
热门标签
热门文章
- 1交换机trunk接口发送数据时,数据帧tag和pvid相同和不相同时的区别_port trunk pvid vlan 10
- 2javaWeb项目发布到linux服务器上以及运行项目_javaweb打包到linux运行
- 3compose--附带效应、传统项目集成、导航_remembercoroutinescope
- 4用卷积神经网络(CNN)中的卷积核(过滤器)提取图像特征_cnn提取图像特征
- 5event trigger php,微信小程序 this.triggerEvent()的具体使用
- 6keras: 用time series时间序列做预测_timeseries_dataset_from_array
- 7电动车进电梯监测报警摄像机助力提升安全管理
- 8ChatGPT 可替代?以下7 种 AI 工具更专注于编码
- 9【手游联运平台搭建】游戏平台的作用
- 10安卓获取APP对应的Android id的原理分析_android_id和应用有关吧
当前位置: article > 正文
ubuntu16奥比中光相机标定_astra 相机标定
作者:Gausst松鼠会 | 2024-03-21 10:12:34
赞
踩
astra 相机标定
1、astra相机驱动
2、camera_calibration标定包
下载链接
放到工作空间下编译即可
3、标定
3-1、启动相机
sudo -s
roslaunch astra_launch astra.launch
- 1
- 2
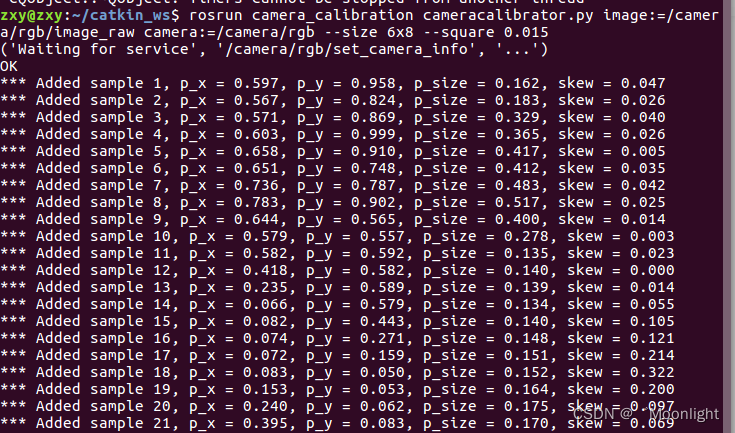
3-2、标定
rosrun camera_calibration cameracalibrator.py image:=/camera/rgb/image_raw camera:=/camera/rgb --size 6x8 --square 0.015
- 1
--size 8x6 为当前标定板的标定角点数
==square 0.015为每个棋盘格的边长,单位为m
image:=image:=/camera/rgb/image_raw 标定当前订阅图像来源的topic
camera:=/rgb为相机话题
- 1
- 2
- 3
- 4
3-3、标定方案
- 方案一:三组,正视14张、仰视14张、俯视14张,所有照片仅相对水平轴旋转,正视照片占相机视野四分之三,俯仰视照片占相机视野四分之一,每组内的14张照片是划出了一个矩形的轮廓,中间2张,四周12张;
- 方案二:三组,正视14张、仰视14张、俯视14张,正视照片无转角(无任何旋转),仰视和俯视的照片成扇面状对着相机(既绕水平轴又绕铅垂轴),正视照片占相机视野四分之三,俯仰视照片占相机视野四分之一,14张照片是划出了一个矩形的轮廓,中间2张,四周12张;
- 方案三:其他与方案二一致,只是仰视和俯视的照片成楔子状对着相机;
- 方案四:三组,正视14张、仰视14张、俯视14张,正视、仰视和俯视的照片全部成扇面状对着相机,正视照片占相机视野四分之三,俯仰视照片占相机视野四分之一,14张照片是划出了一个矩形的轮廓,中间2张,四周12张;
- 方案五:其他与方案四一致,只是正视俯视仰视照片成楔子状对着相机;
- 方案六:先拍四张正视,然后左远右近(就是标定板的左边离相机远右边离相机近,下同)四张,左近右远四张,上远下近四张,上近下远四张——既不是楔子型也不是扇面形;
- 方案七:长轴中线上,均匀变换角度,拍9张,短轴中线上,均匀变化角度,拍9张,然后四个角各补一张,共22张。
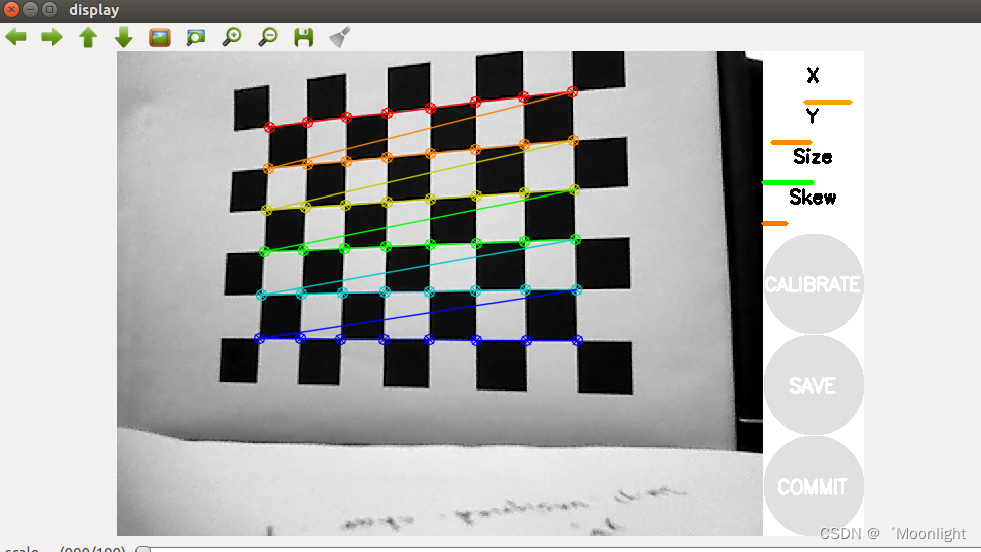
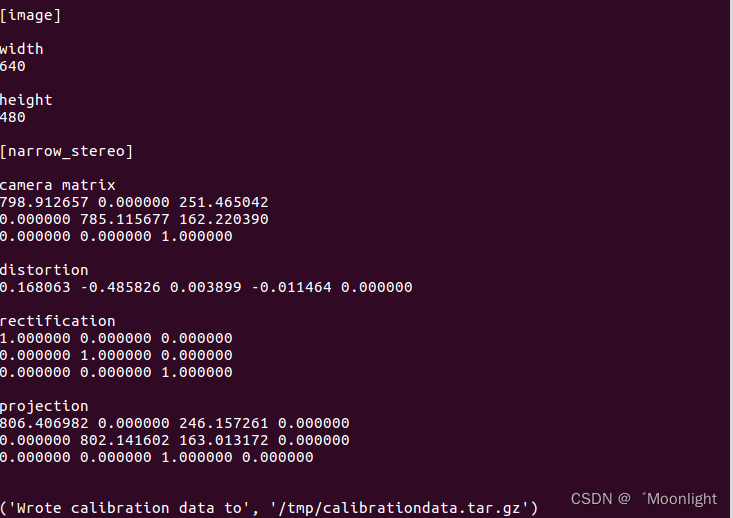
3-4、结果保存
CALIBRATE键 亮即可计算结果
SAVE键 保存结果
COMMIT键 将结果设置为默认参数
4、参考文章
https://blog.csdn.net/zxxxiazai/article/details/108168120
https://blog.csdn.net/YOULANSHENGMENG/article/details/124659099
https://blog.csdn.net/qq_35789421/article/details/99304707
https://blog.csdn.net/zilanpotou182/article/details/68491447
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Gausst松鼠会/article/detail/280334
推荐阅读
相关标签

