
- 1kafka生产者消费者举例_kafka生产消费的例子
- 2【EI会议征稿通知】2024年第四届电子信息工程与计算机科学国际会议(EIECS 2024)
- 3博客园地址:www.cnblogs.com/zhengbin_从应用到内核的高峰的博客园地址
- 4[渝粤教育] 中国地质大学 机械原理 复习题_单选对于转速较高的凸轮机构为了减小冲击和振动从动件运动规律最好采用()运动规律
- 5智能守护校园餐桌:校园阳光食堂视频AI监控智能管理方案
- 6Git推送本地代码到远程仓库
- 7【机器学习】机器学习与大型预训练模型的前沿探索:跨模态理解与生成的新纪元_大模型和机器学习
- 8RabbitMQ + JMeter组合,优化你的中间件处理方式!
- 9C#中多进程之间的通讯方式_c#进程间通信
- 10Docker(十八)容器与云计算_容器与云计算的关系
stm32编码器正反转计数程序_想知道PLC的定位指令的使用程序,伺服接线图?这篇文章别错过...
赞
踩
伺服控制接线图:
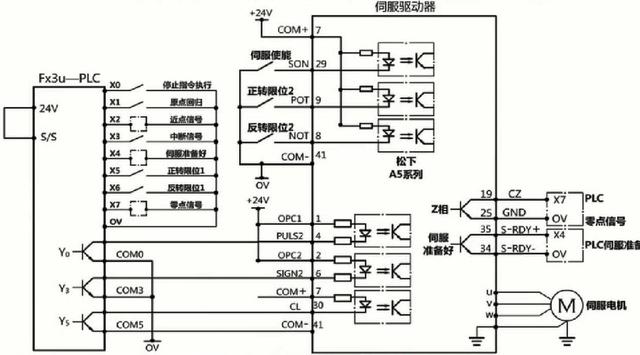
在这里我们使用的是三菱FX—3U的PLC与松下A5的伺服驱动器,我们在PLC上设计了停止指令,远点回归,近点信号,中断信号,以及正反转限位等。因为我们前面已经给大家介绍过类似这种接线图,现在就不一一介绍了。
伺服驱动器参数设置:
Pr0.01=0;位置控制方式,
Pr0.00=1;电机旋转方向设定,Pr0.05=0;光电耦合输入,(伺服驱动器有两种方式输入:一种是光电耦合输入,一种是差动输入。)
Pr0.06=0;指令脉冲极性设置,Pr0.07=3;脉冲+方向输入方式,
Pr0.08=3000;电机每转1周指令脉冲数,
Pr4.06=3847 ( 00000F07H) ;设置S17为清零输入端,
Pr4.11=131586 ( 0002020202H) ;设置S02为伺服准备好输出端,
Pr4.00=131586 ( 0002020202H) ;设置I1为反转限位2开关输入端,
Pr4.01=65793 ( 00010101H) ;设置SI2为正转限位2开关输入端。
Pr5.04=0;正反转限位开关2有效,
Pr5.05=2;正反转限位顺序设置,并清除脉冲偏差计数器为零
输入和输出信号说明:
●X0一停止 定位指令执行,
●X1-开关瞬间接通,可执行原点回归指令( DSZR)
●X2一原点回归时,近点信号输入端,
●X7一原点回归时,接收伺服驱动器输出的编码器Z相信号输入端。即零点信号。
●Y000 -脉冲输出端,
●Y003- -电机旋转方向信号输出端
●Y005- 清零信号输出端。
说明:
1,使用X001输入端启动DSZR原点回归指令
2,使用M22正转点动,执行DRVI相对定位指令。
3使用M23反转点动,执行DRVI相对定位指令。
4,使用M24正转启动,执行DRVA绝对定位指令。
5使用M25反转启动,执行DRVA绝对定位指令。
6使用M31启动,执行ZRN原点回归指令。
7使用M32启动,执行DVIT中断定长指令。
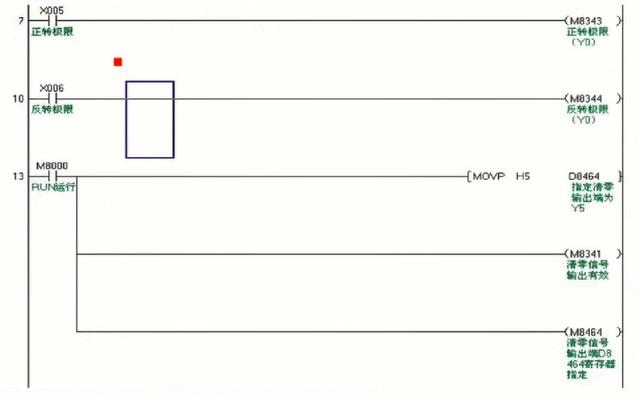
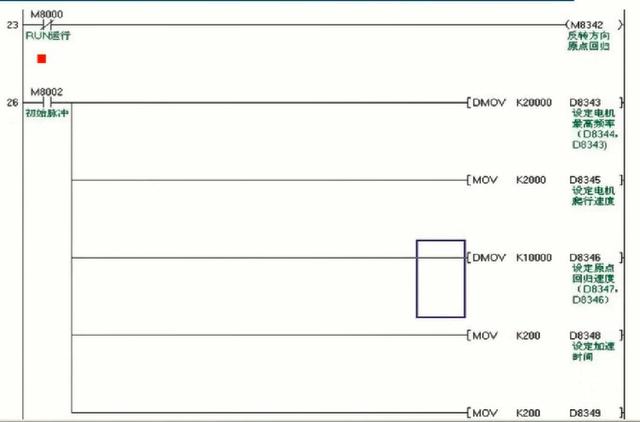
程序:
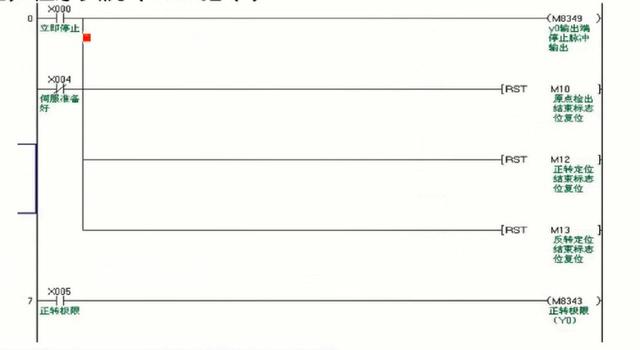
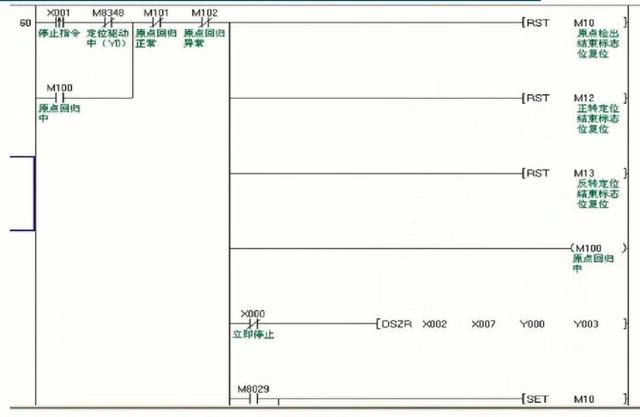
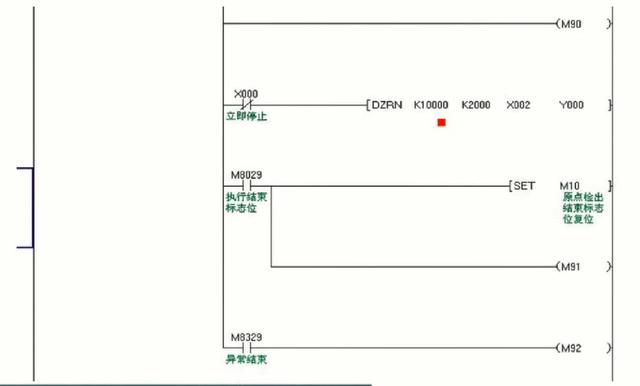
在这里如果大家有看不懂的,可以看看前面的文章,对原点回归指令的介绍。


