
热门标签
热门文章
- 1涨薪80%,从不知名小厂逆袭,坐上美团L8技术专家(面经+心得)_美团 面试流程
- 2Sih换装神器助你秒变时尚达人!AI虚拟换装、换发型轻松搞定!_python 虚拟换装间
- 3【KV260】利用XADC生成芯片温度曲线图_vivado xadc fpga温度
- 4因祸得福!菜鸟程序员,被无良HR欺骗,后来竟“意外”拿下美团25k*15offer!
- 5Job for mysqld.service failed because the control process exited with error code. See “systemctl sta
- 6ElasticSearch 实战:ES中如何进行日期(数值)范围查询_es 查询日期范围
- 7Linux创建远程ssh登录的账号_ssh 开账户
- 8Python安装完成之后,计算机4个应用程序分别有哪些作用?_idle (python 3.11 64-bit)
- 9postgresql的死锁检测机制_postgresql deadlock_timeout
- 10openwrt提供的四个文件分别是干什么的
当前位置: article > 正文
机器人在笛卡尔空间和关节空间的多项式轨迹规划以及matlab代码(三次、五次、七次)_三次多项式轨迹规划
作者:菜鸟追梦旅行 | 2024-05-14 02:28:20
赞
踩
三次多项式轨迹规划
三次多项式轨迹规划:
三次多项式轨迹规划就是s(t)相对于时间t的变化满足三次多项式变化,其表达式如下:

如前文所述:t的取值范围是[0,T],s(t)的取值范围是[0,1], 又因为初始速度和末速度都为0,所以:
![]()
![]()
![]()
S(t)的一阶导数表达式为:
![]()
从而可以计算出对应的系数:

将系数带入到上面的三次多项式,可得到

再将上式代入到路径表达式,即可得到完整的轨迹规划表达式,如下所示:
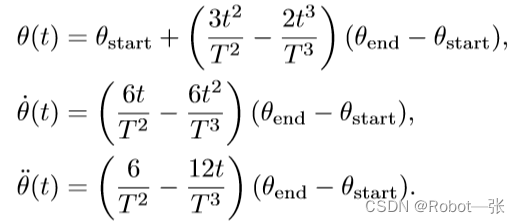
其中,最大的关节速度在![]() 时刻到达,其数值为:
时刻到达,其数值为:

最大的关节加速度和关节减速度在![]() 和
和![]() ,其中:
,其中:

关节空间三次多项式轨迹规划:
- TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
- TH2=[90,54,3,60,80,40,60];
- T=1;%定以一个时间,即从TH1到TH2的总时间。
- TH=[];
- TH_yijie=[];
- TH_erjie=[];
- TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
- for t=0:0.001:T
- th=TH1+(TH2-TH1)*(3*t^2/T^2-2*t^3/T^3);%角度和时间变化关系
- th_yijie=(TH2-TH1)*(6*t/T^2-6*t^2/T^3);%角速度和时间变化关系
- th_erjie=(TH2-TH1)*(6/T^2-12*t/T^3);%角加速度和时间变化关系
- TH=[TH,th'];
- TH_yijie=[TH_yijie,th_yijie'];
- TH_erjie=[TH_erjie,th_erjie'];
- TT=[TT,t];
- end
- TH=TH';%矩阵转置
- TH_yijie=TH_yijie';
- TH_erjie=TH_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
- grid on;
- fig2=figure;
- plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
- grid on;

笛卡尔空间三次多项式轨迹规划:
- A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
- B=[90,54,3];
- T=1;%定义一个时间,即从A到B的总时间。
- X=[];
- X_yijie=[];
- X_erjie=[];
- TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
- for t=0:0.001:T
- x=A+(B-A)*(3*t^2/T^2-2*t^3/T^3);%角度和时间变化关系
- x_yijie=(B-A)*(6*t/T^2-6*t^2/T^3);%角速度和时间变化关系
- x_erjie=(B-A)*(6/T^2-12*t/T^3);%角加速度和时间变化关系
- X=[X,x'];
- X_yijie=[X_yijie,x_yijie'];
- X_erjie=[X_erjie,x_erjie'];
- TT=[TT,t];
- end
- X=X';%矩阵转置
- X_yijie=X_yijie';
- X_erjie=X_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
- grid on;
- fig2=figure;
- plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
- grid on;
五次多项式轨迹规划:
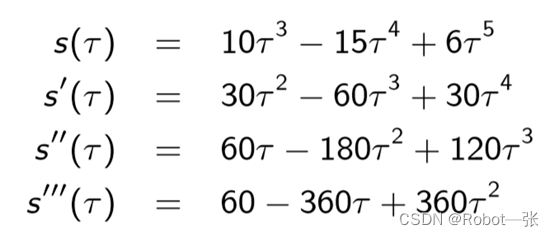
五次多项式轨迹规划就是s(t)相对于时间t的变化满足五次多项式变化,其表达式如下:
![]()
其中:

求出系数如下:
![]()
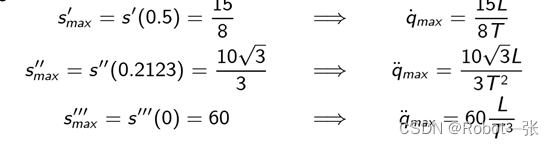
所以其运动方程如下:
各个变量的最值如下:
关节空间五次多项式轨迹规划:
- TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
- TH2=[90,54,3,60,80,40,60];
- T=1;%定以一个时间,即从TH1到TH2的总时间。
- TH=[];
- TH_yijie=[];
- TH_erjie=[];
- TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
- for t=0:0.001:T
- th=TH1+(TH2-TH1)*(10*(t/T)^3-15*(t/T)^4+6*(t/T)^5);%角度和时间变化关系
- th_yijie=(TH2-TH1)*(30*(t/T)^2-60*(t/T)^3+30*(t/T)^4);%角速度和时间变化关系
- th_erjie=(TH2-TH1)*(60*(t/T)-180*(t/T)^2+120*(t/T)^3);%角加速度和时间变化关系
- TH=[TH,th'];
- TH_yijie=[TH_yijie,th_yijie'];
- TH_erjie=[TH_erjie,th_erjie'];
- TT=[TT,t];
- end
- TH=TH';%矩阵转置
- TH_yijie=TH_yijie';
- TH_erjie=TH_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
- grid on;
- fig2=figure;
- plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
- grid on;
笛卡尔空间五次多项式轨迹规划:
- A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
- B=[90,54,3];
- T=1;%定义一个时间,即从A到B的总时间。
- X=[];
- X_yijie=[];
- X_erjie=[];
- TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
- for t=0:0.001:T
- x=A+(B-A)*(10*(t/T)^3-15*(t/T)^4+6*(t/T)^5);%角度和时间变化关系
- x_yijie=(B-A)*(30*(t/T)^2-60*(t/T)^3+30*(t/T)^4);%角速度和时间变化关系
- x_erjie=(B-A)*(60*(t/T)-180*(t/T)^2+120*(t/T)^3);%角加速度和时间变化关系
- X=[X,x'];
- X_yijie=[X_yijie,x_yijie'];
- X_erjie=[X_erjie,x_erjie'];
- TT=[TT,t];
- end
- X=X';%矩阵转置
- X_yijie=X_yijie';
- X_erjie=X_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
- grid on;
- fig2=figure;
- plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
- grid on;
七次多项式轨迹规划:
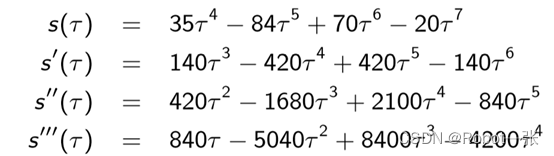
五次多项式轨迹规划就是s(t)相对于时间t的变化满足五次多项式变化,其表达式如下:

其中:

求出系数如下:
![]()
所以其运动方程如下:
各个变量的最值如下:

关节空间七次多项式轨迹规划:
- TH1=[30,60,2,5,50,70,80]; %定义关节空间中的两个点TH1,TH2.
- TH2=[90,54,3,60,80,40,60];
- T=1;%定以一个时间,即从TH1到TH2的总时间。
- TH=[];
- TH_yijie=[];
- TH_erjie=[];
- TT=[];%定以四个变量TH、TH_yijie、TH_erjie、TT,用来储存数据
- for t=0:0.001:T
- th=TH1+(TH2-TH1)*(35*(t/T)^4-84*(t/T)^5+70*(t/T)^6-20*(t/T)^7);%角度和时间变化关系
- th_yijie=(TH2-TH1)*(140*(t/T)^3-420*(t/T)^4+420*(t/T)^5-140*(t/T)^6);%角速度和时间变化关系
- th_erjie=(TH2-TH1)*(420*(t/T)^2-1680*(t/T)^3+2100*(t/T)^4-840*(t/T)^5);%角加速度和时间变化关系
- TH=[TH,th'];
- TH_yijie=[TH_yijie,th_yijie'];
- TH_erjie=[TH_erjie,th_erjie'];
- TT=[TT,t];
- end
- TH=TH';%矩阵转置
- TH_yijie=TH_yijie';
- TH_erjie=TH_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,TH(:,1));%三维绘图此处绘制一轴关节角度变化示意。
- grid on;
- fig2=figure;
- plot(TT,TH_yijie(:,1));%三维绘图此处绘制一轴关节角速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,TH_erjie(:,1));%三维绘图此处绘制一轴关节角加速度变化示意。
- grid on;
笛卡尔空间七次多项式轨迹规划:
- A=[30,60,2]; %定义笛卡尔空间中的两个点A,B.
- B=[90,54,3];
- T=1;%定义一个时间,即从A到B的总时间。
- X=[];
- X_yijie=[];
- X_erjie=[];
- TT=[];%定以四个变量X、X_yijie、X_erjie、TT,用来储存数据
- for t=0:0.001:T
- x=A+(B-A)*(35*(t/T)^4-84*(t/T)^5+70*(t/T)^6-20*(t/T)^7);%角度和时间变化关系
- x_yijie=(B-A)*(140*(t/T)^3-420*(t/T)^4+420*(t/T)^5-140*(t/T)^6);%角速度和时间变化关系
- x_erjie=(B-A)*(420*(t/T)^2-1680*(t/T)^3+2100*(t/T)^4-840*(t/T)^5);%角加速度和时间变化关系
- X=[X,x'];
- X_yijie=[X_yijie,x_yijie'];
- X_erjie=[X_erjie,x_erjie'];
- TT=[TT,t];
- end
- X=X';%矩阵转置
- X_yijie=X_yijie';
- X_erjie=X_erjie';
- TT=TT';
- fig1=figure;
- plot(TT,X(:,1));%三维绘图此处绘制x方向位移变化示意。
- grid on;
- fig2=figure;
- plot(TT,X_yijie(:,1));%三维绘图此处绘制x方向速度变化示意。
- grid on;
- fig3=figure;
- plot(TT,X_erjie(:,1));%三维绘图此处绘制x方向加速度变化示意。
- grid on;
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/菜鸟追梦旅行/article/detail/566880
推荐阅读
相关标签

