
- 1分布式和微服务
- 2阿里云服务器受攻击总结_通过系统地尝试所有可能的密码组合来猜测密码
- 3java web java关系_【JavaWeb】79:JavaScript和Java的关系?
- 4JSP session对象_jsp session撖寡情
- 5[AI]如何让语言模型LLMs流式输出:HuggingFace Transformers实现_大模型流式输出
- 6python NSGA-II 算法_nsga2算法python
- 7解决IDEA搜不到插件
- 8CSS基本知识点总结_css知识点总结
- 9《Spring Boot》 application.properties 官方文档_springboot application.properties 官方
- 10每周AI新闻(2024年第5周)ChatGPT等多应用登陆 Vision Pro | 字节Coze国内版上线等_coze小说写作
离散余弦变换滤波算法(DCT)_dct算法
赞
踩
离散余弦变换滤波算法(DCT)
之前介绍的所有滤波算法都是空间域滤波算法(即2D滤波算法),今天来介绍一下频率域滤波算法,之后还会介绍时间域滤波算法(即3D滤波算法),敬请期待。
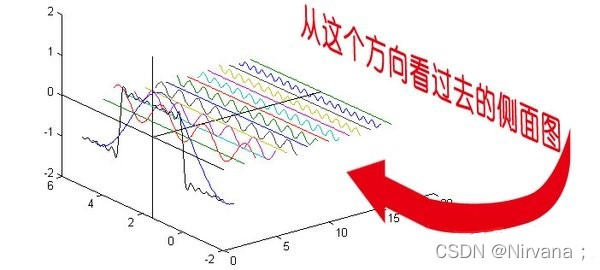
时间域相对于空间域增加了一个时间维度,可以对不同时间段的图像进行处理,对时域噪声有很好的抑制作用。而频率域又是一个全新的维度,换个角度看问题,将图像转换到频域,高频部分代表图像的细节、纹理信息,低频部分代表图像的轮廓信息,可以再特定的“频率”范围内对图像进行处理,就像是用显微镜看图像一样,能挖掘图像更加广阔的信息。
在图像处理中,图像为离散二维矩阵,所以算法都是离散形式。离散余弦变换是一种频率域转为到空间域的数学工具(函数),它为频率域与空间域架起一座桥梁。离散余弦变换是离散傅里叶变换(DFT)的一种特殊形式,特殊点就在于其原始变换信号是一个实偶函数。DCT变换较DFT变换具有更好的频域能量聚集度,那么对于那些不重要的频域区域和系数就能够直接裁剪掉,因此,DCT变换非常适合于图像压缩算法的处理,例如现在大名鼎鼎的jpeg就是使用了DCT作为图像压缩算法。

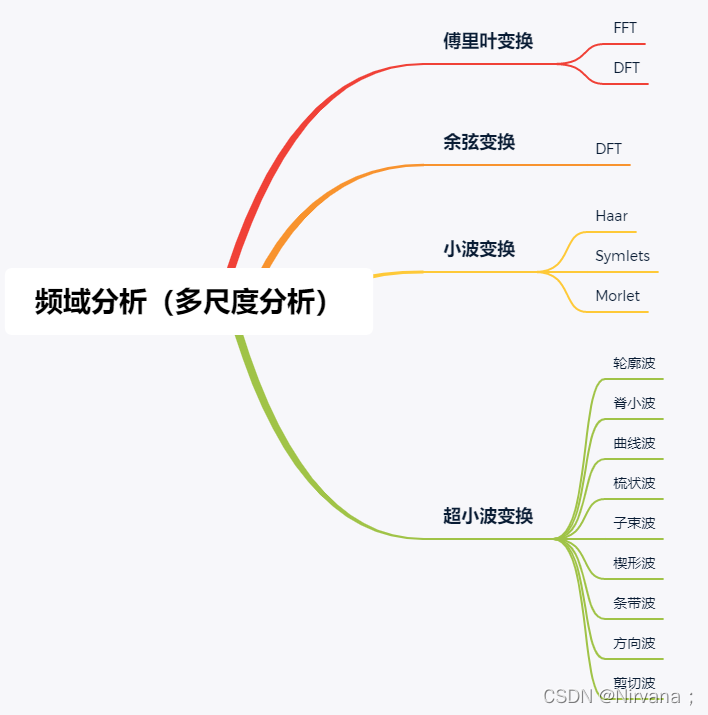
离散余弦变换,本质上是一种数学方法。它与傅立叶变换,小波变换,超小波变换,这些变换本质都是一种基变换,对于不同的系统,不同的研究对象,我们可以选取不同的基来让研究和分析变得更加简单。比如因为复指数信号是线性时不变系统的特征函数,因此我们在研究线性时不变系统及其特性时通常采用傅立叶变换,选取了一组好的基,可以让问题变得简单,比如我们的现在机器学习里很多的降维算法,像PCA,K-L变换也是基变换,对于一些基可能会出现很多很小的系数,或者是零系数,这要用这组基去表示这一信号或者向量时也就更加的简洁,而越是简洁就越于分析。
二维DCT变换公式如下:
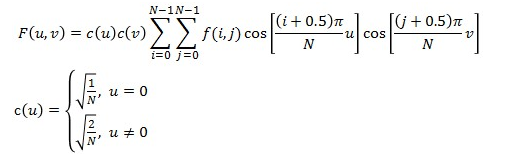
由公式我们可以看出,上面只讨论了二维图像数据为方阵的情况,在实际应用中,如果不是方阵的数据一般都是补齐之后再做变换的,重构之后可以去掉补齐的部分,得到原始的图像信息,这个尝试一下,应该比较容易理解
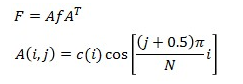
另外,由于DCT变换高度的对称性,在使用Matlab进行相关的运算时,我们可以使用更简单的矩阵处理方式:
DCT变换与IDCT变换,MATLAB代码实现:
clear; clc; % 正变换 X=round(rand(4)*100) %产生随机矩阵 A=zeros(4); for i=0:3 for j=0:3 if i==0 a=sqrt(1/4); else a=sqrt(2/4); end A(i+1,j+1)=a*cos(pi*(j+0.5)*i/4); end end Y=A*X*A' %DCT变换 %反变换 for i=0:3 for j=0:3 if i==0 a=sqrt(1/4); else a=sqrt(2/4); end A(i+1,j+1)=a*cos(pi*(j+0.5)*i/4); %生成变换矩阵 end end X1=A'*Y*A %DCT反变换恢复的矩阵 % Matlab版 YY=dct2(X) %Matlab自带的dct变换 XX=idct2(YY) %Matlab自带的idct逆变换

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
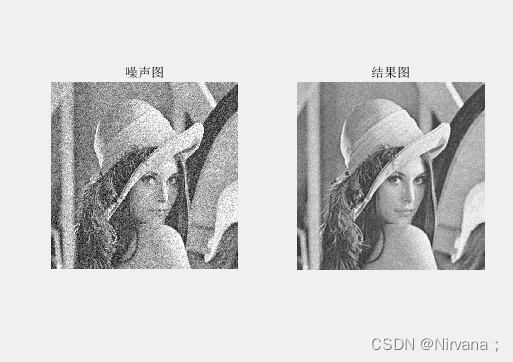
因为噪声主要存在于高频信息中,对高频信息进行适当抑制,可以起到图像去噪的作用,这里采用简单高频抑制方法,可以降噪但也会丢失细节,中间处理的方法还有很多就不一一列举,MATLAB代码如下:
%读取图像 X=imread('lena.jpg'); X=rgb2gray(X); %读取图像尺寸 [m,n]=size(X); %给图像加噪 Xnoised=imnoise(X,'gaussian',0.01); %输出加噪图像 subplot(121); imshow(Xnoised); %DCT变换 Y=dct2(Xnoised); I=zeros(m,n); %高频抑制 I(1:m/3,1:n/3)=1; Ydct=Y.*I; %逆DCT变换 Y=uint8(idct2(Ydct)); %结果输出 subplot(122); imshow(Y);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
C++代码如下:
#include <opencv2/core.hpp> #include <opencv2/highgui.hpp> #include <iostream> #include <math.h> #include <complex> const int height = 128, width = 128, channel = 3; // DCT hyper-parameter int T = 8; int K = 8; // DCT coefficient struct dct_str { double coef[height][width][channel]; }; // Discrete Cosine transformation dct_str dct(cv::Mat img, dct_str dct_s){ double I; double F; double Cu, Cv; for (int ys = 0; ys < height; ys += T){ for (int xs = 0; xs < width; xs += T){ for (int c = 0; c < channel; c++){ for (int v = 0; v < T; v ++){ for (int u = 0; u < T; u ++){ F = 0; if (u == 0){ Cu = 1. / sqrt(2); } else{ Cu = 1; } if (v == 0){ Cv = 1. / sqrt(2); }else { Cv = 1; } for (int y = 0; y < T; y++){ for(int x = 0; x < T; x++){ I = (double)img.at<cv::Vec3b>(ys + y, xs + x)[c]; F += 2. / T * Cu * Cv * I * cos((2. * x + 1) * u * M_PI / 2. / T) * cos((2. * y + 1) * v * M_PI / 2. / T); } } dct_s.coef[ys + v][xs + u][c] = F; } } } } } return dct_s; } // Inverse Discrete Cosine transformation cv::Mat idct(cv::Mat out, dct_str dct_s){ double f; double Cu, Cv; for(int ys = 0; ys < height; ys += T){ for(int xs = 0; xs < width; xs += T){ for(int c = 0; c < channel; c++){ for(int y = 0; y < T; y++){ for(int x = 0; x < T; x++){ f = 0; for (int v = 0; v < K; v++){ for (int u = 0; u < K; u++){ if (u == 0){ Cu = 1. / sqrt(2); } else { Cu = 1; } if (v == 0){ Cv = 1. / sqrt(2); } else { Cv = 1; } f += 2. / T * Cu * Cv * dct_s.coef[ys + v][xs + u][c] * cos((2. * x + 1) * u * M_PI / 2. / T) * cos((2. * y + 1) * v * M_PI / 2. / T); } } f = fmin(fmax(f, 0), 255); out.at<cv::Vec3b>(ys + y, xs + x)[c] = (uchar)f; } } } } } return out; } // Main int main(int argc, const char* argv[]){ // read original image cv::Mat img = cv::imread("lena.jpg", cv::IMREAD_COLOR); // DCT coefficient dct_str dct_s; // output image cv::Mat out = cv::Mat::zeros(height, width, CV_8UC3); // DCT dct_s = dct(img, dct_s); // IDCT out = idct(out, dct_s); cv::imwrite("out.jpg", out); //cv::imshow("answer", out); //cv::waitKey(0); cv::destroyAllWindows();
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
Python代码如下:
import cv2 import numpy as np import matplotlib.pyplot as plt # DCT hyoer-parameter 超参数 T = 8 K = 8 channel = 3 # DCT weight def w(x, y, u, v): cu = 1. cv = 1. if u == 0: cu /= np.sqrt(2) if v == 0: cv /= np.sqrt(2) theta = np.pi / (2 * T) return (( 2 * cu * cv / T) * np.cos((2*x+1)*u*theta) * np.cos((2*y+1)*v*theta)) # DCT def dct(img): H, W, _ = img.shape F = np.zeros((H, W, channel), dtype=np.float32) for c in range(channel): for yi in range(0, H, T): for xi in range(0, W, T): for v in range(T): for u in range(T): for y in range(T): for x in range(T): F[v+yi, u+xi, c] += img[y+yi, x+xi, c] * w(x,y,u,v) return F # IDCT def idct(F): H, W, _ = F.shape out = np.zeros((H, W, channel), dtype=np.float32) for c in range(channel): for yi in range(0, H, T): for xi in range(0, W, T): for y in range(T): for x in range(T): for v in range(K): for u in range(K): out[y+yi, x+xi, c] += F[v+yi, u+xi, c] * w(x,y,u,v) out = np.clip(out, 0, 255) out = np.round(out).astype(np.uint8) return out # Read image img = cv2.imread("imori.jpg").astype(np.float32) # DCT F = dct(img) # IDCT out = idct(F) # Save result cv2.imshow("result", out) cv2.waitKey(0) cv2.imwrite("out.jpg", out)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73

