id和Iq为变换到旋转坐标系下的正交电流。在稳态条件下,Id和Iq是常量。
4、误差信号由Id、Iq的实际值和各自的参考值进行比较而获得。
· Id的参考值控制转子磁通
· Iq的参考值控制电机的转矩输出
· 误差信号是到PI控制器的输入
· 控制器的输出为Vd和Vq,即要施加到电机上的电压矢量
5、估算出新的变换角,其中Vα、Vβ、iα和iβ是输入参数。新的角度可告知FOC算法下一个电压矢量在何处。
6、通过使用新的角度,可将PI控制器的Vd和Vq输出值逆变到静止参考坐标系。该计算将产生下一个正交电压值Vα和Vβ。
7、Vα和Vβ值经过逆变换得到3相值Va、Vb和Vc。该3相电压值可用来计算新的PWM占空比值,以生成所期望的电压矢量。
以后会对每一过程进行详解的。

