
- 1Pycharm安装配置Pyqt5教程(保姆级)_pycharm安装pyqt5
- 2python实现图像的频域滤波_(十)OpenCV-Python学习—频率域滤波
- 3第十七篇【传奇开心果系列】Python的OpenCV库技术点案例示例:自适应阈值二值化处理图像提取文字
- 4Spring框架学习总结_spring框架实验
- 5OpenCV中的形态学_cv2.morph_rect
- 6java 关闭cmd弹窗运行jar包_java执行cmd关闭窗口
- 7C/C++ 开源库及示例代码_c++编写的demo代码,包括使用qt、boost等其他c++库
- 8【ChatGPT修改论文】【中/英双语】GPT论文指令合集(润色、语法修改、降重)_科技论文翻译的gpt指令
- 9[PPT] 主流大语言模型的技术细节_大语言模型ppt
- 10Linux下查看CPU、内存占用率_linux怎么看cpu占用率
图像处理常用算法—6个算子 !!
赞
踩
目录
前言
同图像灰度不同,边界处一般会有明显的边缘,利用此特征可以分割图像。
需要说明的是:边缘和物体间的边界并不等同,边缘指的是图像中像素的值有突变的地方,而物体间的边界指的是现实场景中的存在于物体之间的边界。
有可能有边缘的地方并非边界,也有可能边界的地方并无边缘,因为现实世界中的物体是三维的,而图像只具有二维信息,从三维到二维的投影成像不可避免的会丢失一部分信息;
另外,成像过程中的光照和噪声也是不可避免的重要因素。
正是因为这些原因,基于边缘的图像分割仍然是当前图像研究中的世界级难题,目前研究者正在试图在边缘提取中加入高层的语义信息。
在实际的图像分各种,往往只用到一阶和二阶导数,虽然,原理上可以用更高阶的导数,但是,因为噪声的影响,在纯粹二阶导数操作中就会出现对噪声的敏感现象,三阶以上的导数信息往往失去了应用价值。二阶导数还可以说明灰度突变的类型。
在有些情况下,如灰度变化均匀的图像,只利用一阶导数可能找不到边界,此时,二阶导数就能提供很有用的信息。二阶导数对噪声也比较敏感,解决的方法是先对图像进行平滑滤波,消除部分噪声,再进行边缘检测。不过,利用二阶导数信息的算法是基于过零检测的,因此得到的边缘点数比较少,有利于后继的处理和识别工作。
各种算子的存在就是对这种导数分割原理进行的实例化计算,是为了在计算过程中直接使用的一种计算单位。
1、Sobel 算子
其主要用于边缘检测,在技术上它是以离散型的差分算子,用来运算图像亮度函数的梯度的近似值,Sobel算子是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。Sobel算子对于像素的位置的影响做了加权,与Prewitt算子、Roberts算子相比因此效果更好。
Sobel算子包含两个3x3的矩阵,分别为横向及纵向模板,将之与图像作平面卷积,即可分别得出横向及纵向的亮度差分近似值。在实际应用中,常用如下两个模板来检测图像边缘。
检测水平边缘 横向模板:
检测垂直平边缘 纵向模板:
图像中的每一个像素的横向及纵向梯度近似值可用以下的公式结合,来计算梯度的大小。
然后可用以下公式计算梯度方向。
在以上例子中,如果以上的角度等于零,即代表图像该处拥有纵向边缘,左方较右方暗。
缺点:Sobel算子并没有将图像的主题与背景严格地区分开来,换言之就是 Sobel算子并没有基于图像灰度进行处理,由于Sobel算子并没有严格地模拟人的视觉生理特征,所以提取的图像轮廓有时并不能令人满意。
2、Isotropic Sobel 算子
Sobel算子另一种形式是(Isotropic Sobel)算子,加权平均算子,权值反比于邻点与中心点的距离,当沿不同方向检测边缘时梯度幅度一致,就是通常所说的各向同性Sobel(Isotropic Sobel)算子。模板也有两个,一个是检测水平边缘的,另一个是检测垂直边缘的。各向同性Sobel算子和普通Sobel算子相比,它的位置加权系数更为准确,在检测不同方向的边沿时梯度的幅度一致。
3、Roberts 算子
罗伯茨算子、Roberts算子是一种简单的算子,是一种利用局部差分算子寻找边缘的算子,它采用对角线方向相邻两像素之差近似梯度幅值检测边缘。检测垂直边缘的效果好于斜向边缘,定位精度高,对噪声敏感,无法抑制噪声的影响。1963年,Roberts提出了这种寻找边缘的算子。
Roberts边缘算子是一个2x2的模板,采用的是对角方向相邻的两个像素之差。从图像处理的实际效果来看,边缘定位较准,对噪声敏感。适用于边缘明显且噪声较少的图像分割。Roberts边缘检测算子是一种利用局部差分算子寻找边缘的算子,Roberts算子图像处理后结果边缘不是很平滑。经分析,由于Roberts算子通常会在图像边缘附近的区域内产生较宽的响应,故采用上述算子检测图像常需做细化处理,边缘定位的精度不是很高。
4、Prewitt 算子
Prewitt算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用。其原理是图像空间利用两个方向模板与图像进行邻域卷积来完成的,这两个方向模板一个检测水平边缘,一个检测垂直边缘。
对数字图像 f(x,y),Prewitt算子的定义如下:
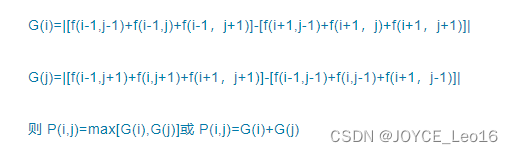
经典Prewitt算子认为:凡灰度新值大于或等于阈值的像素点都是边缘点。即选择适当的阈值T,若P(i,j)≥T,则(i,j)为边缘点,P(i,j)为边缘图像。这种判定是欠合理的,会造成边缘点的误判,因为许多噪声点的灰度值也很大,而且对于幅值较小的边缘点,其边缘反而丢失了。
Prewitt算子对噪声有抑制作用,抑制噪声的原理是通过像素平均,但是像素平均相当于对图像的低通滤波,所以Prewitt算子对边缘的定位不如Roberts算子。
因为平均能减少或消除噪声,Prewitt梯度算子法就是先求平均,再求差分来求梯度。水平和垂直梯度模板分别为:
检测水平边缘 横向模板 :
检测垂直边缘 纵向模板 :
该算子与Sobel算子类似,只是权值有所变化,但两者实现起来功能还是有差距的,据经验得知Sobel要比Prewitt更能准确检测图像边缘。
5、Laplacian算子
Laplace算子是一种各向同性算子,二阶微分算子,在只关心边缘的位置而不考虑其周围的象素灰度差值时比较合适。Laplace算子对孤立象素的响应要比对边缘或线的响应要更强烈,因此只适用于无噪声图象。存在噪声情况下,使用Laplacian算子检测边缘之前需要先进行低通滤波。所以,通常的分割算法都是把Laplacian算子和平滑算子结合起来生成一个新的模板。
拉普拉斯算子也是最简单的各向同性微分算子,具有旋转不变性。一个二维图像函数的拉普拉斯变换是各向同性的二阶导数,定义了更适合于数字图像处理,将拉式算子表示为离散形式:
![]()
离散拉普拉斯算子的模板:
其扩展模板:
拉式算子用来改善因扩散效应的模糊特别有效,因为它符合降制模型。扩散效应是成像过程中经常发生的现象。
Laplacian算子一般不以其原始形式用于边缘检测,因为其作为一个二阶导数,Laplacian算子对噪声具有无法接受的敏感性;同时其幅值产生算边缘,这是复杂的分割不希望有的结果;最后Laplacian算子不能检测边缘的方向;
所以Laplacian在分割中所起的作用包括:(1)利用它的零交叉性质进行边缘定位;(2)确定一个像素是在一条边缘暗的一面还是亮的一面;一般使用的是高斯型拉普拉斯算子(Laplacian of a Gaussian,LoG),由于二阶导数是线性运算,利用LoG卷积一幅图像与首先使用高斯型平滑函数卷积改图像,然后计算所得结果的拉普拉斯是一样的。所以在LoG公式中使用高斯函数的目的就是对图像进行平滑处理,使用Laplacian算子的目的是提供一幅用零交叉确定边缘位置的图像;图像的平滑处理减少了噪声的影响并且它的主要作用还是抵消由Laplacian算子的二阶导数引起的逐渐增加的噪声影响。
6、Canny算子
该算子功能比前面几种都要好,但是它实现起来较为麻烦,Canny算子是一个具有滤波,增强,检测的多阶段的优化算子,在进行处理前,Canny算子先利用高斯平滑滤波器来平滑图像以除去噪声,Canny分割算法采用一阶偏导的有限差分来计算梯度幅值和方向,在处理过程中,Canny算子还将经过一个非极大值抑制的过程,最后Canny算子还采用两个阈值来连接边缘。
Canny边缘检测算法:
- 用高斯滤波器平滑图象;
- 用一阶偏导的有限差分来计算梯度的幅值和方向;
- 对梯度幅值进行非极大值抑制
- 用双阈值算法检测和连接边缘
详解:
http://www.cnblogs.com/cfantaisie/archive/2011/06/05/2073168.html
(1)图象边缘检测必须满足两个条件:一能有效地抑制噪声;二必须尽量精确确定边缘的位置。
(2)根据对信噪比与定位乘积进行测度,得到最优化逼近算子。这就是Canny边缘检测算子。
(3)类似与Marr(LoG)边缘检测方法,也属于先平滑后求导数的方法。
参考:小白学视觉

