
- 1一文速学数模-预测模型(一)Logistic原理详解以及Python项目实现_logistic预测模型
- 2需求管理 | 如何有效的进行需求规划、实现、协调管理_需求管理 需求实现
- 3linux更换python版本
- 4SDRAM 与 DDR SDRAM 区别
- 5Python 爬虫项目实战(一):爬取某云热歌榜歌曲_python爬虫爬取音乐单曲
- 6定论——软件开发的方法论探讨
- 7华为OD机试真题 - 提取字符串中的最长合法简单数学表达式
- 8ubuntun安装pypbc包_ubuntu pbc打包
- 9FunAudioLLM-SenseVoice+CosyVoice-论文阅读笔记_sensevoice 时间戳
- 10探索未来区块链安全的新篇章:Mithril - 卡尔达诺的阈值多签名协议
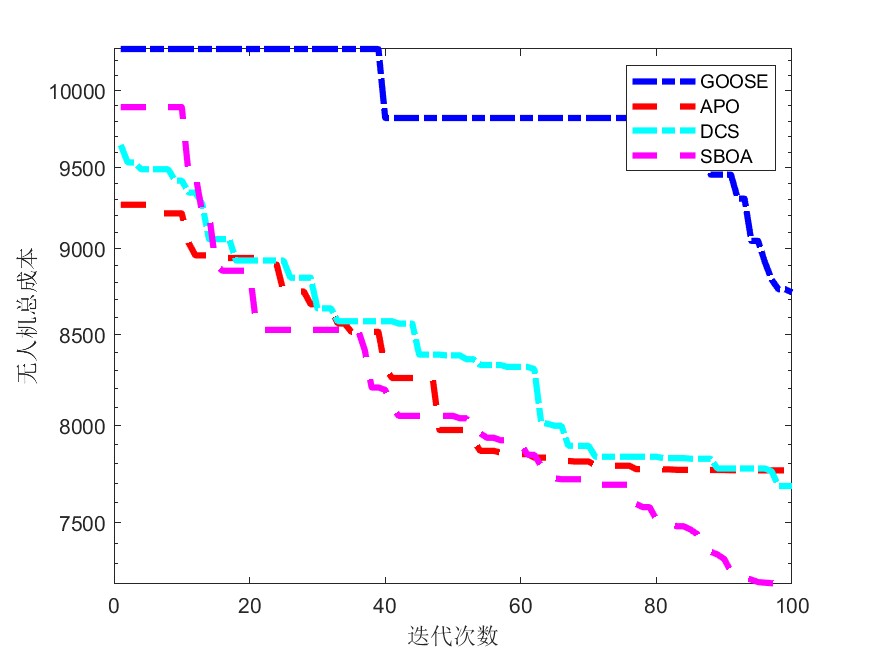
无人机集群路径规划:四种优化算法(GOOSE、APO、DCS、SBOA)求解无人机集群路径规划,提供MATLAB代码
赞
踩
一、单个无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、无人机集群模型介绍
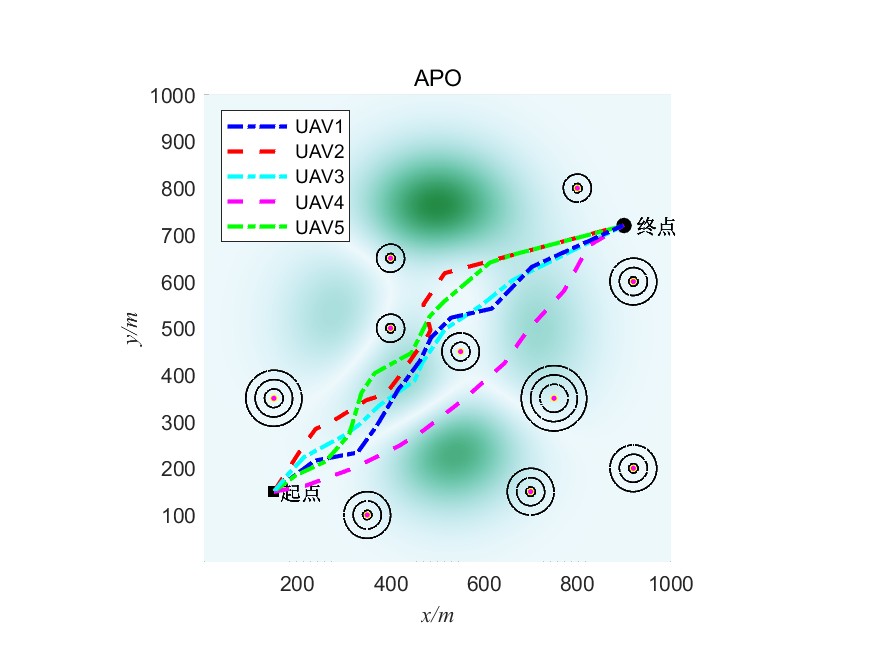
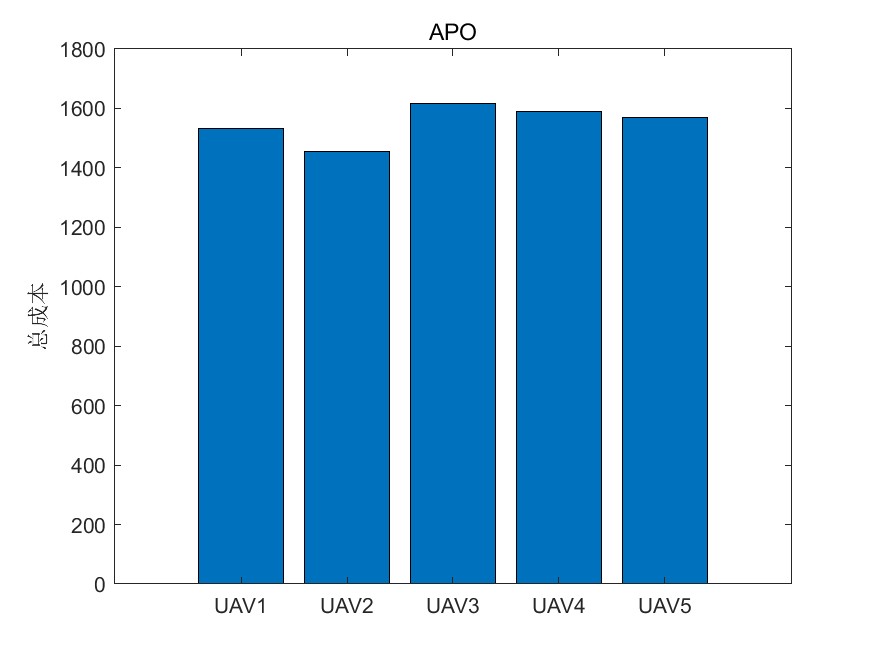
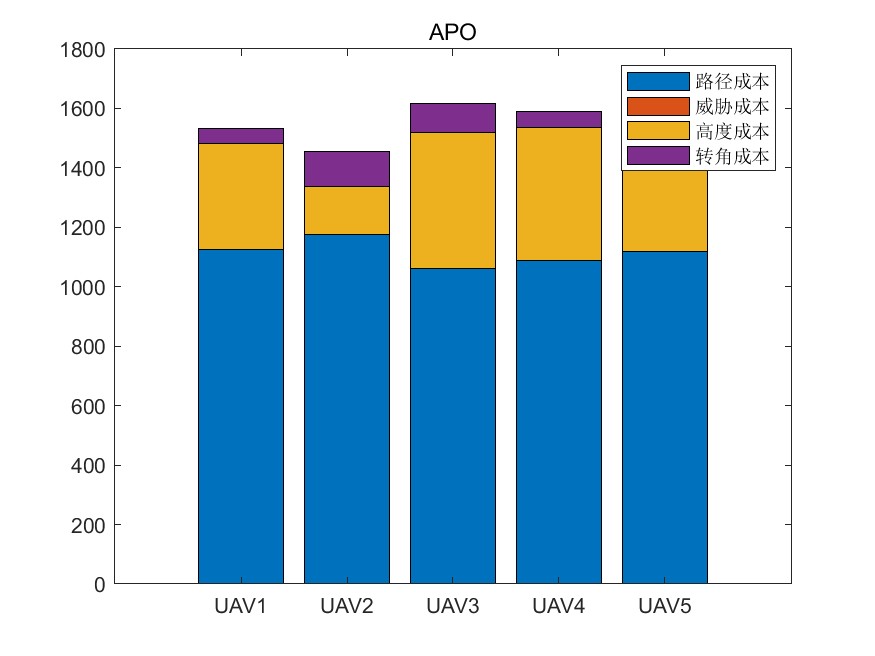
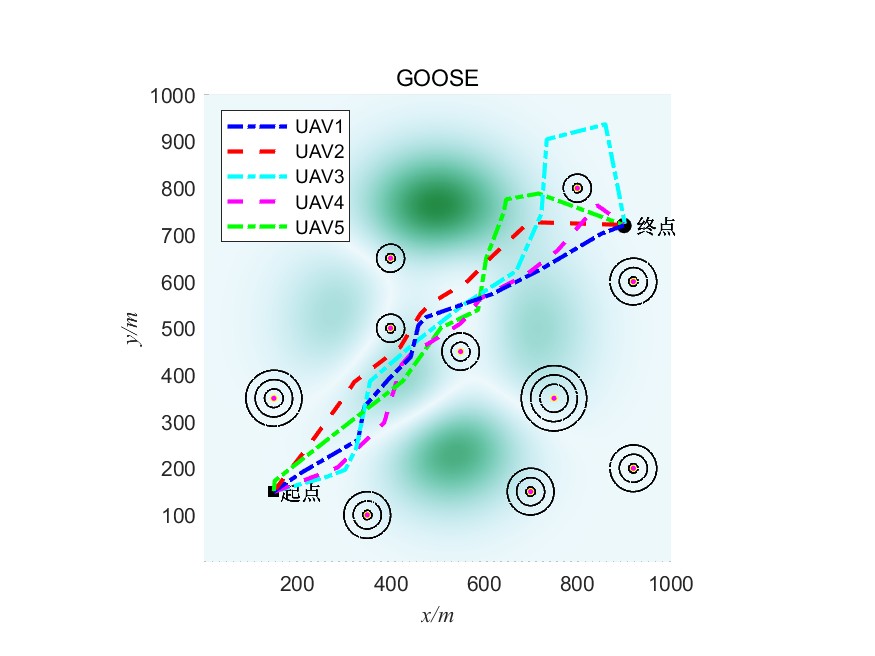
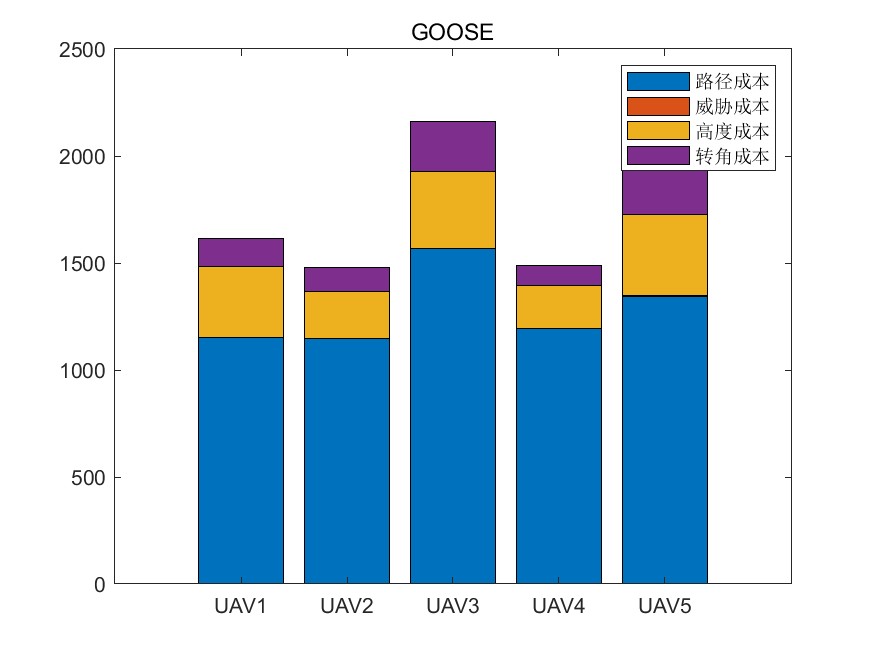
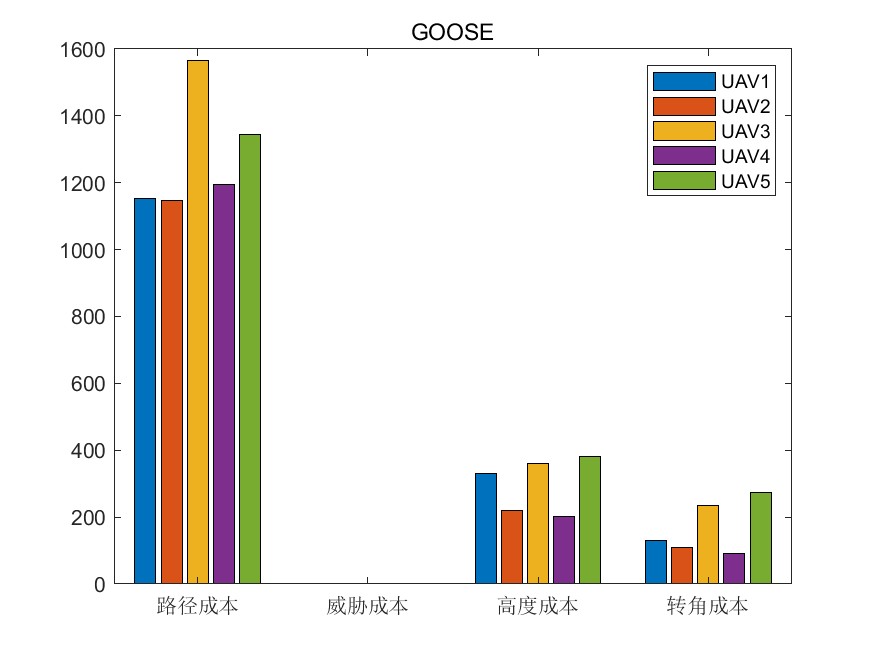
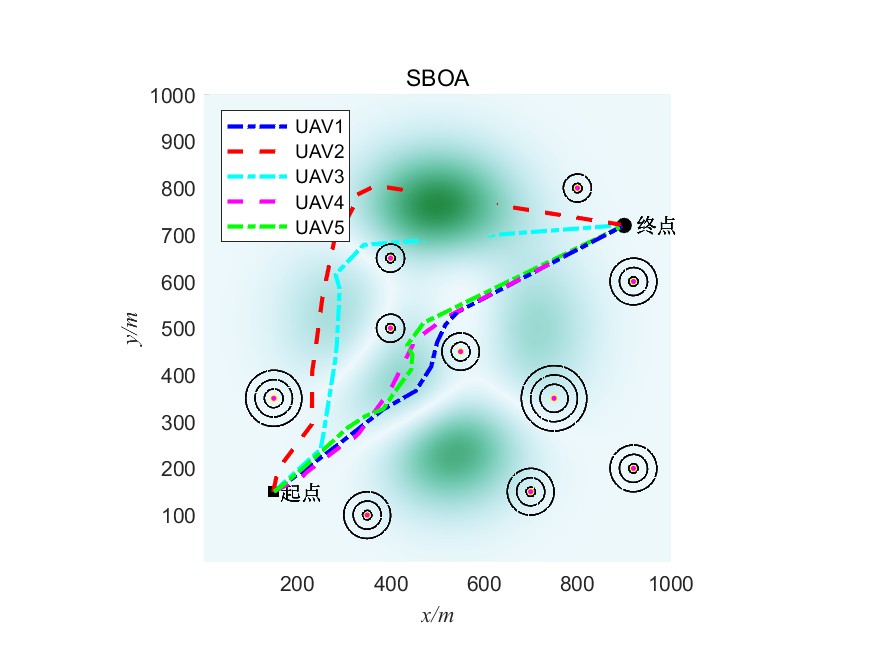
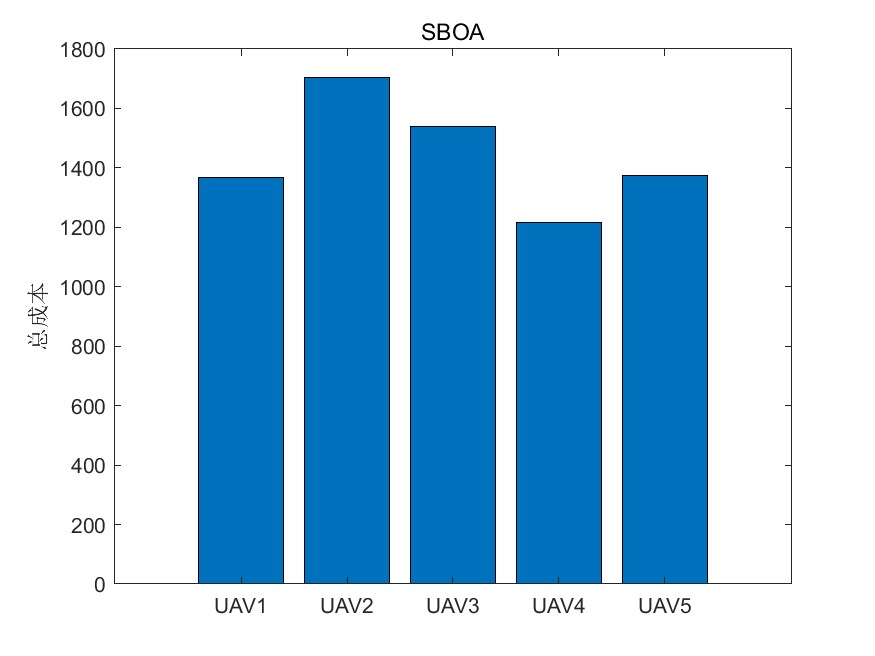
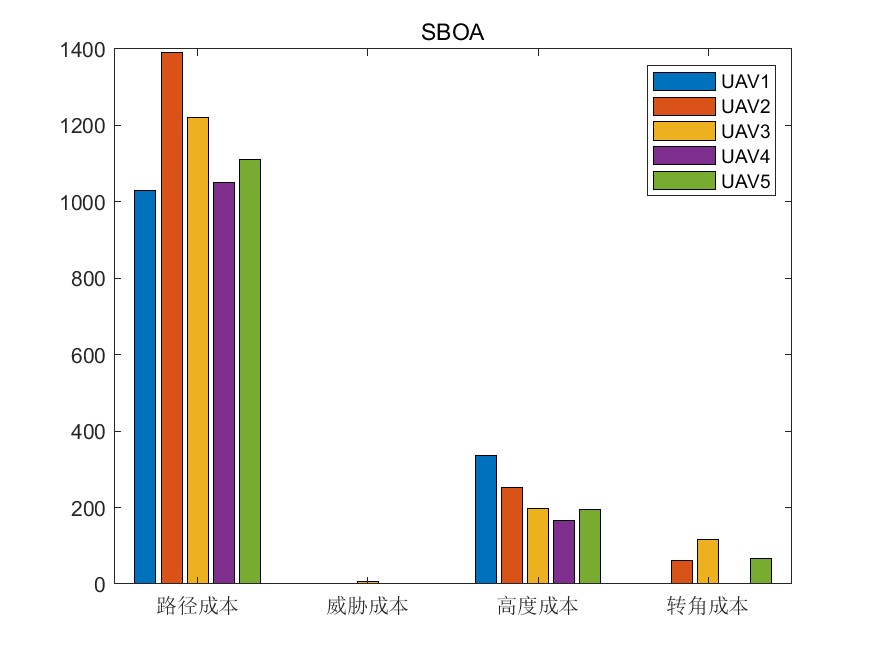
本文中以5个无人机构成无人机集群,采用优化算法同时规划五个无人机的路径,每个无人机的成本由路径成本、威胁成本、高度成本和转角成本四个部分构成。无人机集群的总成本为5个无人机成本之和。
三、四种算法求解无人机集群路径规划
3.1四种算法介绍
3.1.1鹅优化算法
鹅优化算法(GOOSE Algorithm,GOOSE)是2024年提出的一种智能优化算法,该算法从鹅的休息和觅食行为获得灵感,当鹅听到任何奇怪的声音或动作时,它们会发出响亮的声音来唤醒群中的个体,并保证它们的安全。
参考文献
[1]Hamad R K, Rashid T A. GOOSE algorithm: a powerful optimization tool for real-world engineering challenges and beyond[J]. Evolving Systems, 2024: 1-26.
原文链接:https://blog.csdn.net/weixin_46204734/article/details/139967699
3.1.2北极海鹦优化算法
北极海鹦优化(Arctic puffin optimization,APO)算法是2024年提出一种智能优化算法。该算法模拟海鹦在空中飞行和水下觅食两个阶段的行为,旨在实现勘探与开发之间更好的平衡。该算法包括几个关键操作,包括空中飞行阶段的空中搜索和俯冲捕食,以及水下觅食阶段的采集觅食、强化搜索和捕食者规避。通过这些步骤,该算法旨在有目的地探索搜索空间,在探索和利用之间取得更好的平衡,从而避免陷入局部最优。APO包括空中飞行(探索)和水下觅食(开发)阶段。在探索阶段,引入Levy飞行和速度因子机制,增强算法跳出局部最优值的能力,提高收敛速度。在开发阶段,采用协同效应和自适应变化因子等策略,确保算法能够有效利用当前最佳解,指导搜索方向。此外,通过行为转换因子实现勘探和开发阶段之间的动态过渡,有效平衡了全球搜索和局部开发。
参考文献:
[1]Wen-chuan Wang, Wei-can Tian, Dong-mei Xu, Hong-fei Zang. Arctic Puffin Optimization: A Bio-inspired metaheuristic Algorithm for Solving Engineering Design Optimization. Advances in Engineering Software, 2024,195, 103694. Redirecting
原文链接:https://blog.csdn.net/weixin_46204734/article/details/139967346
3.1.3差异化创意搜索算法
差异化创意搜索(Differentiated Creative Search ,DCS)算法由Poomin Duankhan 等人于2024年提出,DCS将独特的知识获取过程与创造性的现实主义范式相结合,通过采用双重策略方法,提高算法效率。
参考文献:
[1]Duankhan P, Sunat K, Chiewchanwattana S, et al. The Differentiated Creative search (DCS): Leveraging Differentiated knowledge-acquisition and Creative realism to address complex optimization problems[J]. Expert Systems with Applications, 2024: 123734. Redirecting
原文链接:https://blog.csdn.net/weixin_46204734/article/details/139453487
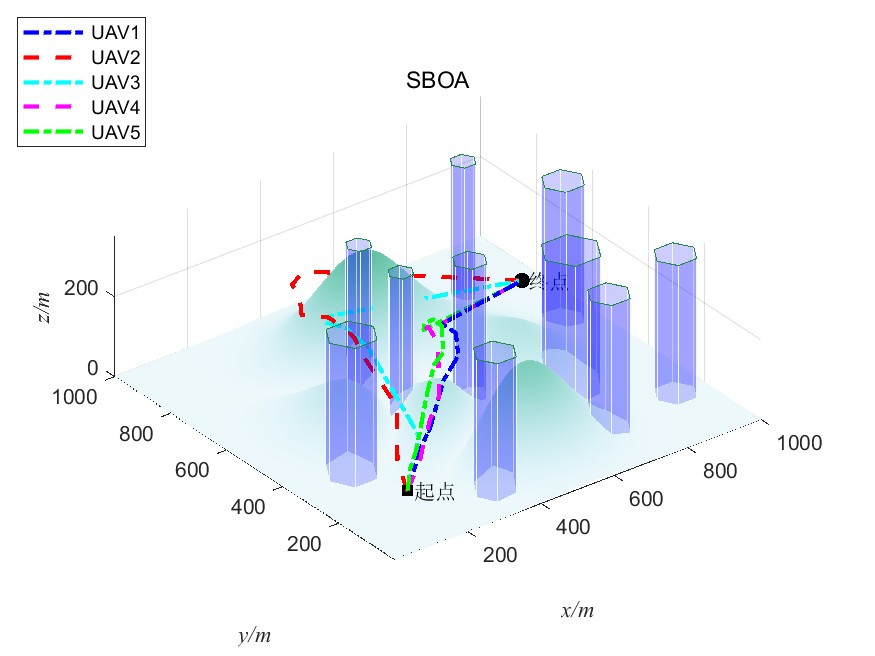
3.1.4蛇鹫优化算法
蛇鹫优化算法(Secretary bird optimization algorithm,SBOA)由 Fu Youfa等人于2024年提出,该算法的灵感来自于蛇鹫在自然环境中的生存行为。
参考文献:
[1]Fu Y, Liu D, Chen J, et al. Secretary bird optimization algorithm: a new metaheuristic for solving global optimization problems[J]. Artificial Intelligence Review, 2024, 57(5): 1-102.
原文链接:https://blog.csdn.net/weixin_46204734/article/details/139453663
3.2部分代码
- close all
- clear
- clc
- dbstop if all error
- global model
- model = CreateModel(); % 创建模型
- F='F1';
- [Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
- pop=50;%种群大小(可以自己修改)
- maxgen=100;%最大迭代次数(可以自己修改)
- for i=1:length(algorithName)
- Algorithm=str2func(algorithName{i});
- [fMin,bestX,ConvergenceCurve] = Algorithm(pop, maxgen,Xmin,Xmax,dim,fobj);
- result(i).fMin=fMin;
- result(i).bestX=bestX;
- result(i).ConvergenceCurve=ConvergenceCurve;
- result(i).BestPosition=BestPosition;
- result(i).BestFit=BestFit;
- result(i).UAVfit=UAVfit;
- end
- save result result
3.3部分结果


















四、完整MATLAB代码
见下方名片

