
- 1智能学习 | MATLAB实现PSO-SVM多输入单输出回归预测(粒子群算法优化支持向量机)_matlab svm预测模型 多输入
- 27个最佳的人工智能开发的Python库_python人工智能项目
- 3Kafka 核心技术与实战学习笔记(十五) 消费者组_kafak 一个 group 下该有多少个 consumer 实例
- 4数据结构预算法之列表
- 5微服务(学习)
- 6基于动态规划的水库优化调度_基于动态规划的水电站水库中长期发电优化调度
- 7记录--vue3+setup+ts 知识总结
- 8ICCV 2023 | APE: 高效的 CLIP 图像分类适配算法,比 Tip-Adapter 参数少30倍
- 9谷歌联合UC伯克利提出大模型代码调试框架Self-Debug_self-debug(大模型代码调试框架)是否开源
- 10STL之Map遍历_stl遍历map
Jetson nano跟着教程无脑部署YOLOV5_jetson nano wunao
赞
踩
一、官方镜像的烧录
1.下载官方镜像
百du网盘:https://pan.baidu.com/s/1zxwG9tm0Tbhg2vMSPMKwpQ
提取码:ej73
2.格式化SD卡
我用的这个软件,感觉挺好用的找到破解版,哈哈。。
百du网盘:https://pan.baidu.com/s/15G4m_9LMTAE11raN67A_zw
提取码:jg9a

3.烧录镜像软件

烧录完成后还有个验证,要点时间等。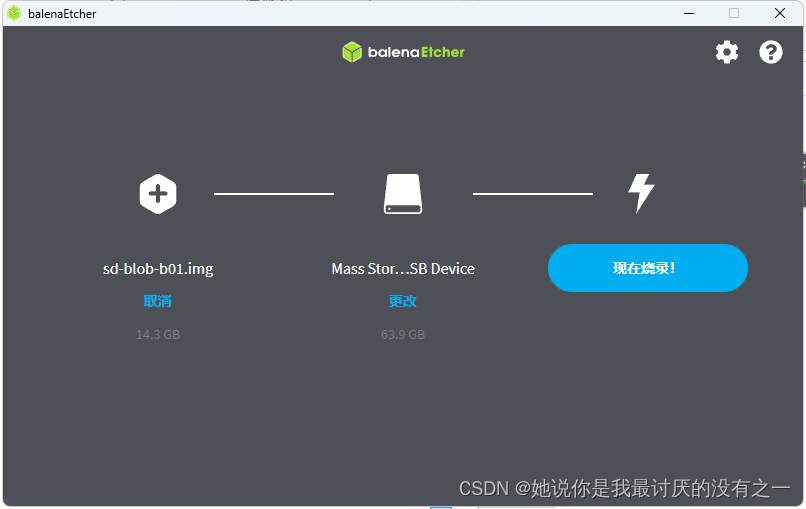

4.原神,启动!!
这个梗是这样,没玩过原神!
5.给个root
sudo passwd root
设置root密码
二、抓紧时间干活
ubuntu第一步还是换源。
1.备份一下
- sudo cp /etc/apt/sources.list /etc/apt/sources.list.bak
- sudo gedit /etc/apt/sources.list
2.换源
- deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
- deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
- deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
- deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
- deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic main multiverse restricted universe
- deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-security main multiverse restricted universe
- deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-updates main multiverse restricted universe
- deb-src http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ bionic-backports main multiverse restricted universe
也可以换成别的源,根据自己的感觉搞。
3.添加cuda的环境变量
gedit ~/.bashrc
在后面添加以下内容
- export PATH=/usr/local/cuda-10.2/bin${PATH:+:${PATH}}
- export LD_LIBRARY_PATH=/usr/local/cuda-10.2/lib64${LD_LIBRARY_PATH:+:${LD_LIBRARY_PATH}}
- export CUDA_ROOT=/usr/local/cuda
保存退出后更新一下
source ~/.bashrc
然后检查一下配置是否OK
nvcc -V
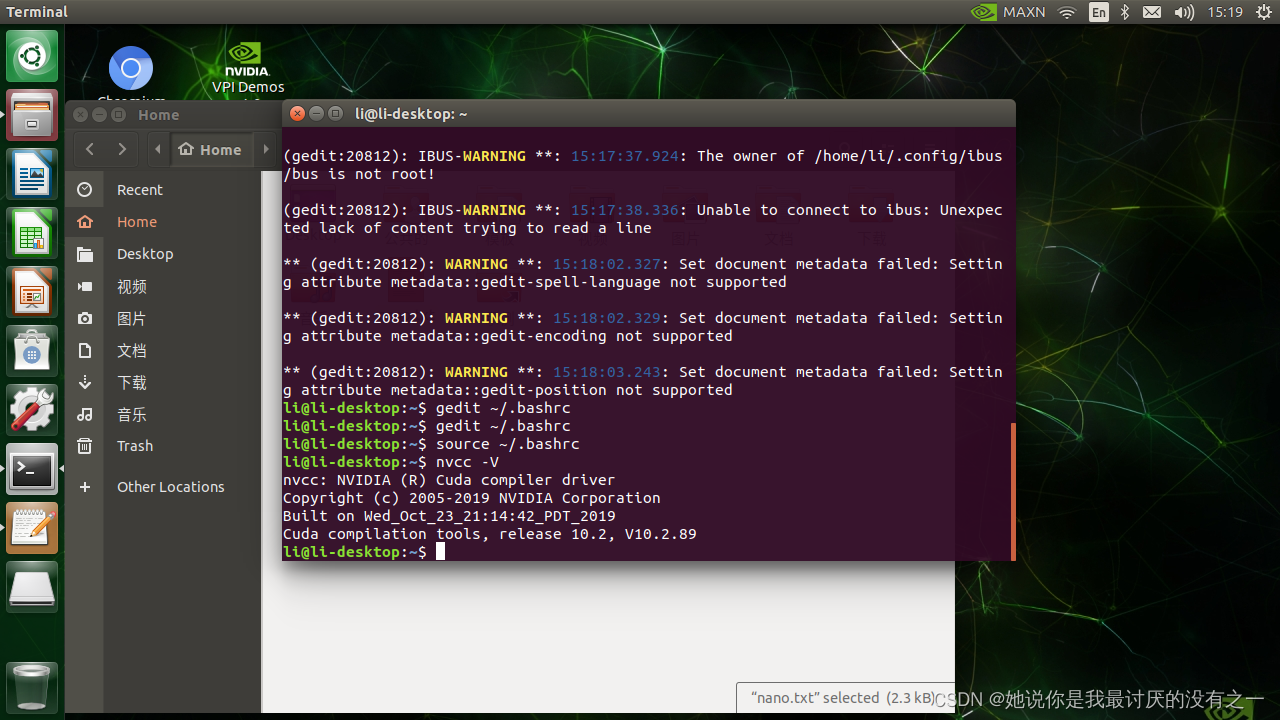
检查完后我们继续往下
4.安装pip3
- sudo apt-get update
- sudo apt-get install python3-pip python3-dev -y
- 然后再更新一下pip3吧
- pip3 install --upgrade pip
- 后面我在配置的时候有个报错要升级一下
查看python3的版本3.6.9 。。
5.下库
- sudo apt-get install build-essential make cmake cmake-curses-gui -y
- sudo apt-get install git g++ pkg-config curl -y
- sudo apt-get install libatlas-base-dev gfortran libcanberra-gtk-module libcanberra-gtk3-module -y
- sudo apt-get install libhdf5-serial-dev hdf5-tools -y
- sudo apt-get install nano locate screen -y
这个下载基本上没什么问题,很容易就安装好了。。。
6.依赖环境
- sudo apt-get install libfreetype6-dev -y
- sudo apt-get install protobuf-compiler libprotobuf-dev openssl -y
- sudo apt-get install libssl-dev libcurl4-openssl-dev -y
- sudo apt-get install cython3 -y
这里也没什么问题
7.OpenCV一些依赖和库
- sudo apt-get install build-essential -y
- sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev -y
- sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff5-dev libdc1394-22-dev -y
- sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev liblapacke-dev -y
- sudo apt-get install libxvidcore-dev libx264-dev -y
- sudo apt-get install libatlas-base-dev gfortran -y
- sudo apt-get install ffmpeg -y
到目前位置这里都很顺利。。
8.更新cmake
百du网盘:https://pan.baidu.com/s/1yI1cdaMR_Q9-xwuR-C51-Q
提取码:dciv
也可以自己下载,网址http://www.cmake.org/files/v3.13/cmake-3.13.0.tar.gz
- tar xpvf cmake-3.13.0.tar.gz cmake-3.13.0/ #解压
- cd cmake-3.13.0/
- ./bootstrap --system-curl # 时间有点长
- make -j4 #编译 时间有点长
- echo 'export PATH=~/cmake-3.13.0/bin/:$PATH' >> ~/.bashrc #添加环境变量
- source ~/.bashrc #更新.bashrc
三、pytorch1.8.0
1.下载
https://forums.developer.nvidia.com/t/pytorch-for-jetson-version-1-9-0-now-available/72048
找到1.8的版本下载
或者网盘下载
百du网盘:https://pan.baidu.com/s/1WUKz7_BdEcFOiNX_bSCkCw
提取码:3sbm
下载完后
sudo pip3 install #把文件拖过来即可![]()
注意这个地方用国内的网好像下载不下来,我是用了别的方法。。。。
四、安装torchvision 0.9.0版本
这里要注意,版本都是对应的不能太高不能太低。所以适合就好,继续。
1.上依赖
- sudo apt-get install libopenmpi2
- sudo apt-get install libopenblas-dev
- sudo apt-get install libjpeg-dev zlib1g-dev
2.安装
https://github.com/pytorch/vision
里面0.7的版本
百du网盘:https://pan.baidu.com/s/1U3z1rMUaI22Whrsye29Xsg
提取码:3daq
- 用unzip命令解压文件后
- cd torchvision# 进入到这个包的目录下
- export BUILD_VERSION=0.9.0
- 下载也需要用外网,我一开始用国内的网下载后,报错链接超时。。。
- sudo python3 setup.py install # 安装 时间有点.....
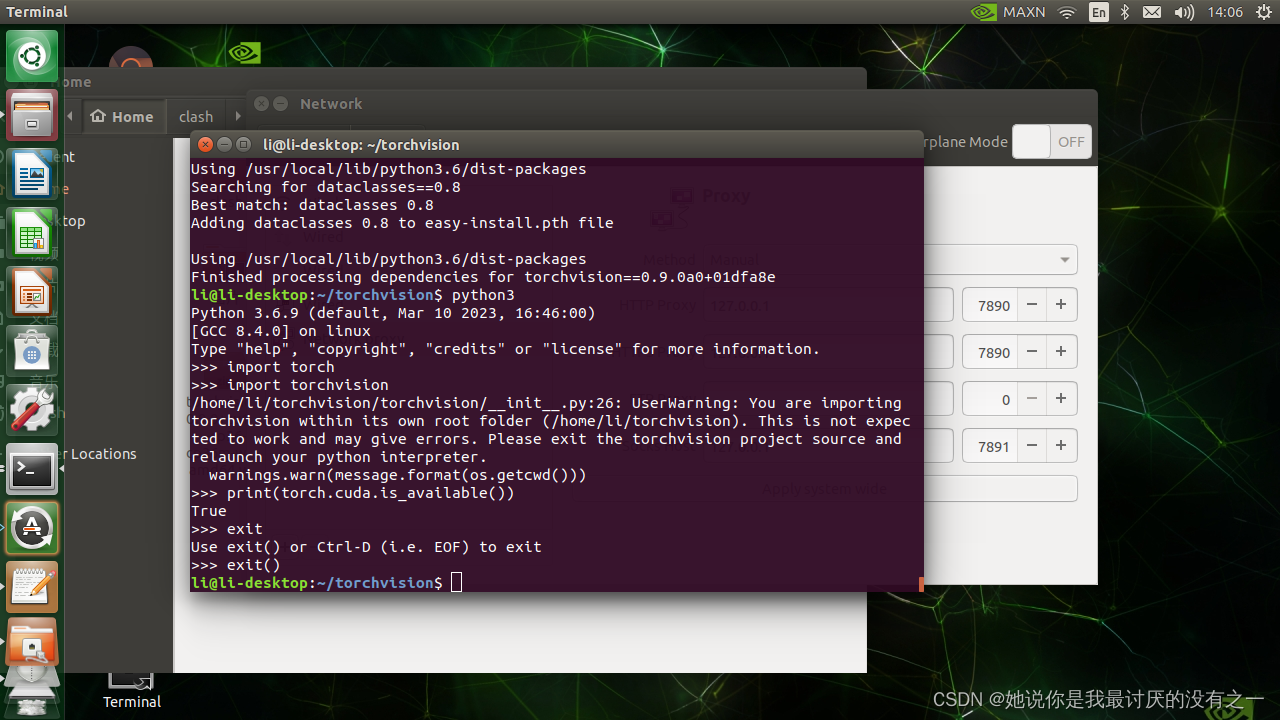
3.检查一下安装是否成功
- python3
- import torch
- import torchvision
- print(torch.cuda.is_available()) #输出True,就OK!!!!
- exit() # 最后退出python编译
五、下一些要跑yolo的包
1.注意!!!
有些连接问题的话可以在安装的后面加上-i +源
例如: -i https://pypi.tuna.tsinghua.edu.cn/simple 来使用清华镜像源
2.继续下载。。。
- sudo pip3 install matplotlib==3.2.2
- sudo pip3 install --upgrade Cython #更新一下这个包
- sudo apt-get remove python-numpy
- sudo apt-get remove python3-numpy
- sudo pip3 install numpy==1.19.4 -i https://pypi.tuna.tsinghua.edu.cn/simple
- 如果下载错误更新pip
- pip3 install --upgrade pip
- 再更新
- pip3 install --upgrade setuptools
- 我是这样解决的。。。
- sudo pip3 install scipy==1.4.1. # 这个包安装巨慢
- sudo pip3 install tqdm==4.61.2
- sudo pip3 install seaborn==0.11.1
- sudo pip3 install scikit-build==0.11.1 # 安装opencv需要这个包
- sudo pip3 install opencv-python==4.5.3.56
- sudo pip3 install tensorboard==2.5.0
- sudo pip3 install --upgrade PyYAML
- # 我升级到了5.4.1 也可以sudo pip3 install PyYAML==5.4.1
- 之后我在梳理的时候,这个地方出现了问题,如果这里更新出现报错,先放一放。。。
- sudo pip3 install thop
- sudo pip3 install pycocotools
六、试跑yolov5
1.
下载官网对应的文件![]() https://github.com/ultralytics/yolov5/tree/v5.0
https://github.com/ultralytics/yolov5/tree/v5.0
网盘链接,提取码:nr2t。
在此文件中打开终端pip3 install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple
然后上面 PyYAML没更新完成的也解决了。。(不明白不理解&……%¥)
2.
下载对应的权重![]() https://github.com/ultralytics/yolov5/releases/tag/v5.0
https://github.com/ultralytics/yolov5/releases/tag/v5.0
 网盘链接,提取码:h6g3。
网盘链接,提取码:h6g3。
3.
把权重复制到yolov5的文件下
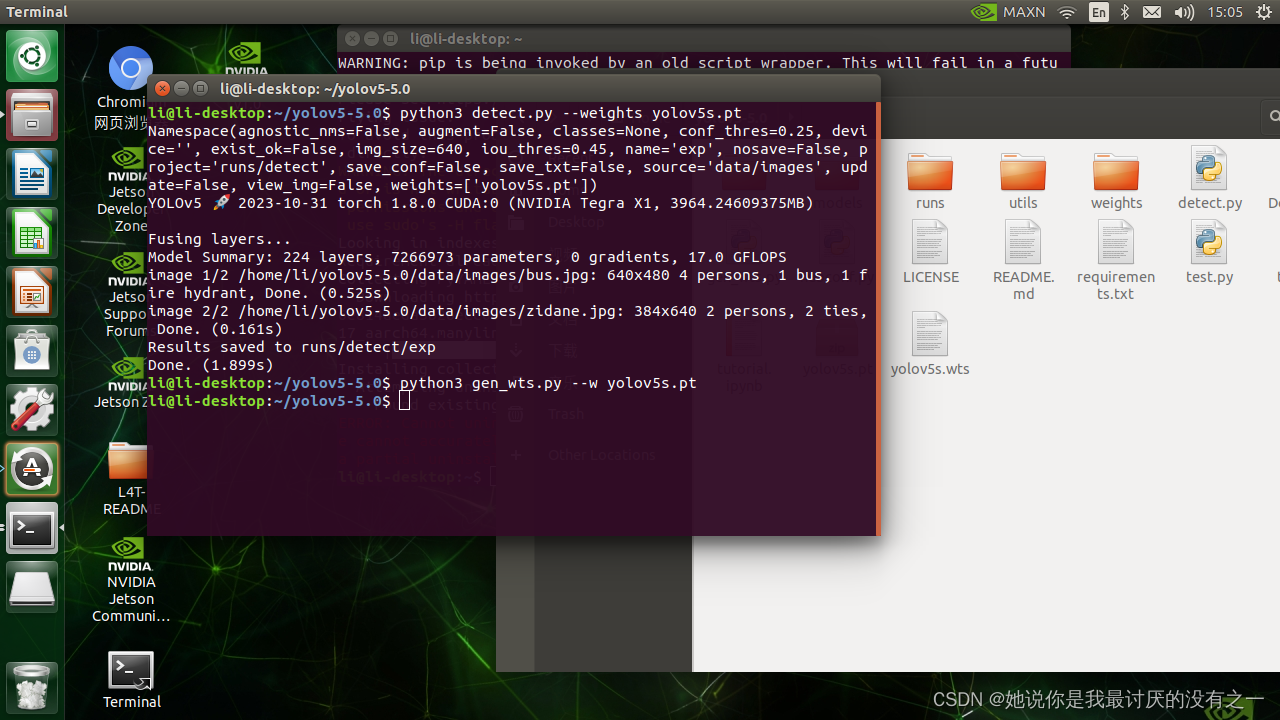
然后在此文件夹下打开终端 python3 detect.py --weights yolov5s.pt
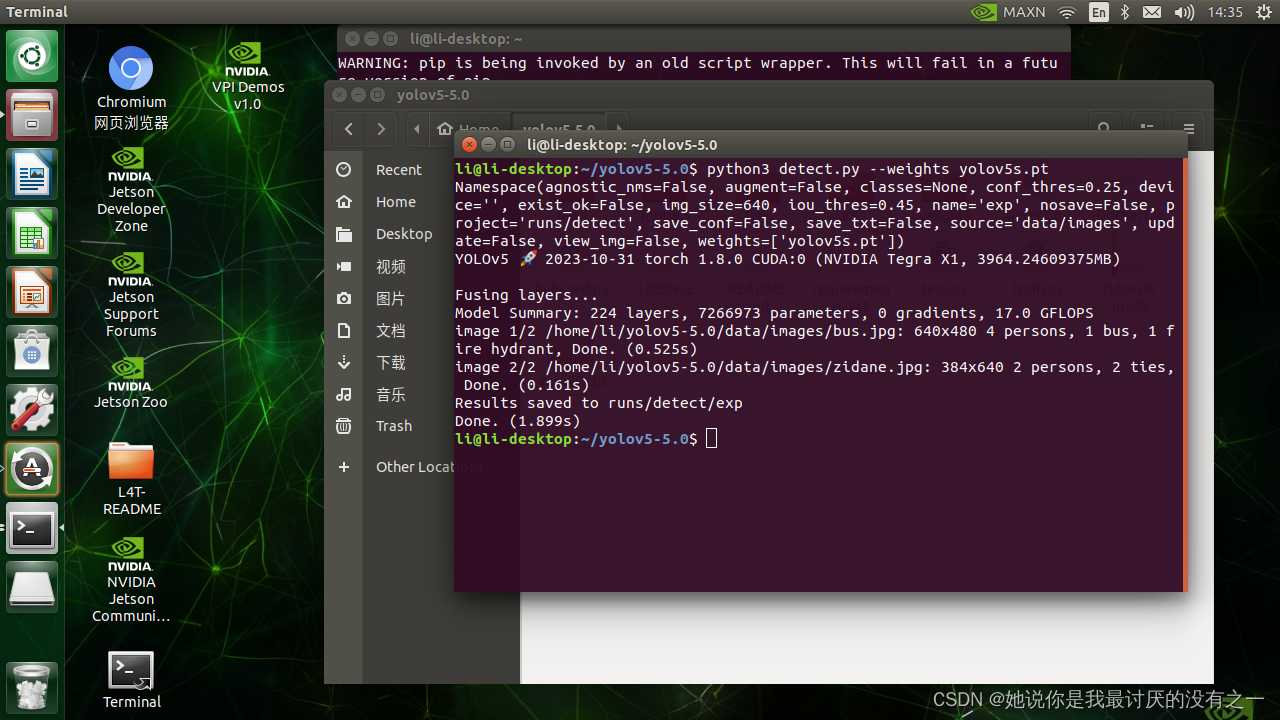
这样就没问题了。也是很顺利! 跑完后在runs文件夹里有两个图片可以看看效果。。
七、部署yolov5
1.下载TensorrT项目
TensorrT网址![]() https://github.com/wang-xinyu/tensorrtx/tree/yolov5-v5.0
https://github.com/wang-xinyu/tensorrtx/tree/yolov5-v5.0
2.生成wts文件
进入文件中的yolov5找到gen_wts.py文件复制到yolov5-5.0中
输入python3 gen_wts.py --w yolov5s.pt 生成wts文件。
3.构建项目
然后把生成的wts文件复制到tensorrtx中的yolov5的文件夹中。。
- mkdir ljr #建一个文件夹
- cd ljr
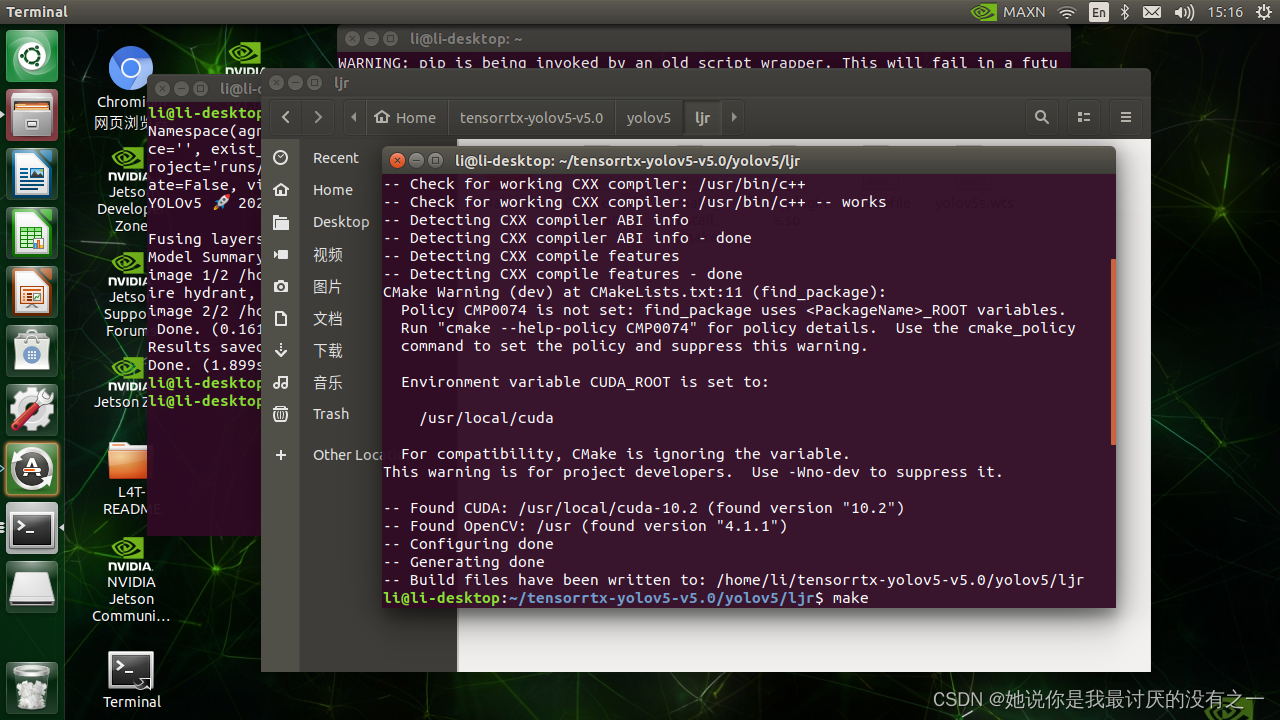
- cmake .. #构建项目
- #然后把wts文件复制到ljr中
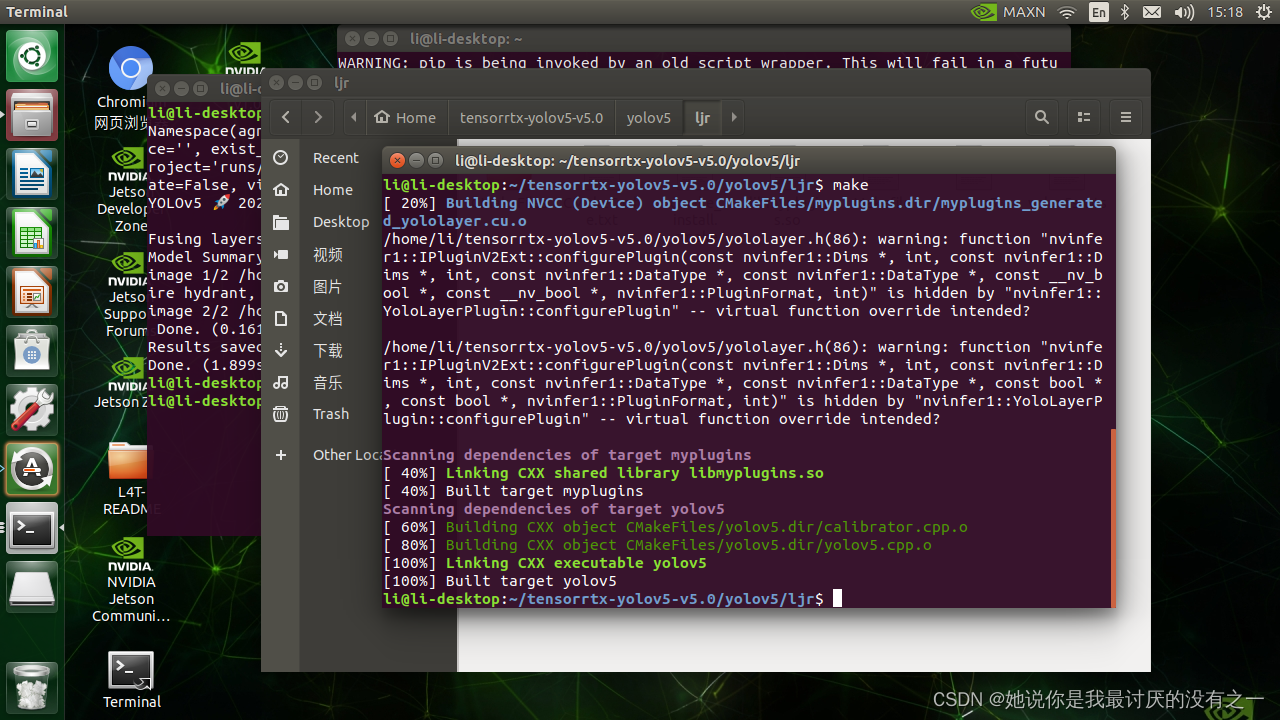
- make
4.生成引擎文件
继续在自己创建的文件下的终端输入命令把yolov5s.wts文件转为.engine(引擎文件)
sudo ./yolov5 -s yolov5s.wts yolov5s.engine s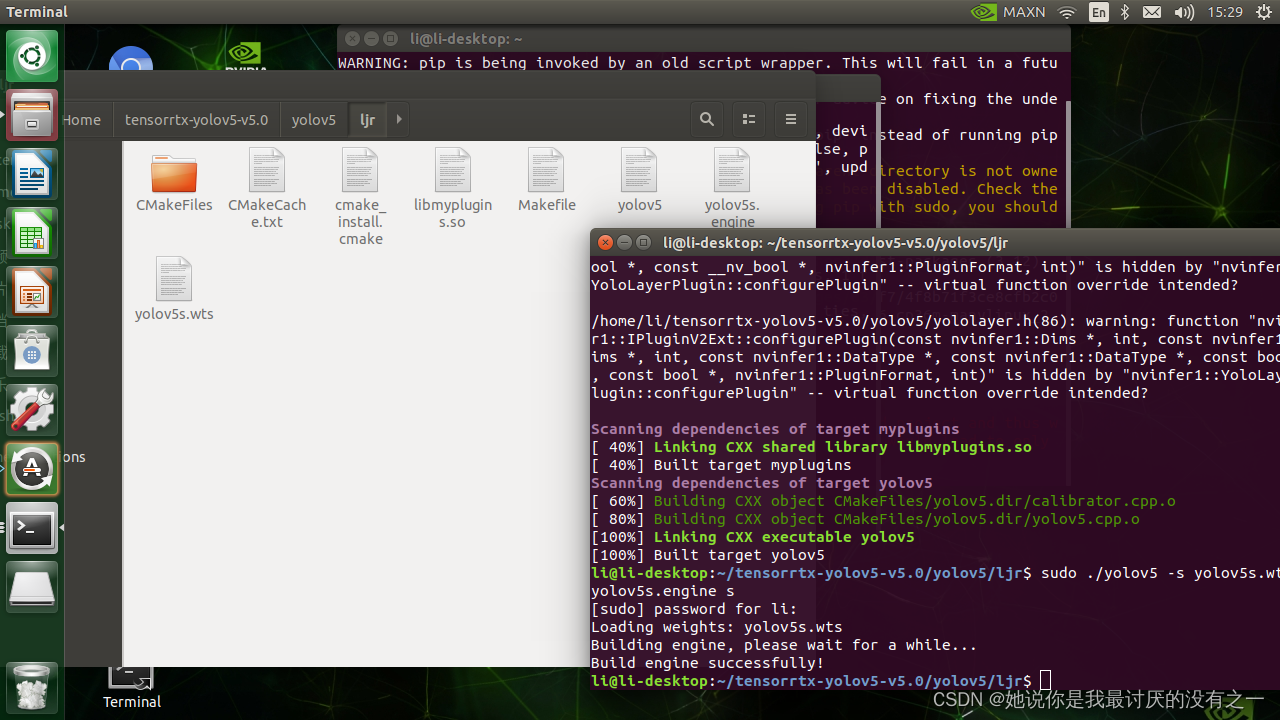 6.测试
6.测试
在tensorrtx-yolov5-v5.0\yolov5下新建sample文件夹,在里面放一张需要测试的图片(尽量放人的图片)进行测试。。在ljr文件下打开终端输入
sudo ./yolov5 -d yolov5s.engine ../sample/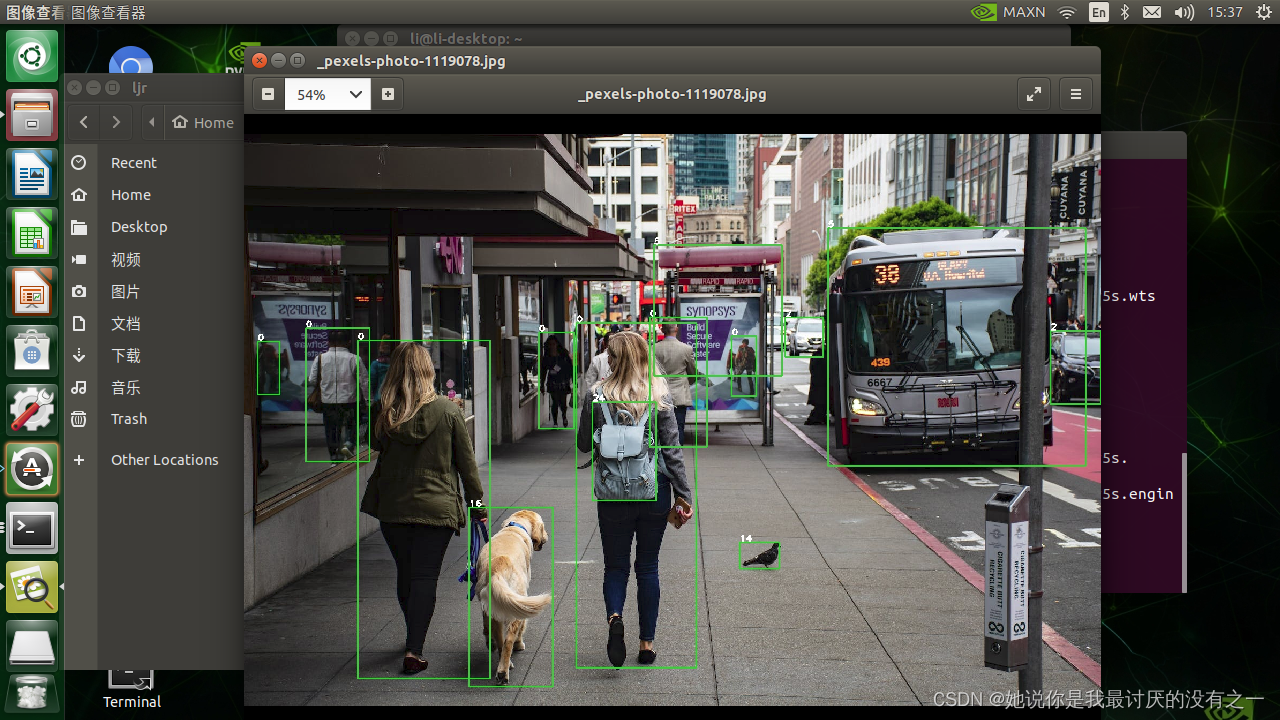
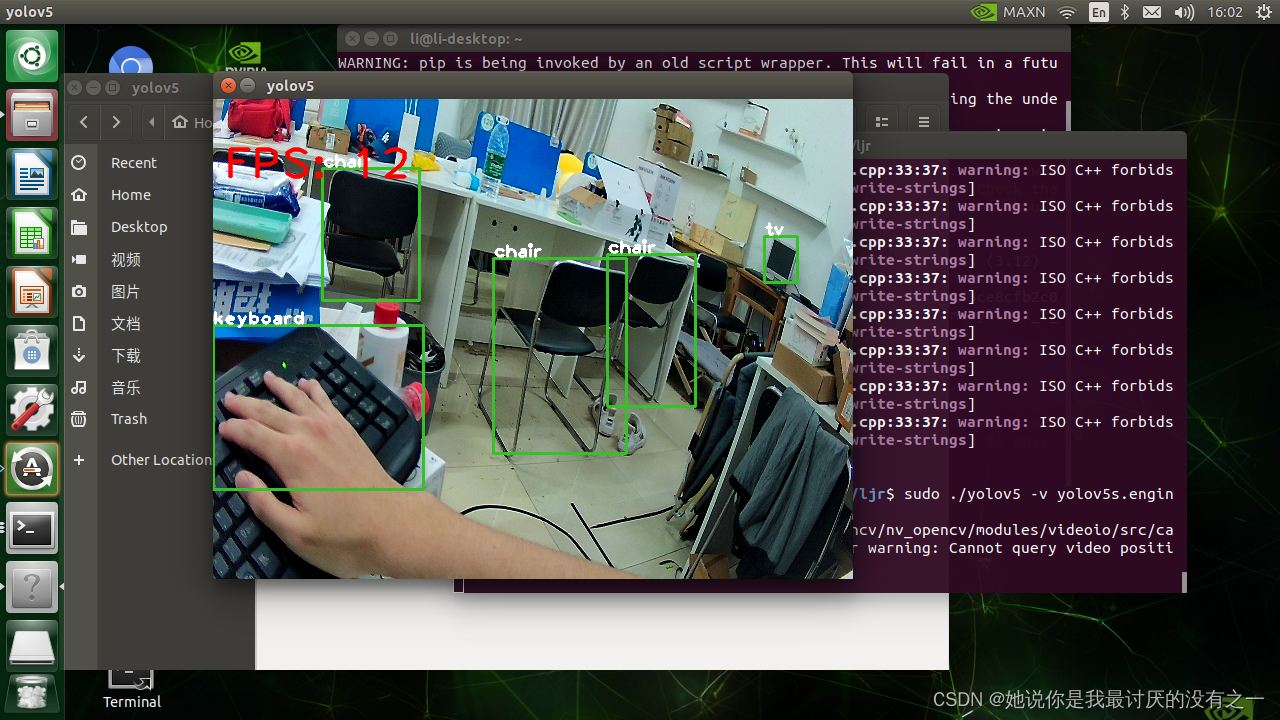
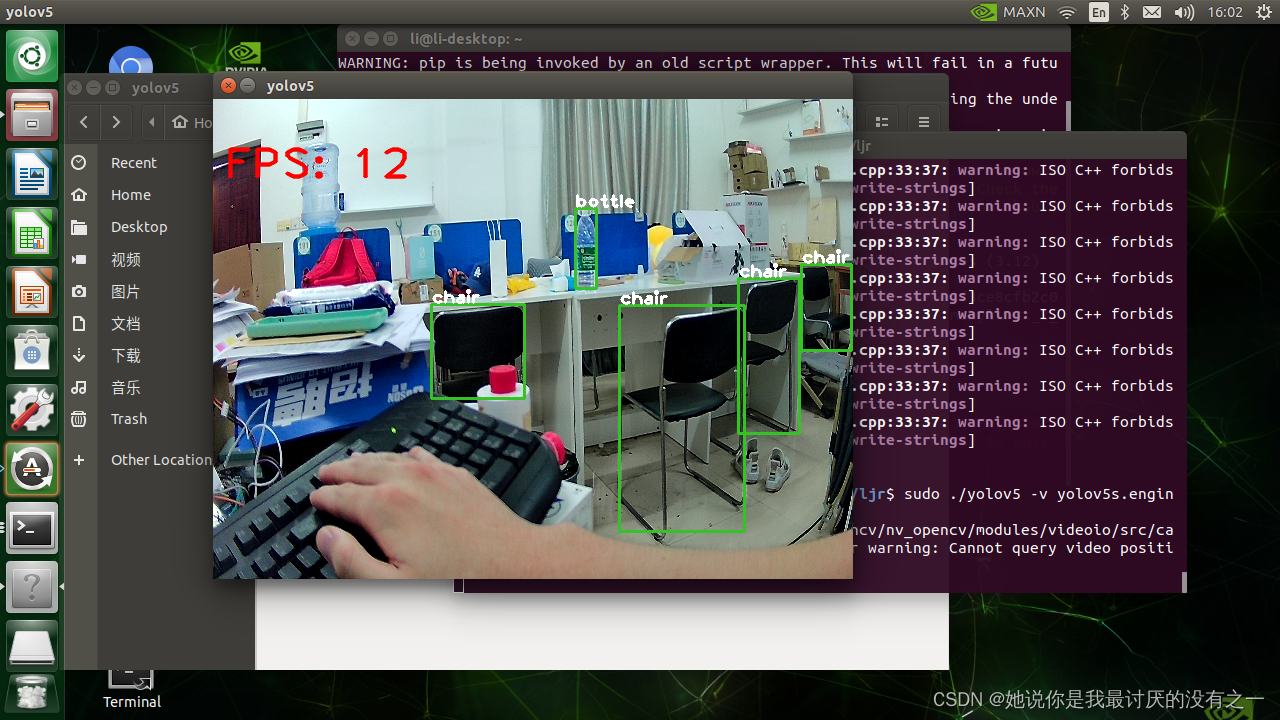
7.调用摄像头
测试图片看不出效果,并且真正部署到生产环境,交付给用户使用.是通过调用摄像头.所以要改一下tensorrtx-yolov5-v5.0 -> yolov5.cpp
在ljr文件夹中make一下(只要是修改了yolov5.cpp就要重新make)
sudo ./yolov5 -v yolov5s.engine完成摄像头的调用就可以了。。(有可能摄像头调用不成功index 改成0,反正就是0或者1吧)
ls /dev/video #加上tab键查看吧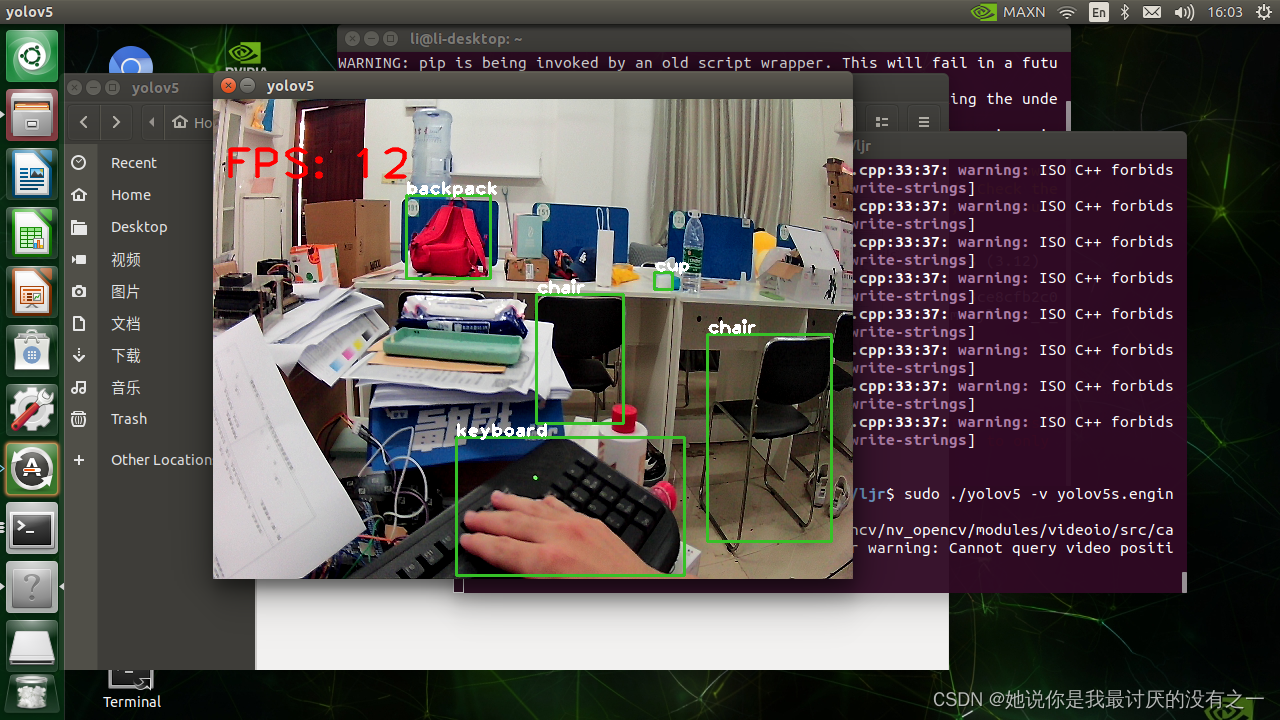
到这里这个文章就结束。但是这只是配了个环境和调用摄像头,用自己的模型还需要继续研究,后面有机会也会从打标签到部署自己模型一步一步的教程。。


