
热门标签
热门文章
- 1揭秘业务系统数据安全三大核心问题:“谁在用”、“用什么”和“怎么用”
- 2微软TTS最新模型,发布9种更真实的AI语音_微软ai语音库
- 3OpenWRT LEDE在Ubuntu22.04 编译输出记录_mtk-openwrt-lede-4.2.1.0
- 4数据库基本操作语句
- 5人工智能证书考试_人工智能ai证书
- 6matlab实现KNN算法---电影分类_matlab knn算法电影分类
- 7java获取当天日期(年月日、年月日时分秒)_java获取当前时间年月日时分秒
- 8vscode 前端常用插件推荐_vscode 前端必备插件
- 9京东java面试1_京东交叉面试容易挂吗
- 10[IMX6ULL驱动开发]-GPIO子系统和Pinctrl子系统_imx6ull gpio子系统
当前位置: article > 正文
FANUC机器人socket通讯硬件配置_发那科使用socket需要什么选项
作者:酷酷是懒虫 | 2024-08-02 19:21:20
赞
踩
发那科使用socket需要什么选项
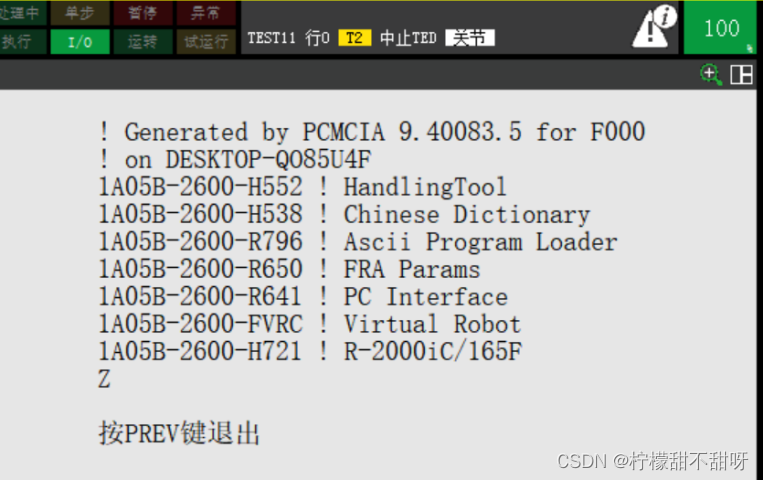
一、添加机器人选配包
Fanuc机器人要进行socket通讯,需要有机器人通讯的选配包,1A05B-2600-R648 User Socket Msg,1A05B-2600-R632 KAREL,1A05B-2600-R566 KAREL Diagnostic,1A05B-2600-J971 KAREL Use Sprt FCTN。
二、FANUC机器人通讯配置
将fanuc机器人keral变量打开,才能使用keral程序进行SOCKET通讯。

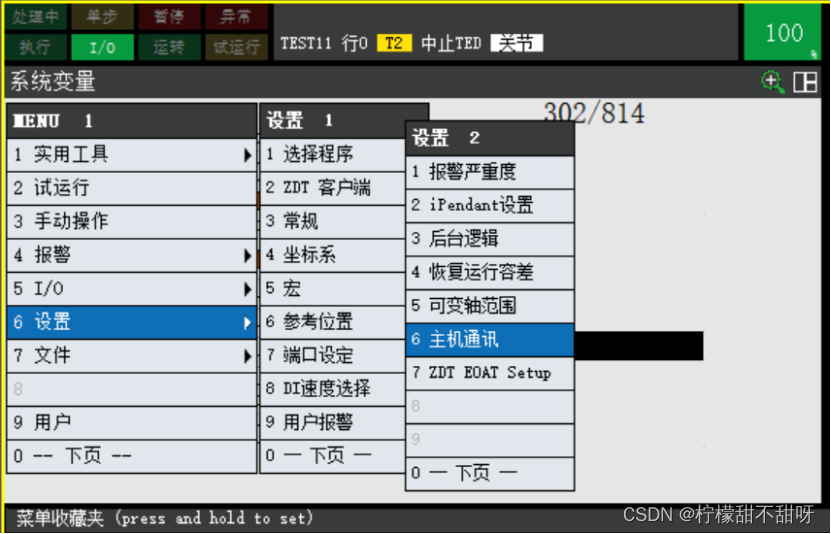
打开设置中的主机通讯选项,进行机器人的IP地址的更改。
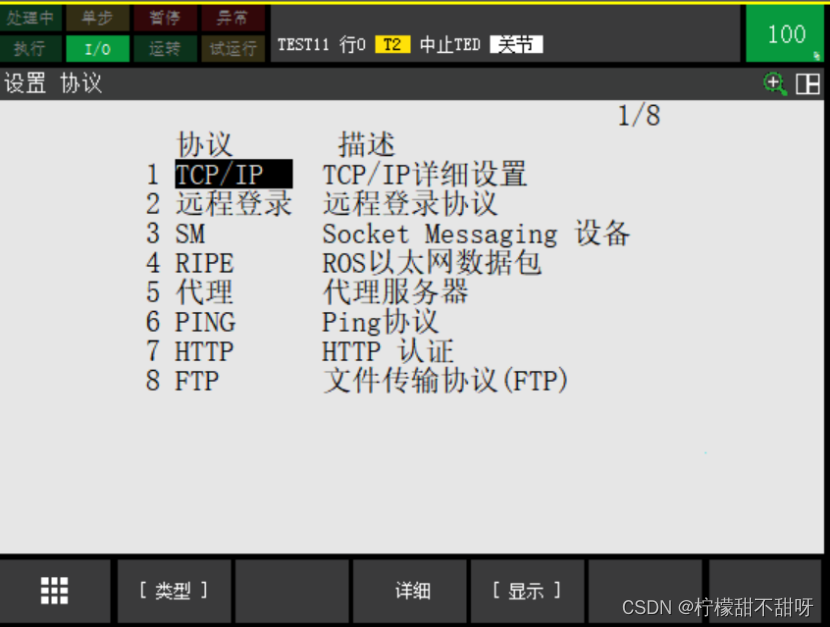
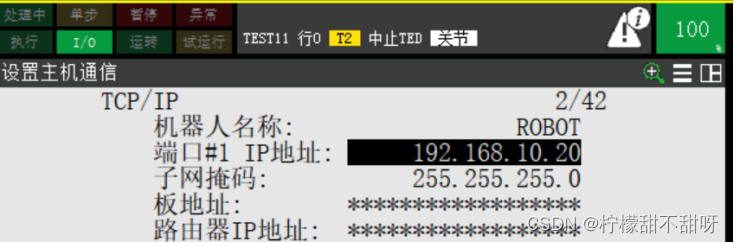
点击详情进入编辑页面。
将端口1的ip地址改成192.168.10.20。
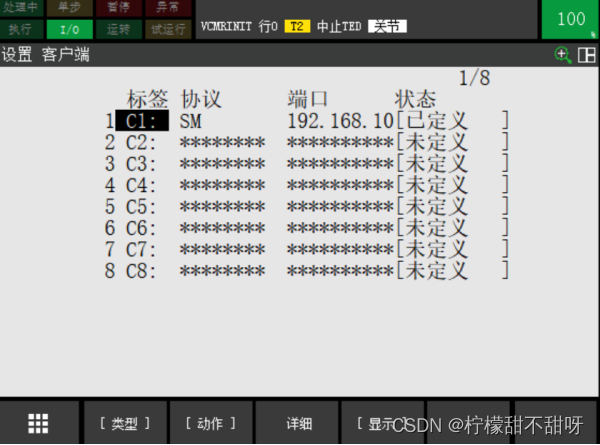
三、机器人作为客户端设置
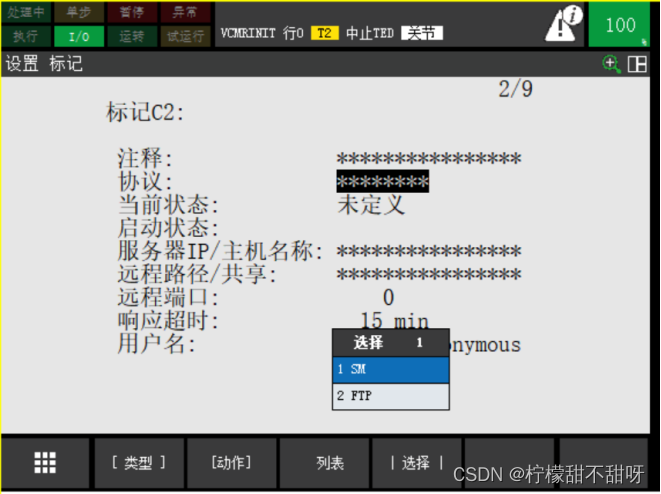
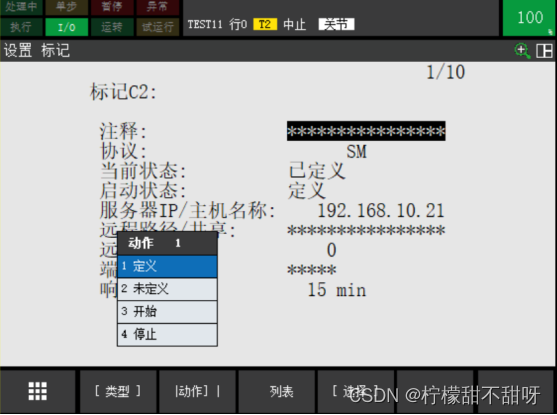
在主机通讯页面点击显示,选择其中客户端选项,对C2端口进行定义。
协议选择SM协议。
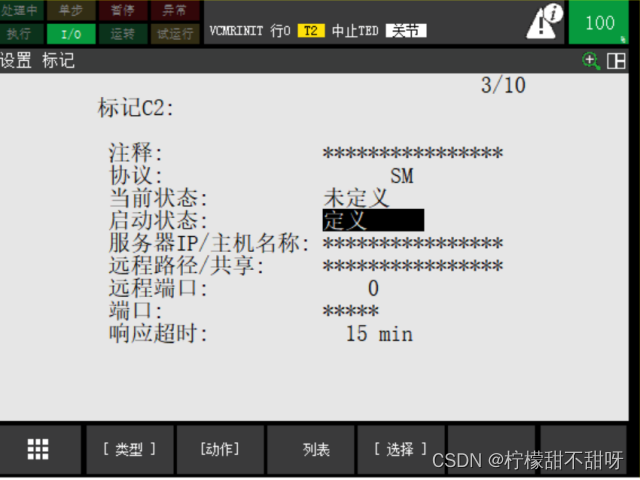
定义启动状态。
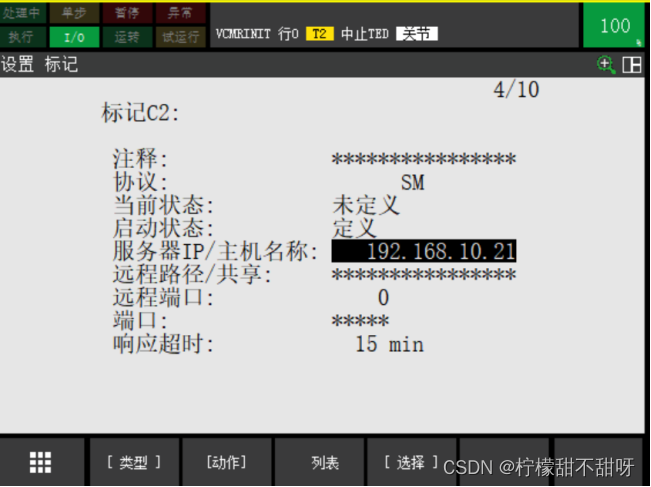
注意TCP/IP的地址与机器人IP地址不同,进行地址的分配。
对动作进行定义
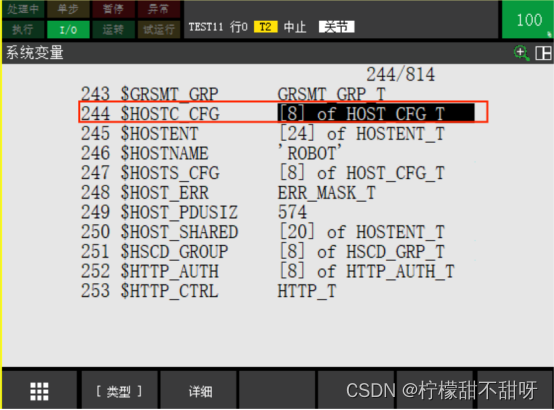
设置的端口号,在变量中找到下图所示的变量名称
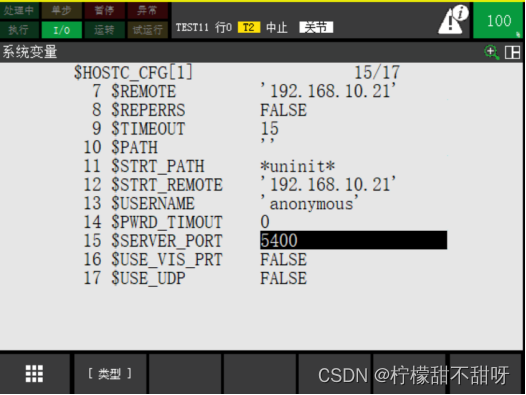
将端口号设置为5400,设置完成后续重启控制柜
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/酷酷是懒虫/article/detail/919521
推荐阅读
相关标签

