
- 1CSS实现两行或多行文本超出用省略号...显示_css超过两行显示为...
- 2EasyAR_实现扫描识别图播放视频_wx中使用easyar识别成功后怎么播放视频或者图片
- 3HTML前端表单校验的方法_html 表单前端判断
- 4MySQL系列-undo_mysql undo
- 5Unity吃豆人项目解析_unity吃豆人遇到的问题
- 6[Unity][UGUI]Tooltip提示框_unity ugui tooltip
- 7【Unity】 在Unity中实现Tcp通讯(3)—— ProtoBuf_unity基于protobuf的网络通讯
- 8预训练模型简介和使用方法_预训练模型怎么用
- 9下载安装MinGW-w64详细步骤(c/c++的编译器gcc的windows版,win10真实可用)
- 10【反渲染高斯】GS-IR: 3D Gaussian Splatting for Inverse Rendering_3d gaussian渲染深度图
记录kitti数据集的坐标系转换问题_kitti数据集中的坐标转换
赞
踩
Calib文件说明
以00000.txt文件为例,详细介绍每行含义
P0: 7.070493000000e+02 0.000000000000e+00 6.040814000000e+02 0.000000000000e+00 0.000000000000e+00 7.070493000000e+02 1.805066000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P1: 7.070493000000e+02 0.000000000000e+00 6.040814000000e+02 -3.797842000000e+02 0.000000000000e+00 7.070493000000e+02 1.805066000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00
P2: 7.070493000000e+02 0.000000000000e+00 6.040814000000e+02 4.575831000000e+01 0.000000000000e+00 7.070493000000e+02 1.805066000000e+02 -3.454157000000e-01 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 4.981016000000e-03
P3: 7.070493000000e+02 0.000000000000e+00 6.040814000000e+02 -3.341081000000e+02 0.000000000000e+00 7.070493000000e+02 1.805066000000e+02 2.330660000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 3.201153000000e-03
R0_rect: 9.999128000000e-01 1.009263000000e-02 -8.511932000000e-03 -1.012729000000e-02 9.999406000000e-01 -4.037671000000e-03 8.470675000000e-03 4.123522000000e-03 9.999556000000e-01
Tr_velo_to_cam: 6.927964000000e-03 -9.999722000000e-01 -2.757829000000e-03 -2.457729000000e-02 -1.162982000000e-03 2.749836000000e-03 -9.999955000000e-01 -6.127237000000e-02 9.999753000000e-01 6.931141000000e-03 -1.143899000000e-03 -3.321029000000e-01
Tr_imu_to_velo: 9.999976000000e-01 7.553071000000e-04 -2.035826000000e-03 -8.086759000000e-01 -7.854027000000e-04 9.998898000000e-01 -1.482298000000e-02 3.195559000000e-01 2.024406000000e-03 1.482454000000e-02 9.998881000000e-01 -7.997231000000e-01
- 1
- 2
- 3
- 4
- 5
- 6
- 7
P0~P4
P0~P4 可以称作相机投影矩阵 ,是由相机一系列内参组成。0~4表示4个相机编号,其中0、1是灰度相机,3、4是彩色相机(分别对应左右两幅图形)。投影矩阵 P ( i ) r e c t P{(i) \atop rect} Prect(i)的每个数值的含义如下:
P
(
i
)
r
e
c
t
=
(
f
(
i
)
u
0
c
i
u
−
f
(
i
)
u
b
i
x
0
f
(
i
)
v
c
i
v
0
0
0
0
1
)
P{(i) \atop rect} = \Biggl(\def\arraystretch{1.5}
f
(
i
)
u
,
f
(
i
)
v
f{(i) \atop u},f{(i) \atop v}
fu(i),fv(i) 是第i幅图像的焦距 (调整镜头前后缩进)
c
(
i
)
u
,
c
(
i
)
v
c{(i) \atop u},c{(i) \atop v}
cu(i),cv(i) 是第i幅图像的主点偏移 (左右成像平面大小)
b
i
x
b{i \atop x}
bxi 是第i号相机到第0号相机的x方向的距离偏移
现将P0可视化 :
# matlab
P0 = [7.070493000000e+02 0.000000000000e+00 6.040814000000e+02 0.000000000000e+00 0.000000000000e+00 7.070493000000e+02 1.805066000000e+02 0.000000000000e+00 0.000000000000e+00 0.000000000000e+00 1.000000000000e+00 0.000000000000e+00]
P0 = reshape(P0,4,3)
P0 = P0'
- 1
- 2
- 3
- 4

矩阵作用: 用于将3D相机坐标系转为2D图像坐标系(成像物理坐标系),具体公式如下:
Y
=
P
r
e
c
t
(
i
)
X
Y=P_{rect}^{(i)}X
Y=Prect(i)X
此外,还需要进行矩阵矫正,因此公式变换为:(此前一直以为是只矫正0号相机,其实不是,所有相机都要乘上这个矩阵)
Y
=
P
r
e
c
t
(
0
)
R
r
e
c
t
(
0
)
X
Y=P_{rect}^{(0)}R_{rect}^{(0)}X
Y=Prect(0)Rrect(0)X
其中,
X
4
∗
1
X_{4*1}
X4∗1是相机坐标系下的坐标,X=(Xc,Yc,Zc,1),
R
4
∗
4
R_{4*4}
R4∗4是0号相机的修正矩阵,可视化结果如下,最后一列一行是增加上去的,
P
r
e
c
t
(
0
)
∈
R
3
∗
4
P_{rect}^{(0)}\in\reals^{3*4}
Prect(0)∈R3∗4,Y=(u,v,1)。

Q: 为什么X维度是4呢?
A:这要从上一步坐标变换说起——从点云坐标系到相机坐标系的转换过后,便获得了上述维度的X,至于怎么变换的,下面会展开来讲。
R0_rect
一个3X3的矩阵,不需要加行或者列,已介绍过,此处不再赘述
Tr_velo_to_cam
将点云转为3D坐标系需要用到如下矩阵:(可以理解为相机外参?,假如世界坐标系与点云坐标系重合,应该可以这么理解),对其可视化后如图所示,其中最后一行(0,0,0,1)是添加上的。

定义: Tr_velo_to_cam是由旋转矩阵+平移矩阵构成,具体含义如下:
T
r
_
v
e
l
o
_
t
o
_
c
a
m
=
[
R
∣
t
]
=
[
r
1
,
1
r
1
,
2
r
1
,
3
t
1
r
2
,
1
r
2
,
2
r
2
,
3
t
2
r
3
,
1
r
3
,
2
r
3
,
3
t
3
]
Tr\_velo\_to\_cam=[R|t]=
可以看到
T
r
_
v
e
l
o
_
t
o
_
c
a
m
∈
R
3
∗
4
Tr\_velo\_to\_cam\in\reals^{3*4}
Tr_velo_to_cam∈R3∗4,因此对点云坐标X=[X,Y,Z]补1得到4行1列矩阵X=[X,Y,Z,1]。这么做的原因不仅是要满足矩阵相乘时的维度对齐,还可以保证加上常数项实施平移操作。为方便理解,可以举个例子: 此处参考链接——包含知识点:世界坐标系到相机坐标系的转换、齐次坐标系
情况1:仅旋转
对(x,y,z)进行旋转操作,若为3*3的矩阵,则只能进行旋转操作,而没有平移操作,所以需要加上常数项,即:将三维的笛卡尔坐标添加一个额外坐标,就可以实现坐标平移,而且保持了三维向量与矩阵乘法具有的缩放和旋转操作。这个就称为齐次坐标,而这种变换也称为仿射变换(affine transformation)。详细操作如下:
[
1
0
0
0
0
2
0
1
0
]
[
x
y
z
]
=
[
x
2
z
y
]
情况2:旋转+平移
[
1
0
0
0
0
0
2
0
0
1
0
3
0
0
0
1
]
[
x
y
z
1
]
=
[
x
2
z
y
+
3
1
]
因此,对于一个n*3的点云,首先要添加1列。对于点云坐标系到2D图像坐标系的变换公式如下:
Y = P r e c t ( i ) T r _ v e l o _ t o _ c a m 4 ∗ 4 X Y=P_{rect}^{(i)}Tr\_velo\_to\_cam_{4*4} X Y=Prect(i)Tr_velo_to_cam4∗4X
Tr_imu_to_velo
与Tr_velo_to_cam类似,不再赘述。
总结:
| P0~P4 | Tr_velo_to_cam |
|---|---|
| 相机内参 | 相机外参 |
| 3D相机坐标系(x,y,z,1) —>2D图像(u,v,1) | 世界坐标系/点云坐标系(X,Y,Z,1) —>3D相机坐标系(x,y,z,1) |
| 维度不变 3*4 | 添加维度 3*4到4*4 |
Tr_velo_to_cam称为外参矩阵,由旋转+平移矩阵构成,为了保证维度,需要同时对点云和矩阵进行升维。总之,就是一个内参、一个外参,一个不加维度,一个变为4*4,相应的数据也都跟着多了一维。看起来似乎很简单,但我还是看了好几天。
可视化
昨天发现了一个很有意思的可视化代码,通过代码发现自己的理解还是有问题,所以下面详细介绍实现过程,包括:
- 点云投影到2D图像
- 3Dbox在点云上的投影
目前只看了这两部分,其他功能有待发现,在这里先放上 Github链接。
安装
这里先讲一下我的环境:Win10+python 3.8,我没有按照作者给的方式安装,因为会报错。mayavi包总是很难安装,还好之前也写了篇博客,不然又摸索很久。
conda create -n kitti_vis python=3.8
conda activate kitti_vis
pip install opencv-python pillow scipy matplotlib
pip install vtk==9.0.1
pip install mayavi==4.7.3
pip install PyQt5
- 1
- 2
- 3
- 4
- 5
- 6
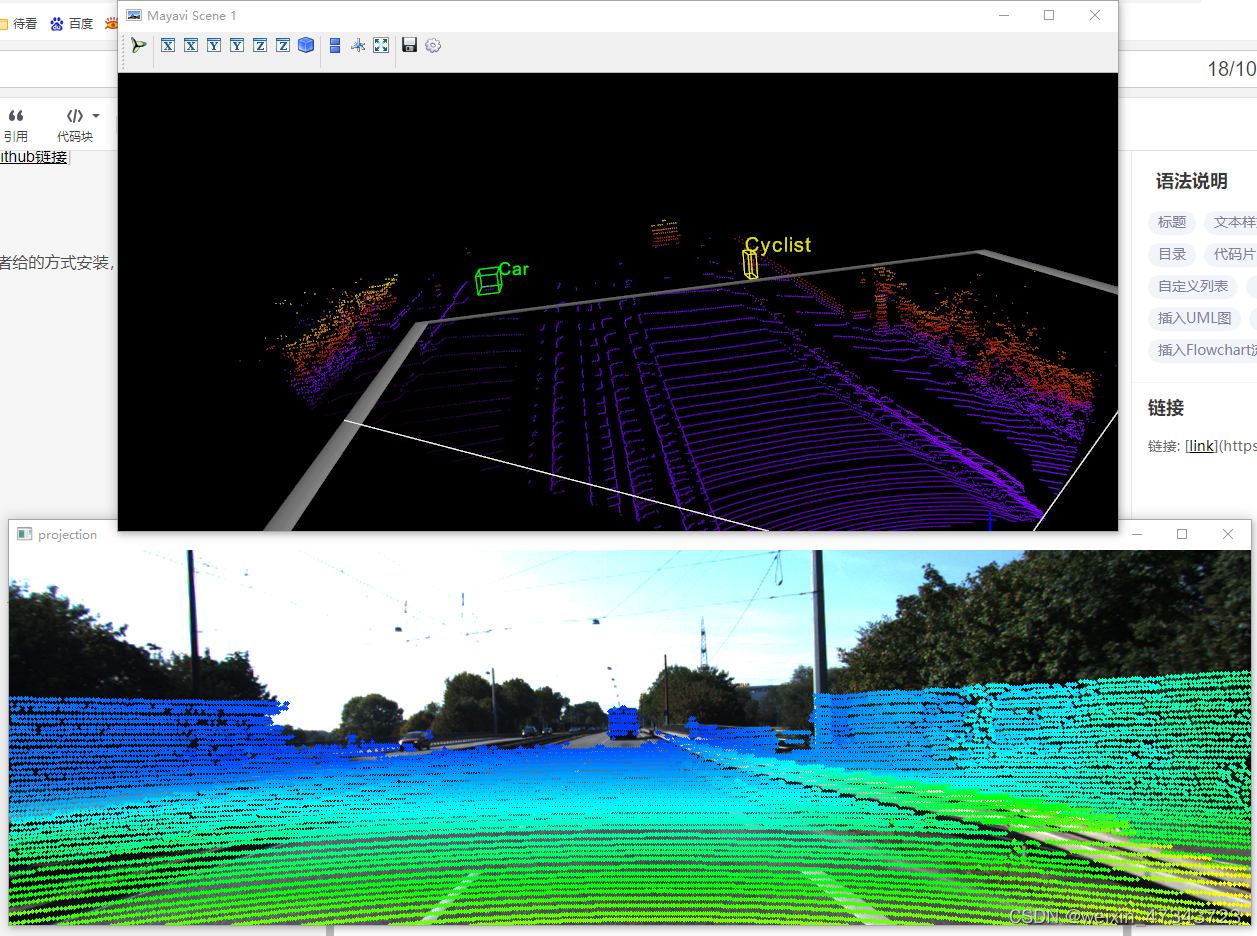
几分钟应该就可以配置完环境,接下来运行以下代码测试
python kitti_object.py --show_lidar_with_depth --img_fov --const_box --vis
- 1
就会出现两个可视化结果,这里展示的是第二个数据:
此次再记录一个windows下使用vscode没办法切换配置环境的问题

使用右边框框换新的终端(我也不太懂),参考链接
投影转换代码
先筛选点云范围,对应到图像上时要小于等于图像的长和宽,大于0
思路: 点云
→
\rightarrow
→ 3D Camera 先添1列,乘外参矩阵,乘R0
# 外参
def project_velo_to_ref(self, pts_3d_velo):
pts_3d_velo = self.cart2hom(pts_3d_velo) # nx4
return np.dot(pts_3d_velo, np.transpose(self.V2C)) # 外参 3*4
# R0
def project_ref_to_rect(self, pts_3d_ref):
""" Input and Output are nx3 points """
return np.transpose(np.dot(self.R0, np.transpose(pts_3d_ref)))
def project_velo_to_rect(self, pts_3d_velo):
pts_3d_ref = self.project_velo_to_ref(pts_3d_velo)
return self.project_ref_to_rect(pts_3d_ref)
project_velo_to_rect(lidar) #调用
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
3D Camera → \rightarrow → 2D image
def project_rect_to_image(self, pts_3d_rect):
""" Input: nx3 points in rect camera coord.
Output: nx2 points in image2 coord.
"""
pts_3d_rect = self.cart2hom(pts_3d_rect)
pts_2d = np.dot(pts_3d_rect, np.transpose(self.P)) # nx3
pts_2d[:, 0] /= pts_2d[:, 2]
pts_2d[:, 1] /= pts_2d[:, 2]
return pts_2d[:, 0:2]
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9

