
- 100后老油条表示真干不过,公司新来的00后测试员已把我卷崩溃了...
- 2Linux学习之Tcp与Udp
- 3【PIXHAWK2.4.8故障记录】_pixhawk系统拒绝解锁
- 4IT职场新人如何自我提升的思考_it自我提升关键点有哪些
- 5大都会人寿三周的工作回顾_大都会上班工作真实
- 6hive mysql类型_Hive & Mysql 数据类型和文件格式
- 7python写一个简单的爬虫程序(爬取快手)(附源码)_快手爬虫
- 8Llama2-Chinese:一款强大的本地化工具,助力你的应用走向全球
- 9DSP实验箱_嵌入式教学实验箱_操作教程:2-17 AD9833波形发生器实验
- 10opencv-python最全下载地址_opencv_python-4.7.0.72-cp37-abi3-win_amd64.whl
【A星算法】A星A*寻路算法详解(小白一看就懂+C#代码+零基础学习A*)
赞
踩
1.问题背景
在制作RPG游戏角色和NPC移动时,需要角色自动避开障碍物,到达终点
怎么快速找到一条到达终点的路径?
使用a星寻路算法
2.A星算法的思路
绿色:起点;红色:终点 ;黑色:障碍物
新增的浅绿方块为当前评估节点
对角线的代价为14.14
直线代价为10
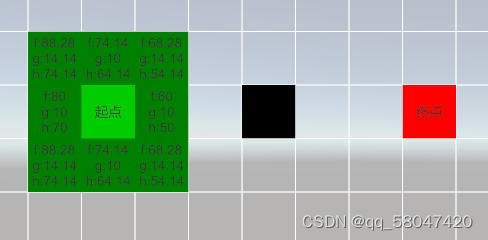
基本概念:
f = g + h
f: 总评估代价
g:起点到当前点的代价
h:当前点到终点的预期(或理想)代价(如果当前评估点到终点的直线上没有障碍物,则当前的总代价f不会改变)
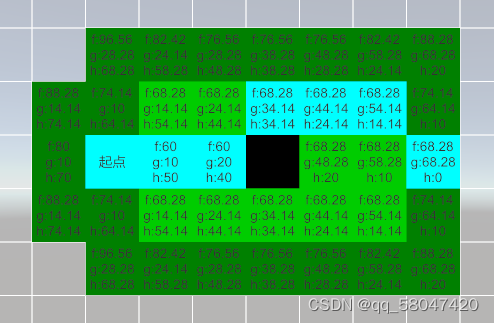
将总代价f作为权重,每次优先遍历最小的f节点
a星算法,会在开表中寻找总花费最小的节点为评估点,遍历当前评估点附近点,在附近点,选择总代价最小的点作为评估点的下一节点
1.初始化起点,终点;将起点放入开表,作为评估点,在开表中选择总代价最小的作为评估节点,如果评估节点为终点,则结束
2.将当前的节点移除开表,放入闭表中(将当前的节点标记为已评估节点)
3.先遍历评估节点周围8个点(上下左右,左上角,右上角,左下角,右下角),将它们放入一个临近点集合中
4.遍历临近点集合,如果闭表已经有该点(该点已经被评估过)或者该点是障碍物,跳过该点
5. 计算 邻近点到起点总花费newcost=当前到邻近点的距离+当前点到起点的花费
6. 1)newGCost 小于之前计算的Gost,说明该点已经被遍历过,在开表中,
说明之前的路径存在绕远路,将邻近点的上一节点改为当前点,计算邻近点的f,g,h花费
2)开表中不包含该邻近点,该节点没有被遍历,不在开表,将邻近点的上一节点改为当前点,
加入开表,计算邻近点的f,g,h花费
7.重复1
上面的过程,如果看不太懂,后面核心代码实现,有代码和注释
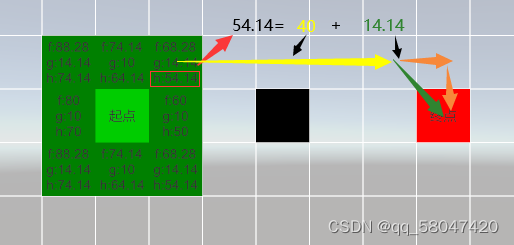
距离的计算
给定两个坐标,计算两个坐标的路径距离
代码 创建APathNode类
3.代码实现
public class APathNode : IComparable<APathNode> { public int X; public int Z; public bool available;//如果是障碍物为false public float GCost = 0;//起点到当前点的花费 public float HCost = 0;//当前点到终点的预期花费 public float TotalCost = 0;//总花费 public APathNode LastNode;//上一个节点 public int CompareTo(APathNode other)//使用最小堆排序,要实现IComparable<APathNode>接口 { if (this.TotalCost>other.TotalCost) { return 1; } else if (other.TotalCost == this.TotalCost) { return 0; } else { return -1; } } }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
代码,创建AStarSearchPath类,下面代码均属于该类
计算两点的距离
public float GetCostByDistance(APathNode currentNode,APathNode neighborNode)
{
float cost = 0;
int Horizontal = Math.Abs(currentNode.X - neighborNode.X);
int Vertical = Math.Abs(currentNode.Z - neighborNode.Z);
int line = Math.Min(Horizontal, Vertical);//对应上图一个橙色箭头
int brokenline = Horizontal + Vertical;//折线
//CurveCostWeigh=14.14f,LineCostWeight=10f
//cost= 曲线价值 + 直线价值
//cost= 曲线价值 + brokenline(1黄+2橙)-2*line(橙)
cost = line * CurveCostWeigh+(brokenline-2*line)*LineCostWeight;
return cost;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
寻找附近的邻近点
private List<APathNode> GainNeighborNode(APathNode currentNode) { List<APathNode> neighborNodes = new List<APathNode>(); for (int i = -1; i <2 ; i++) { for (int j = -1; j < 2; j++) { if(i==0&&j==0) continue;//排除当前节点 int x = currentNode.X + i; int z = currentNode.Z + j; if (x >= 0 && x < width && z >= 0 && z < height) { neighborNodes.Add(Map[z, x]);//在范围的邻近点加入集合 } } } return neighborNodes; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
得到最后的寻路节点集合
private void RetracePath()
{
FinalPaths = new List<APathNode>();
APathNode point = EndPathNode;
while (point!=null)
{
FinalPaths.Add(point);
point = point.LastNode;
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
寻路方法核心代码
public void SearchPath() { //将起点加入开表 OpenList.Add(StartPathNode);//APathNode while(OpenList.Count>0) { //currentNode = FindMinExpectCost();//寻找总花费最小节点 currentNode = OpenList.Dequeue();//取出第一元素,在开表中删除 //将当前的节点移除开表,放入闭表中(将当前的节点标记为已评估节点) //OpenList.Remove(currentNode);删除 CloseList.Add(currentNode); //如果评估点等于终点,结束寻路 if (currentNode == EndPathNode) { RetracePath(); //找到寻路路径 Debug.Log("---找到了"); return; } else { //遍历评估节点周围8个点(上下左右,左上角,右上角,左下角,右下角) List<APathNode> neighborNodes = GainNeighborNode(currentNode); for (int i = 0; i < neighborNodes.Count; i++) { //如果闭表已经有该点(该点已经被评估过)或者该点是障碍物 if (CloseList.Contains(neighborNodes[i]) || !neighborNodes[i].available) { continue; } //新的 起点->neighbor =当前点->邻近点 +当前点->起点 //计算 该邻近点到起点总花费=当前到邻近点的距离+当前点到起点的花费 float newGCost = GetCostByDistance(currentNode, neighborNodes[i]) + currentNode.GCost; //1.如果邻近点到起点总花费<之前已计算的花费,说明之前的路径存在绕远路,将邻近点的上一节点改为当前点 //因为计算过邻近点Gcost,所有一定存在开表中,后面值为false //2》.开表中不包含邻近点,该节点没有被遍历 if (newGCost < neighborNodes[i].GCost || !OpenList.Contains(neighborNodes[i])) { //更新邻近点的三大代价,将邻近点的上一节点设置为当前节点 neighborNodes[i].GCost = newGCost; neighborNodes[i].HCost = GetCostByDistance(neighborNodes[i], EndPathNode); neighborNodes[i].TotalCost = neighborNodes[i].GCost + neighborNodes[i].HCost; neighborNodes[i].LastNode = currentNode; if (!OpenList.Contains(neighborNodes[i])) { OpenList.Add(neighborNodes[i]);//2》.如果开表中不包含邻近点,该节点没有被遍历 } } } } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
代码初始化地图大小,障碍物坐标,起点终点坐标
public void initMapData2(Vector2 startPoint,Vector2 endPoint,Vector2 rect, GameObject root=null) { this.startPoint = startPoint; this.endPoint = endPoint; //初始化地图高度,宽度 this.width = (int)rect.x; this.height = (int)rect.y; if (startPoint.x <= 0 || startPoint.x > width||startPoint.y <= 0 || startPoint.y > height) { throw new Exception("输入的startPoint超出范围"); } if (endPoint.x <= 0 || endPoint.x > width||endPoint.y <= 0 || endPoint.y > height) { throw new Exception("输入的endPoint超出范围"); } Map = new APathNode[height, width]; for (int i = 0; i <height; i++) { for (int j = 0; j < width; j++) { #region 基于自己的规则设置障碍物 GameObject c=root.transform.GetChild((i*width)+j).gameObject; Map[i, j] = new APathNode(); Map[i, j].X = j; Map[i, j].Z = i; Color color = c.GetComponent<MPImage>().color; if (color.r<=0&&color.g<=0&&color.b<=0) #endregion 基于自己的规则设置障碍物 { Debug.Log("false"); Map[i, j].available = false; } else { Debug.Log("true"); Map[i, j].available = true; } } } StartPathNode = new APathNode(); EndPathNode = new APathNode(); StartPathNode = Map[(int)startPoint.y, (int)startPoint.x]; EndPathNode = Map[(int)endPoint.y, (int)endPoint.x]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
AStarSearchPath类的属性
public float LineCostWeight = 10f;
public float CurveCostWeigh = 14.14f;
//public List<APathNode> OpenList=new List<APathNode>();
public PriorityQueue<APathNode> OpenList=new PriorityQueue<APathNode>();//使用最小堆排序,要实现IComparable<APathNode>接口
public List<APathNode> CloseList=new List<APathNode>();
public APathNode currentNode;
public APathNode[,] Map;
public APathNode StartPathNode;
public APathNode EndPathNode;
public int width;
public int height;
public List<APathNode> FinalPaths=new List<APathNode>();
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
4.结束语
希望上面的代码对大家有所帮助,有疑问的地方可以在评论区留言
优化和扩展
平滑路径,生成路径不平滑,删除无用的节点
A星寻路尽管相对于其他算法,效率比较高,但是当地图节点,比较多时,花费时间还是比较多
最小堆,可以优化在openlist开表中取最小花费的时间
拐点算法,只寻找关键的拐点
权重引导寻路,f=g+h+w,权重存储在AStarSearchPath的Map中,提前设置权重小的节点,寻路时,会沿着提前设置的节点寻路
编写地图编辑器,基于游戏引擎,在场景中设置障碍物,用图片保存
如果大家想学习更多的扩展,麻烦大家点赞评论收藏,支持一下,如果有很多人想学习,考虑出更多的关于A星的扩展
补充
实现最小堆排序
增加了PriorityQueue类,修改了AStarSearchPath的OpenList,SearchPath方法currentNode = OpenList.Dequeue();替换了currentNode = FindMinExpectCost();OpenList.Remove(currentNode);
public class PriorityQueue<T> where T : IComparable<T> { private List<T> data; public PriorityQueue() { this.data = new List<T>(); } public void Clear() { data.Clear(); } public bool Contains(T item) { return data.Contains(item); } /// <summary> /// 增加数据到优先队列 /// </summary> /// <param name="item"></param> public void Add(T item) { data.Add(item);//加入到完全二叉树的末尾,新节点依次向上比较父节点 int childIndex = data.Count - 1; while (childIndex > 0) { int parentIndex = (childIndex - 1) / 2;//根据规律,获取父节点 if (data[childIndex].CompareTo(data[parentIndex]) >= 0)//子节点大于父节点,满足最小堆定义,结束 break; T temp = data[childIndex];//子节点小于父节点,交换父子节点 data[childIndex] = data[parentIndex]; data[parentIndex] = temp; childIndex = parentIndex;//子节点等于父节点 } } /// <summary> /// 取出并删除顶部数据 /// </summary> /// <returns></returns> public T Dequeue() { T item = data[0];//暂存第一个 int lastIndex = data.Count - 1; data[0] = data[lastIndex]; data.RemoveAt(lastIndex); --lastIndex; int parentIndex = 0; while (true) { int childIndex = parentIndex * 2 + 1; if (childIndex > lastIndex) { break;//左子节点在范围内 } int rightIndex = childIndex + 1; if (rightIndex <= lastIndex && data[rightIndex].CompareTo(data[childIndex]) < 0) { childIndex = rightIndex;//选择左右最小的子节点,且右节点在范围内 } if (data[parentIndex].CompareTo(data[childIndex]) <= 0) { break;//父节点比子节点小,满足最小堆,结束 } T temp = data[parentIndex]; data[parentIndex] = data[childIndex]; data[childIndex] = temp; parentIndex = childIndex;//父节点等于子节点索引 } return item; } public T Peek() { return data[0]; } public int Count { get { return data.Count; } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82

