
- 1POSTMAN从入门到精通系列(二十七):使用GraphQL_postman graphql
- 2python turtle 乌龟赛跑_Python编程 | 海龟绘图:Turtle Race 海龟赛跑游戏
- 3用Qt编写实现导航栏按钮_qt编写主界面导航栏
- 4GPT实战系列-ChatGLM2模型的微调训练参数解读_chatglm2模型数据 nlp
- 5Unity3D教程:动画合成教程(Animation Blending)_untiy animation合并
- 6[D3D_XD项目]D3DMesh类_d3dxloadmeshfromx模型平移
- 7微软拼音中设置小鹤双拼_微软拼音 小鹤
- 8Unity关于图形学基础知识-矩阵的逆(七)_unity shader 逆矩阵 如何计算
- 9如何修改Unity3D UGUI 默认 shader 实现自定义 UI 表现_unity shader,怎么加入到默认列表
- 10Python爬虫三:抓取链家已成交二手房信息(58W数据)_爬取链家网二手房数据
S32K148----SDK笔记----CAN收发_flexcan_drv_configrxmb
赞
踩
前言
S32K148自带3路CAN, 官方的SDK给了can_pal的例程, 本文更基础一点, 直接用flexcan组件相关的函数, CANFD需要相应的电平转换芯片速率上的支持, 我暂时用不到CANFD, 就只拿来做基础的CAN通信. 先测试CAN发送, 然后测试CAN的接收中断. 板子某宝淘的, 连接两路CAN到CAN分析仪:

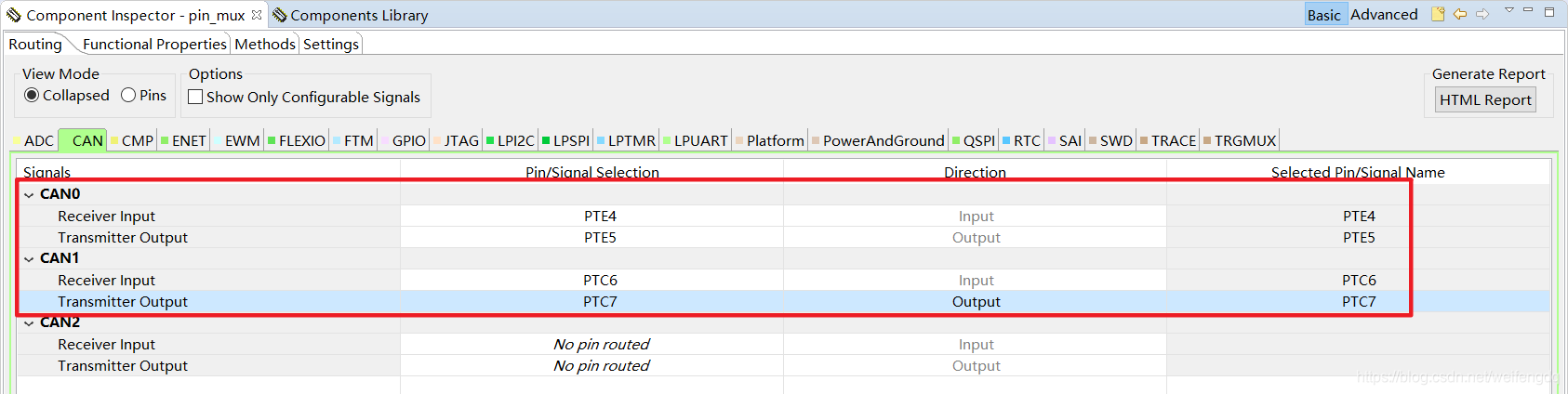
左边是S32K148引出的两路CAN, 右边是CAN分析仪. 记得至少一边接120Ω终端电阻. CAN0和CAN1对应的引脚为:
| CAN0_RX | PTE4 |
|---|---|
| CAN0_TX | PTE5 |
| CAN1_RX | PTC6 |
| CAN1_TX | PTC7 |
本文中CAN0设置为250K, CAN1设置为500K.
建立工程
步骤:
- File -> New -> S32DS Application Project
- Processors 选择 S32K148, Project Name 填你自己的工程名
- Select SDK: SDKs 选择 S32K148_SDK 3.0.0, Debugger选择J-Link, Finish.
ProcessorExpert配置
双击工程名, 点击Components窗口Components目录下的 pin_mux:PinSetting, CAN配置:
Component Library中双击添加两组flexcan组件:
CAN0组件配置如下图, Device选CAN0, 设置250kbit/s, 不使能FD:
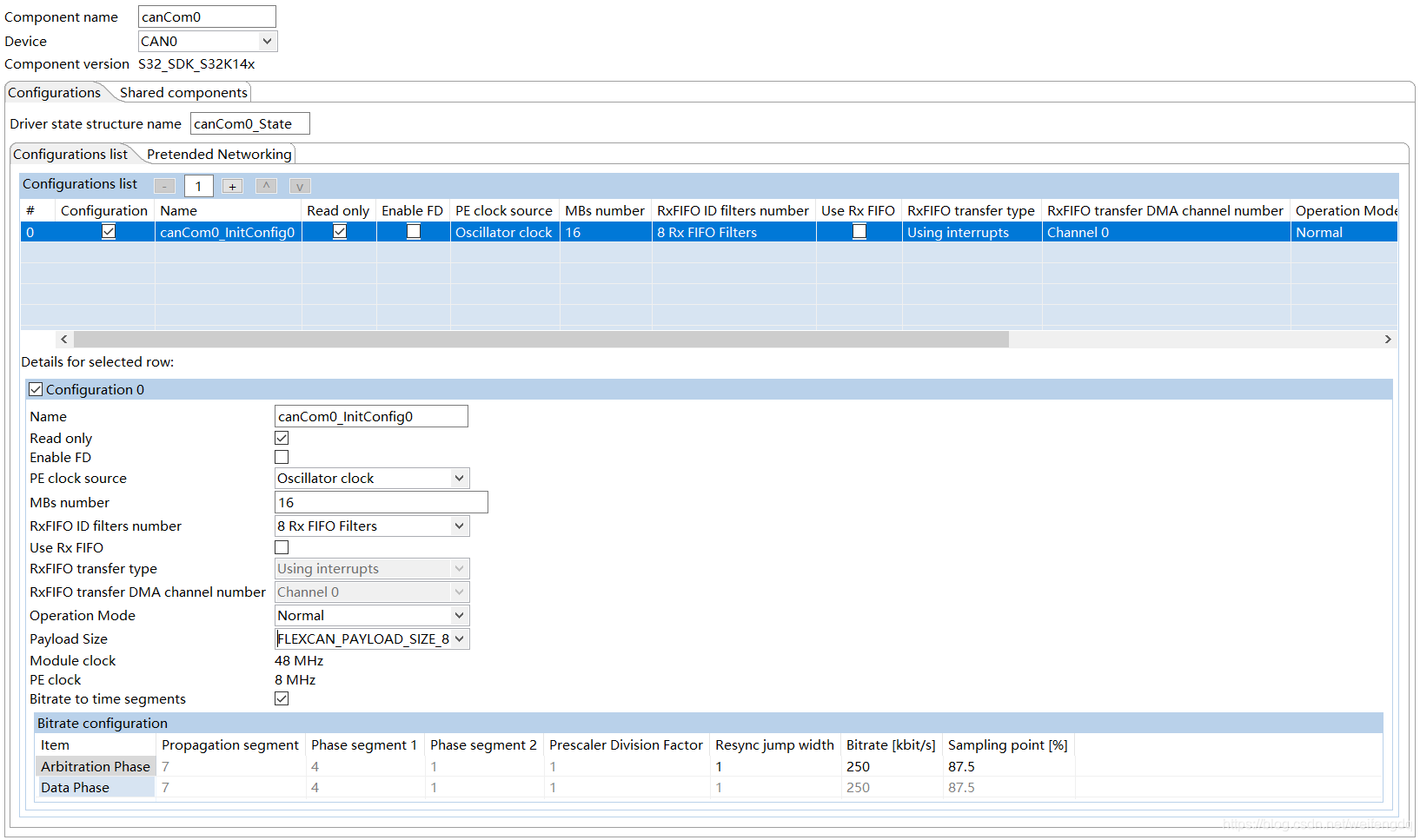
CAN1组件配置如下图, 设置500kbit/s:

点击生成代码:

发送CAN报文
先是日常一贴的时钟和引脚配置:
/* For example: for(;;) { } */
CLOCK_SYS_Init(g_clockManConfigsArr, CLOCK_MANAGER_CONFIG_CNT,
g_clockManCallbacksArr, CLOCK_MANAGER_CALLBACK_CNT);
CLOCK_SYS_UpdateConfiguration(0U, CLOCK_MANAGER_POLICY_FORCIBLE);
PINS_DRV_Init(NUM_OF_CONFIGURED_PINS, g_pin_mux_InitConfigArr);
- 1
- 2
- 3
- 4
- 5
然后是CAN组件的初始化:
FLEXCAN_DRV_Init(INST_CANCOM0, &canCom0_State, &canCom0_InitConfig0);
FLEXCAN_DRV_Init(INST_CANCOM1, &canCom1_State, &canCom1_InitConfig0);
- 1
- 2
然后就可以发CAN报文了:
#define TX_MAILBOX_0 10 #define TX_MAILBOX_1 11 #define TIMEOUT 10U flexcan_data_info_t data_std_info = { .msg_id_type = FLEXCAN_MSG_ID_STD, .data_length = 8U, .is_remote = false }; flexcan_data_info_t data_ext_info = { .msg_id_type = FLEXCAN_MSG_ID_EXT, .data_length = 8U, .is_remote = false }; uint32_t msg_id0 = 0x123; uint8_t data0[8] = {1, 2, 3, 4, 5, 6, 7, 0xFF}; uint32_t msg_id1 = 0x1234567; uint8_t data1[8] = {7, 6, 5, 4, 3, 2, 1, 0xFE}; //============================================== while(1) { ++data0[7]; ++data1[7]; FLEXCAN_DRV_SendBlocking(INST_CANCOM0, TX_MAILBOX_0 , &data_std_info , msg_id0, data0, TIMEOUT); FLEXCAN_DRV_SendBlocking(INST_CANCOM1, TX_MAILBOX_1 , &data_ext_info , msg_id1, data1, TIMEOUT); OSIF_TimeDelay(1); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
调试运行, 可以看到CAN分析仪的上位机里面接收到了数据, 这里以500K CAN1接收的扩展帧为例:

可以看到上图中增量时间里面是1.8ms, 而我们程序里只有1ms的延时 OSIF_TimeDelay(1);, 是因为Blocking占用了时间, 我们不用Block的方式, 直接Send:
while(1) {
++data0[7];
++data1[7];
FLEXCAN_DRV_Send(INST_CANCOM0, TX_MAILBOX_0 , &data_std_info , msg_id0, data0);
FLEXCAN_DRV_Send(INST_CANCOM1, TX_MAILBOX_1 , &data_ext_info , msg_id1, data1);
OSIF_TimeDelay(1);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
这个是没有TIMEOUT参数的, 调试运行, 可以看到增量时间是正常的1ms, 大概是甩给DMA了吧, 要注意Blocking方式可以返回成功失败, 非Blocking返回的应该都是成功???:

具体是Blocking还是非阻塞, 看对结果看重还是对时间要求严格, 前者失败了可以设定重传以及最大重传次数, 在有一定CAN负载率时有一定的必要, 后者自信当甩手掌柜单发单收时用起来很爽.
CAN接收中断
步骤:
FLEXCAN_DRV_ConfigRxMb配置接收缓存(message buffer)FLEXCAN_DRV_InstallEventCallback添加中断FLEXCAN_DRV_Receive开始接收(有一种FIFO的接收方式, 这里暂时未用)- 然后我们补全接收中断函数
typedef void (*flexcan_callback_t)(uint8_t instance, flexcan_event_type_t eventType, uint32_t buffIdx, flexcan_state_t *flexcanState);在接收中断里, 判断完成和端口, 然后把CAN0接收到ID为0x87的标准帧报文转发给CAN1; 把CAN1接收到ID为0x1234568的扩展帧报文转发给CAN0.
#define RX_MAILBOX_0 0U #define RX_MAILBOX_1 1U flexcan_msgbuff_t recvMsg0; flexcan_msgbuff_t recvMsg1; void canRxCallback(uint8_t instance, flexcan_event_type_t eventType, uint32_t buffIdx, flexcan_state_t *flexcanState) { if(eventType == FLEXCAN_EVENT_RX_COMPLETE) { if(instance == INST_CANCOM0) { FLEXCAN_DRV_Receive(INST_CANCOM0, RX_MAILBOX_0, &recvMsg0); FLEXCAN_DRV_Send(INST_CANCOM1, TX_MAILBOX_1, &data_std_info, recvMsg0.msgId, recvMsg0.data); } else if(instance == INST_CANCOM1) { FLEXCAN_DRV_Receive(INST_CANCOM1, RX_MAILBOX_1, &recvMsg1); FLEXCAN_DRV_Send(INST_CANCOM0, TX_MAILBOX_0, &data_ext_info, recvMsg1.msgId, recvMsg1.data); } } } //main FLEXCAN_DRV_ConfigRxMb(INST_CANCOM0, RX_MAILBOX_0, &data_std_info, 0x87); FLEXCAN_DRV_InstallEventCallback(INST_CANCOM0, canRxCallback, NULL); FLEXCAN_DRV_ConfigRxMb(INST_CANCOM1, RX_MAILBOX_1, &data_ext_info, 0x1234568); FLEXCAN_DRV_InstallEventCallback(INST_CANCOM1, canRxCallback, NULL); FLEXCAN_DRV_Receive(INST_CANCOM0, RX_MAILBOX_0, &recvMsg0); FLEXCAN_DRV_Receive(INST_CANCOM1, RX_MAILBOX_1, &recvMsg1); while(1) { }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
调试运行, 在CAN分析仪上位机里面可以看到CAN0发送的ID为0x87的报文可以在CAN1中收到:

至于增量时间不是10ms, 待排查. 同样CAN1发送ID为0x1234568的报文也可以在CAN1中收到.
工程代码
https://download.csdn.net/download/weifengdq/11916783
微信公众号
欢迎扫描关注我的微信公众号, 及时获取最新文章:


