- 1pycharm创建Django项目_pycharm 新的django项目
- 2ChatGPT写21个程序,16个有漏洞:离取代程序员还远着呢!_人工智能编程效率低,但质量高
- 3大模型时代下的决策范式转变_大模型的统计分析和辅助决策
- 4python函数定义和调用_python函数的定义如下: #定义函数 def fun(a, b, c): print(a, b,
- 5图的深度优先遍历与广度优先遍历以及最小生成树
- 6大一python填空题必考题库,大一pta填空题python答案
- 7GitHub 上都有哪些值得关注学习的 iOS 开源项目?_afnetworking和mantle封装网络解析
- 8尚硅谷大数据技术NiFi教程-笔记02【NiFi(使用案例,同步文件、离线同步mysql数据到hdfs、实时监控kafka数据到hdfs)】_nifi使用除法
- 9闲话电子设计之100条
- 10论文笔记--Deep Residual Learning for Image Recognition(ResNet)_deep residual learning for image recognition笔记
三维重建(5)--双目立体视觉_双目重建3d
赞
踩
目录
一、平行视图
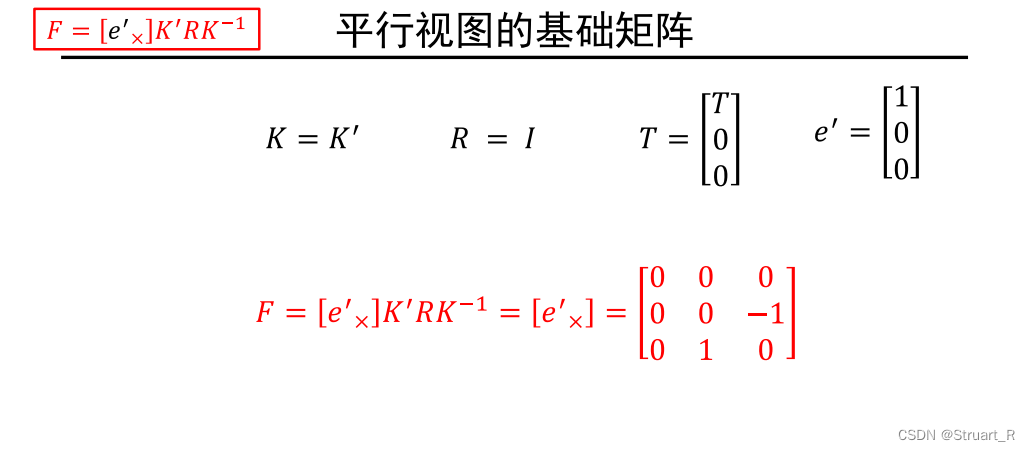
1、平行视图基础矩阵
由于基础矩阵,在平行视图情况下,极点交于无穷远处,所以我们可以假定极点
,平行视图下,
,
,那么对于平行视图有:
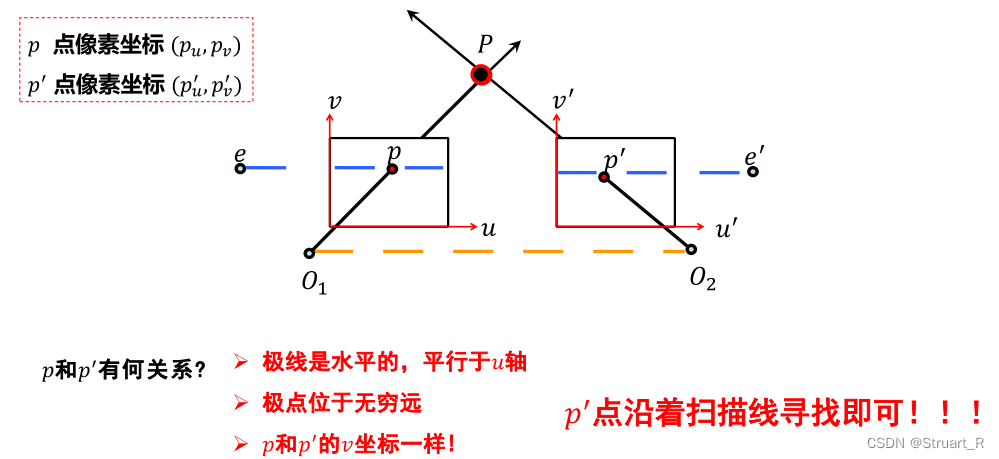
2、平行视图极几何
(1)极线是水平的,平行于u轴。平行视图肯定只在u轴方向有所变换,可以不用证明,数学证明用一般情况下基础矩阵的性质。
(2)平行视图下,p和p'在v轴方向坐标相同,即垂直方向没有变换。
(3)极点位于无穷远处
(4)已知p和F的情况下,p'只需要按着扫描线寻找即可,扫描线指的是过p且平行于u轴的线。
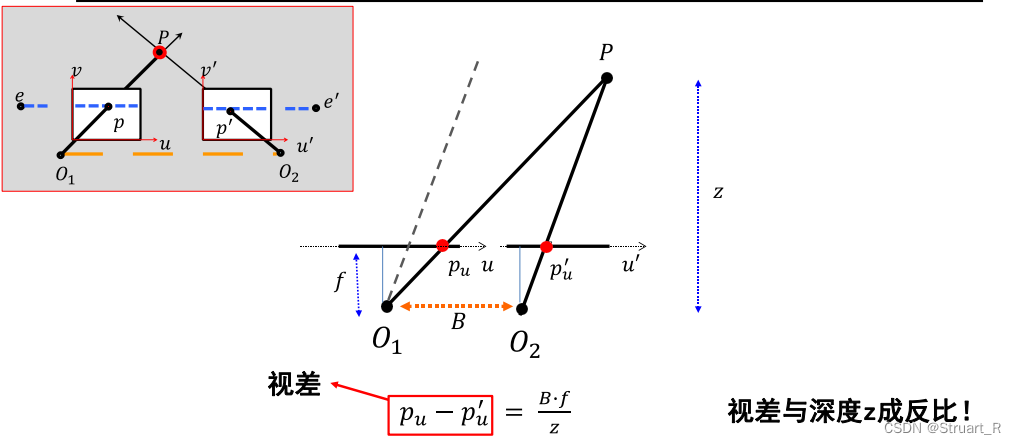
3、三角测量
一般来说,平行视图构建时,两个摄像机的各项参数基本一致,焦距也一致。如果已知两个像的视差(即两个像在u轴方向的距离),已知焦距f,已知两个摄像机在u轴方向的距离B,那么我们可以通过相似关系推导出深度z,视差与深度z成反比:
4、平行视图应用
(1)视差图/深度图
平行视图中的视差图,根据两台平行摄像机在不同角度观察同一物体或场景时,由于视角差异造成图像的差异进而推断出物体的深度和距离,得到一副深度信息图,可以用于对物体或场景的三维重建和识别。

(2)3D电影的应用
3D电影通过用两个摄像头同时模拟拍摄同一场景,模拟人眼双眼视觉,再将两个平行视图分别投影到屏幕上,由于使用特殊的偏振式眼睛,通过人眼的立体视觉原理,会给观众感知到一种立体的深度效果。

二、图像校正
图像校正:使一组非平行视图通过校正构建成平行视图。
图像校正步骤:
(1)在两幅图像l和l'找到一组匹配点,不少于8个。
(2)计算基础矩阵F(八点法),求解两幅图像中的极点e和e'。
求解e和e',利用基础矩阵性质可以列出求解多个
,由于所有极线都过极点
可以列出一个齐次线性方程组,解出e的值,同理也可以解出e'。
(3)选择透视变换H'将e'映射到无穷远点(f,0,0),也就是对H'进行变换,变换公式:
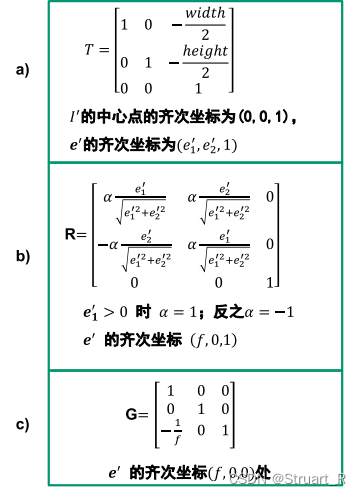
(4)对透视变换矩阵H进行变换,使得经过H和H'变换后的两个像平面满足平行视图要求,在第(3)步中H'已经达到平行视图性质,由于平行视图上两个像平面的点应该满足,即u轴方向偏移相同,那么我们可以做反运算,对于多组点i情况下满足
下,求解H。
(5) 分别利用新的矩阵H和H',对左右两幅图像l和l'进行重采样,得到一组平行视图。

三、对应点搜索
对应点搜索问题,即根据p点寻找对应p'点的问题,我们根据平行视图极几何关系可知,p'点一定在扫描线上,这样进一步缩小的检索范围。
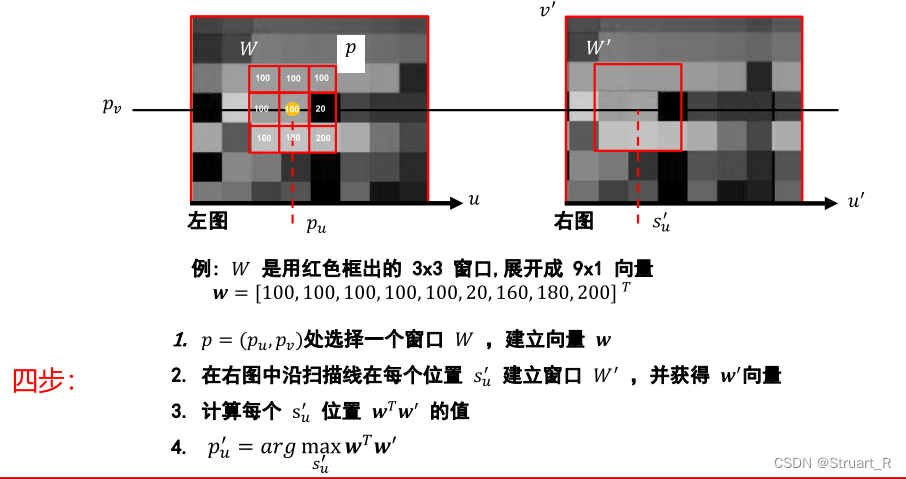
1、相关匹配法
相关匹配法通过基于一些相似性度量方法,计算区域之间的相似程度,来确定对应点位置。
在这里我们介绍一种相关匹配方法,通过点与点之间3*3窗口的相关性来进行判断,注意该方法取对应点组3*3窗口做了flatten之后的点乘均值最大化,作为相关性标准,该方法可行依据在于,一般情况下一个图像上像素颜色或灰度的变化是平滑的,这样近似相同点平方的最大值的和,理论上大于高偏差点平方的最大值的和。
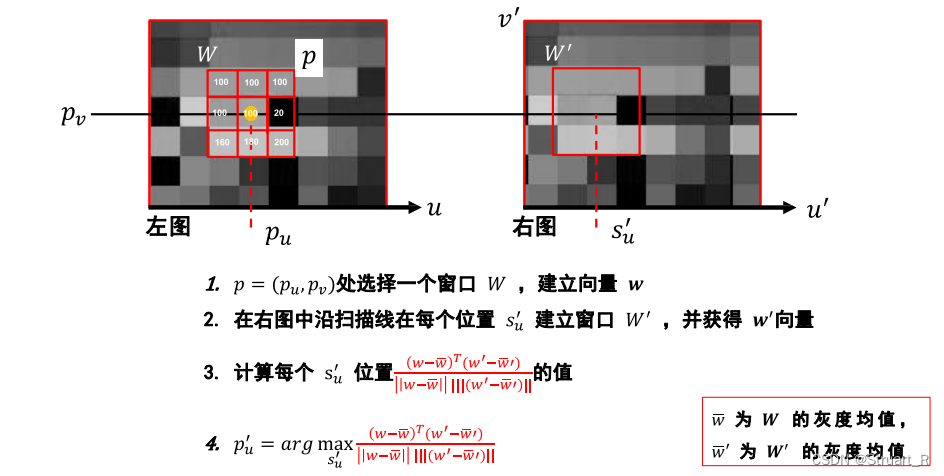
2、归一化相关匹配法
对于一个图像上存在像素颜色或灰度变化突变的情况,上一种方法会出现计算误差较大,所以进行归一化。
归一化相关匹配法:改变原来的相似性度量,通过每个窗口向窗口均值进行归一化,达到平滑的效果。
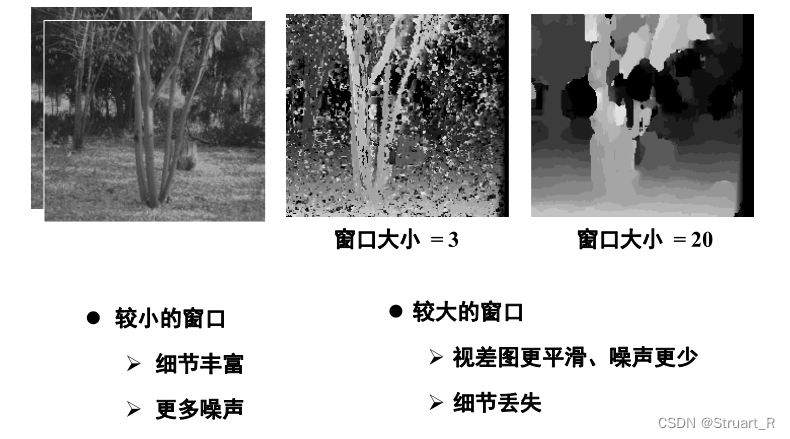
3、窗口问题
对于较小的窗口:会引入更多的噪声,更容易受到噪声影响,但反之也会在没有噪声影响的地方提供更精确的信息。
对于较大的窗口:通过归一化操作可以平滑更多的噪声,但也会丢失一部分细节。
4、相关法存在的问题
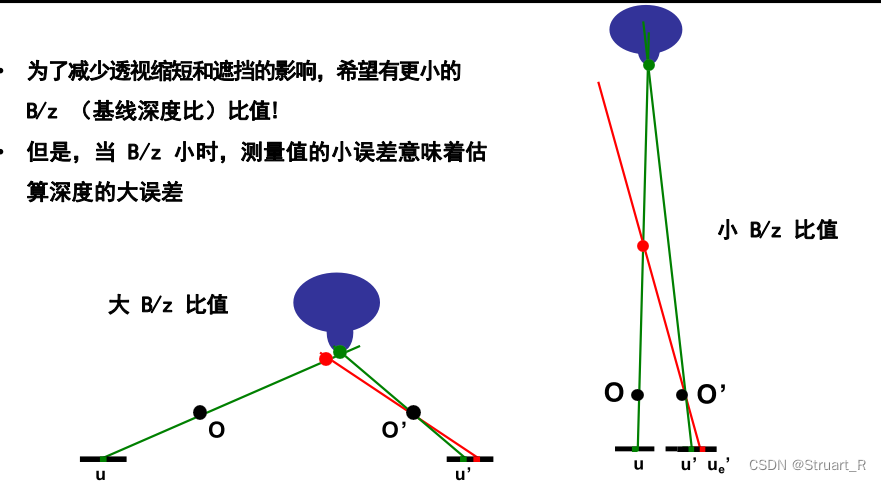
(1)透视缩短和遮挡
当遇到不规则物体在视角上存在遮挡时,可能由于B/z的过大,两个像平面无法得到更多的信息交互,导致信息丢失,所以可以适当减小B/z。
当B/z过小时,由于双目视觉上,遮挡的信息只能尽量的去弱化,不能去消除,所以当B/z过小时,物体的突出部会造成过大的深度误差,从而在三维重建过程中存在视觉上的明显错误。
所以一般控制B/z保证减弱遮挡存在的影响的同时,保证不能过小。
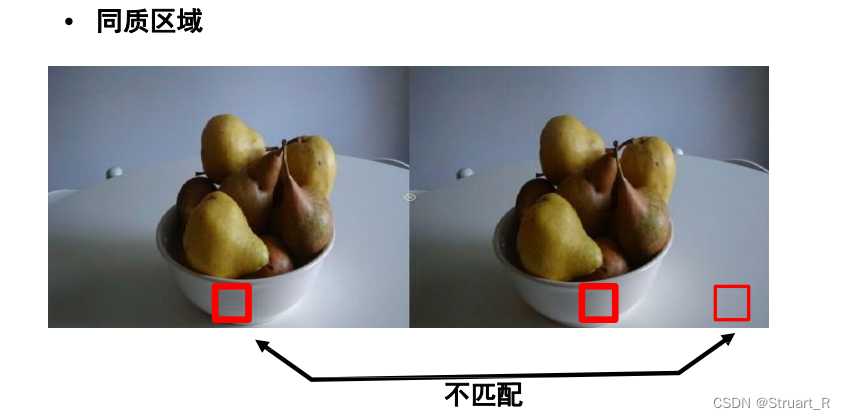
(2)同质区域
由于存在世界坐标下不同区域但颜色相近的地方,会导致误差的产生,比如用双目视觉去测量一堵白墙的形状,但光影极其不明显。
(3) 重复模式
对于世界实物上存在重复的区域,这会对双目视觉的三维重建产生较大影响。

5、约束问题
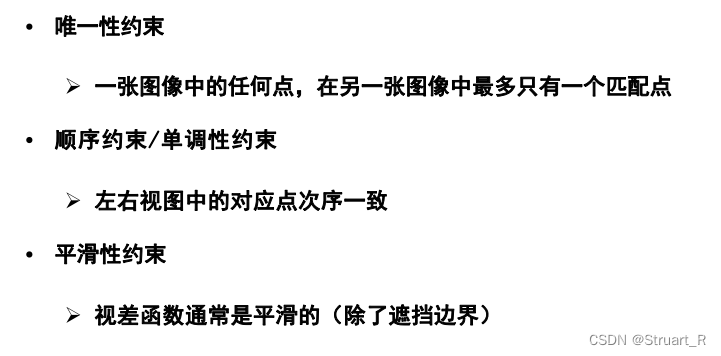
(1)唯一性约束
对于一张图像中的任何点,在另一张图像上最多只有一个匹配点,不存在同质区域和重复区域。
(2)顺序约束/单调性约束
左右视图中的对应点次序一致,保证不存在遮挡,但这个只能减少不能消除。
(3)平滑性约束
视差函数通常是平滑的,减少曝光亮度突变的问题