
- 1低代码平台的使用学习_低代码开发平台怎么用
- 2数据库---主要约束操作讲解_增加约束默认值
- 3阿里CICD流水线Docker部署,将阿里镜像私仓中的镜像部署到服务器中
- 4在Android上模拟摄像头_安卓虚拟摄像头
- 5无法建立SSH链接和Password Authentication Failed,Please verify that the username and password are correct解决_ssh authentication failed
- 6自学鸿蒙应用开发(40)- 真机调试之准备真机_鸿蒙真机调试如何选择真机
- 7Docker镜像重命名和删除镜像,重命名 docker 容器名和删除容器名以及扩展命令_docker重命名容器
- 8【2023中国算力大会】《关于促进全国一体化算力网络国家枢纽节点宁夏枢纽建设若干政策的意见》解读_宁夏关于算力政策
- 97z替换exe文件内容不能替换文件_Windows小技巧 批处理文件实现目录下文件批量打包压缩...
- 10界面控件DevExpress WinForms/WPF v23.2 - 电子表格支持表单控件
mipi接口的摄像头驱动并发布话题_0x84201000
赞
踩
情况: 需要跑ORBSLAM, 之前一直使用USB接口的相机, 打开摄像头一般使用的是ROS下的usb-cam-node进行驱动,采集图像并发布成topic的形式,或者使用opencv的videoCapture进行图像的捕捉;
因为某些原因需要将usb接口的camera转换成mipi接口的相机; 还是使用了原先usb_cam_node进行摄像头的驱动,输入/dev/video, 对应的width和height之后,结果出现了如下的提示:

最主要的就是[ERROR], 提示如下:
[ERROR] [1608815170.494006746]: /dev/video4 is no video capture device capability is 2216693760在usb_cam_node中找到对应的代码如下:
- if (!(cap.capabilities & V4L2_CAP_VIDEO_CAPTURE))
- {
- ROS_ERROR_STREAM(camera_dev_ << " is no video capture device capability is " <<cap.capabilities );
- exit(EXIT_FAILURE);
- }
这里的cap是v4l2_capability类型的变量,
- struct v4l2_capability
- {
- u8 driver[16]; // 驱动名字
- u8 card[32]; // 设备名字
- u8 bus_info[32]; // 设备在系统中的位置
- u32 version; // 驱动版本号
- u32 capabilities; // 设备支持的操作
- u32 reserved[4]; // 保留字段
- };
将2216693760转换成十六进制即为: 0x84201000, 对应到v4l2_capability所表示的devide的所支持的操作分别是:
- V4L2_CAP_DEVICE_CAPS
- V4L2_CAP_STREAMING
- V4L2_CAP_EXT_PIX_FORMAT
- V4L2_CAP_VIDEO_CAPTURE_MPLANE
其中,最后一项操作的解释如下:
- /* Is a video capture device that supports multiplanar formats */
- #define V4L2_CAP_VIDEO_CAPTURE_MPLANE 0x00001000
而对应到usb_cam.cpp中报错部分的代码, 需要的是支持下面两种操作的设备:
- V4L2_CAP_VIDEO_CAPTURE
- V4L2_CAP_STREAMING
接下来对V4L2一个简单的总结:
Video for Linuxtwo(Video4Linux2)简称V4L2,是V4L的改进版。V4L2是linux操作系统下用于采集图片、视频和音频数据的API接口,配合适当的视频采集设备和相应的驱动程序,可以实现图片、视频、音频等的采集。在远程会议、可视电话、视频监控系统和嵌入式多媒体终端中都有广泛的应用。
在Linux下,所有外设都被看成一种特殊的文件,成为“设备文件”,可以象访问普通文件一样对其进行读写。一般来说,采用V4L2驱动的摄像头设备文件是/dev/video0。V4L2支持两种方式来采集图像:内存映射方式(mmap)和直接读取方式(read)。V4L2在include/linux/videodev.h文件中定义了一些重要的数据结构,在采集图像的过程中,就是通过对这些数据的操作来获得最终的图像数据。Linux系统V4L2的能力可在Linux内核编译阶段配置,默认情况下都有此开发接口。
应用程序通过V4L2进行视频采集的原理
V4L2支持内存映射方式(mmap)和直接读取方式(read)来采集数据,前者一般用于连续视频数据的采集,后者常用于静态图片数据的采集,本文重点讨论内存映射方式的视频采集。
应用程序通过V4L2接口采集视频数据分为五个步骤:
首先,打开视频设备文件,进行视频采集的参数初始化,通过V4L2接口设置视频图像的采集窗口、采集的点阵大小和格式;
其次,申请若干视频采集的帧缓冲区,并将这些帧缓冲区从内核空间映射到用户空间,便于应用程序读取/处理视频数据;
第三,将申请到的帧缓冲区在视频采集输入队列排队,并启动视频采集;
第四,驱动开始视频数据的采集,应用程序从视频采集输出队列取出帧缓冲区,处理完后,将帧缓冲区重新放入视频采集输入队列,循环往复采集连续的视频数据;
第五,停止视频采集。
具体的程序实现流程可以参考下面的流程图:

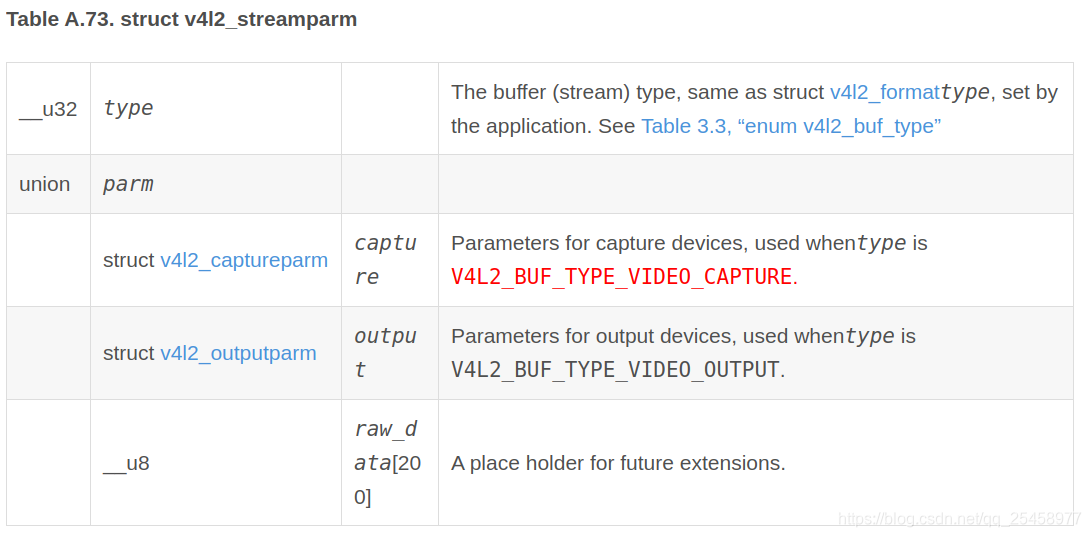
关于usb接口的相机和MIPI接口的相机之间还有一个需要注意的区别是如下的类型:
- /* Stream type-dependent parameters
- */
- struct v4l2_streamparm {
- __u32 type; /* enum v4l2_buf_type */
- union {
- struct v4l2_captureparm capture;
- struct v4l2_outputparm output;
- __u8 raw_data[200]; /* user-defined */
- } parm;
- };
结构体包含两个结构体, 但是需要注意的v4l2_captureparm只能用于CAPTURE type, 而mipi接口的摄像头是不具有这种操作性的,即capability中没有这项
其对应的相关调用如下:
- 函数:ioctl(fd,VIDIOC_G_PARM,struct v4l2_streamparm *argp); //VIDIOC_S_PARM
-
- 作用:流相关 (如帧率)
如有疑问,欢迎交流: wx: baobaohaha_ 欢迎对SLAM有兴趣的小伙伴一起交流学习~~
参考:
V4L2官网讲解 英文

