
热门标签
热门文章
- 1如何快速且高效的自学软件测试?听听6年测试总监怎么说...._快速 高效 软件测试
- 2用selenium获取土地交易数据并用百度智慧云API图片转文字_土地交易数据python
- 3SpringCloudConfig使用ssh方式连接GitHub报错JSchException: Auth fail的解决方案
- 4C++ STL unordered_multimap
- 5基于51单片机智能药盒定时吃药喂药蓝牙上传APP设计22-106
- 6Prompt的科学范式(上篇)_prompt的例子
- 7Mysql死锁问题如何排查和解决_mysql死锁排查及解决
- 8微信群发工具-含源代码分享_c++源码,微信群发
- 9工作场所监控革新:思通数科AI大模型在员工睡眠行为识别中的应用
- 10python验证码 识别代码不准_python 验证码识别示例(二) 复杂验证码识别
当前位置: article > 正文
基于视觉的机器人抓取-综述_视觉机器人完成抓取操作任务
作者:AllinToyou | 2024-05-06 09:50:24
赞
踩
视觉机器人完成抓取操作任务
论文:
Vision-based Robotic Grasping From Object Localization, Object Pose Estimation to Grasp Estimation for Parallel Grippers: A Review
总结
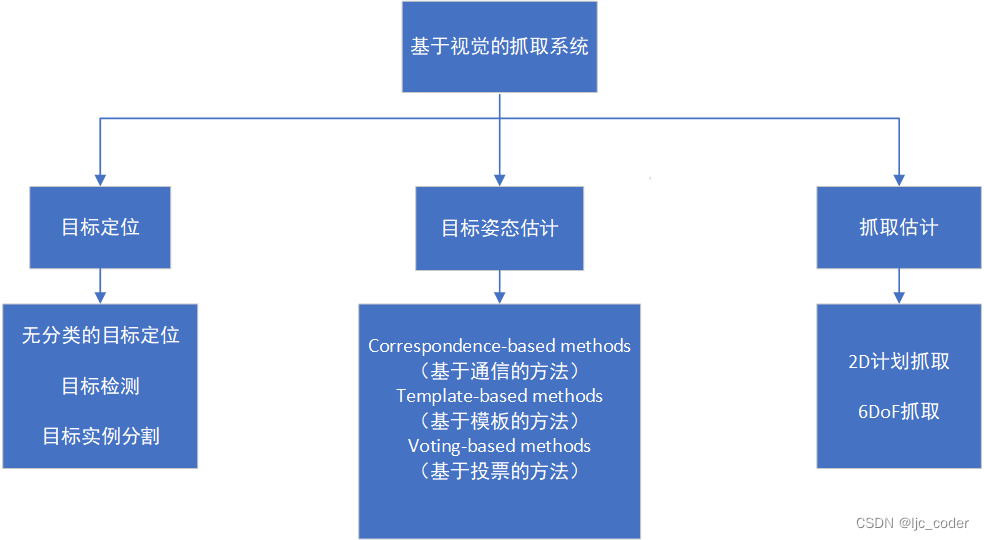
- 文章总结了基于视觉的机器人抓取过程中的三个关键任务:
- 目标定位、目标姿态估计和抓取估计。
- 目标定位任务包括无分类的目标定位、目标检测和目标实例分割:
- 此任务提供输入数据中目标对象的区域。
- 物体姿态估计任务 包括基于对应关系的方法、基于模板的方法和基于投票的方法 :
- 主要是对6D物体姿态进行估计,为已知物体生成抓取姿态。
- 抓取估计任务包括二维平面抓取方法和6自由度抓取方法:
- 注:二维平面抓取方法被约束为从一个方向抓取。
※ 这三项任务可以通过不同的组合来完成机器人的抓取。
- 许多目标姿态估计方法都不需要进行目标定位,而是联合进行目标定位和目标姿态估计。
- 还有些抓取估计方法不进行目标定位和目标姿态估计,直接以端到端的方式进行抓取估计。
图例
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/AllinToyou/article/detail/543669
推荐阅读
相关标签

