
热门标签
热门文章
- 12022Android春招面试,实战分析_andorid注册广播 2022
- 2校园招聘的在线测评怎么回答?有什么标准?_校招性格测试怎么答比较好
- 3netstat命令与/proc/net/tcp文件
- 4git .gitignore 文件 参数模板_gitignore 参数
- 5Git 提交commit排除要忽略的文件-简单2步搞定(class文件都可以忽略)_gitignore忽略class
- 6深度学习中梯度及梯度法_深度学习 梯度
- 7从零构建属于自己的GPT系列5:模型部署1(文本生成函数解读、模型本地化部署、文本生成文本网页展示、代码逐行解读)_gpt本地模型部署
- 8ios微信浏览器App下载链接怎样跳转到苹果App Store_ios在微信浏览器跳转appstore
- 9ClickHouse消费Kafka
- 10人物百度百科如何创建?人物类词条编辑指南
当前位置: article > 正文
ACC——carsim与simulink联合仿真_simulink acc算法
作者:weixin_40725706 | 2024-04-19 23:23:35
赞
踩
simulink acc算法
说明:资料来自B站视频——小明师兄(第十课基于CarSim和Simulink开发ACC算法)
作为笔记方便自己回顾
要求︰
1.道路可调整.直线,转弯(弧度可调整)。
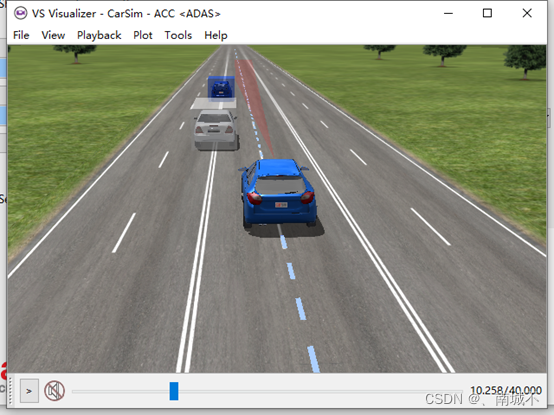
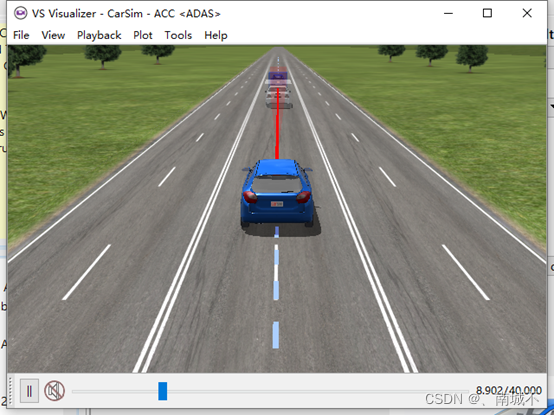
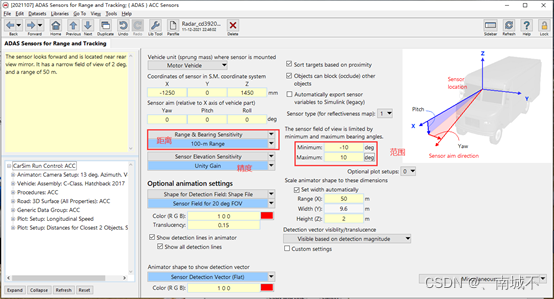
2,后车雷达的参数:雷达主瓣范围(上图中浅红色区域).检测距离范围(上图中红色直线).检测精度等。
3,前车车速可按需求调整。
4.后车的跟车策略可调整(如设定跟车距离.加速减速的加速度范围极限值.)。5.需要的输出:
a)整个过程中后车加速度曲线图.b)两车全程速度曲线
c)行车轨迹
d全程中雷达探测前后车距
备注:
1,希望能够按上述需求建立模型.在各种工况下(直线/弯道.弯道角度.两车入弯速度).
调整跟车策略。
2.请问后车车速能否能够按需求自由控制?比方说参照实时得到的与前车车距以及后车加速度大小来时时控制大小等?
我想做的是∶后车(装有雷达的)加速度需在一定范围内(比方说±1mvs , ±2m s等),设定跟车策略。我能否按照一个设定的曲线来控制后车车速?
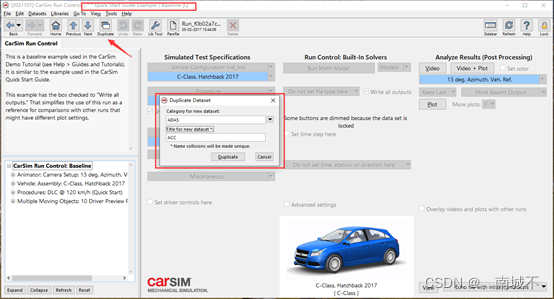
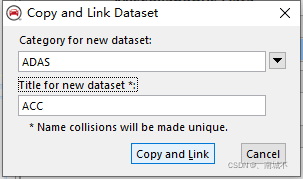
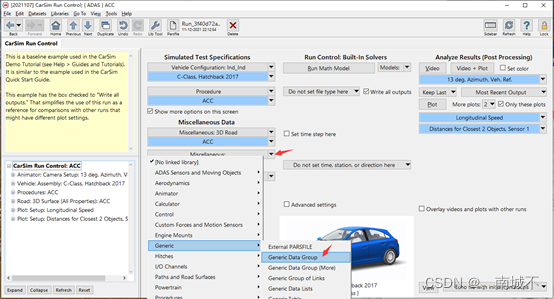
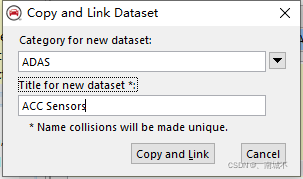
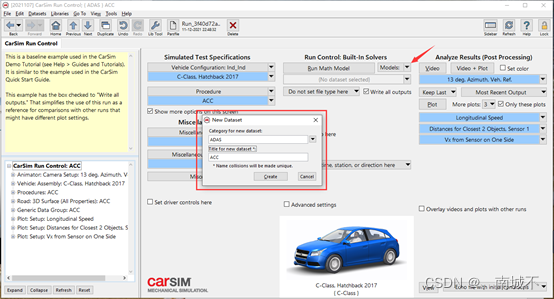
1、新建。
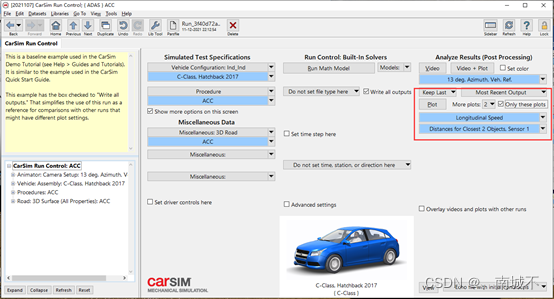
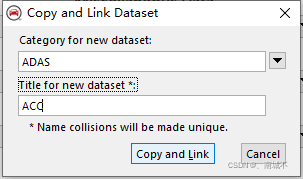
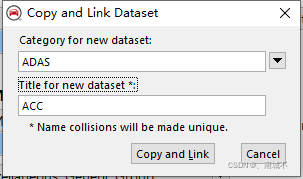
2、复制工况——修改。
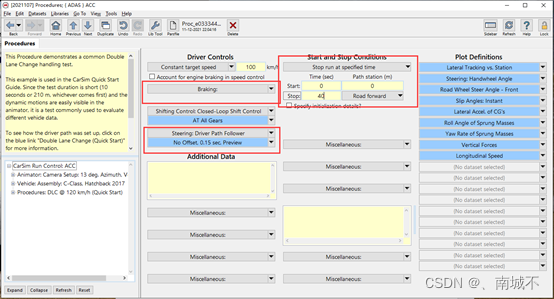
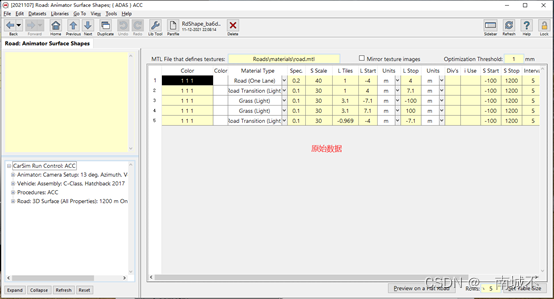
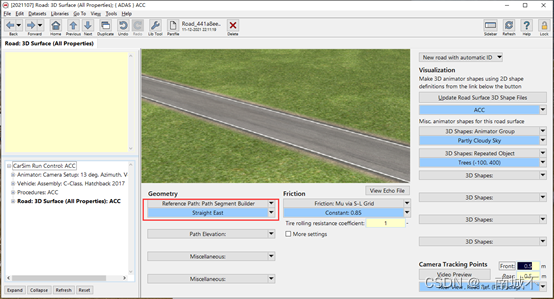
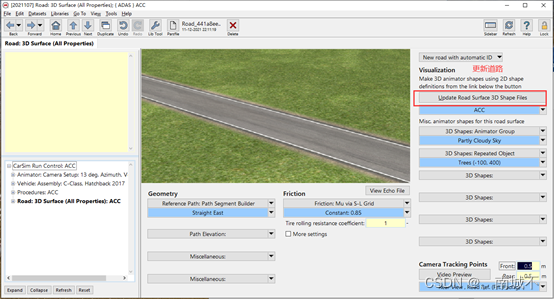
3、3D道路——直线——复制。
更改道路——复制——修改。
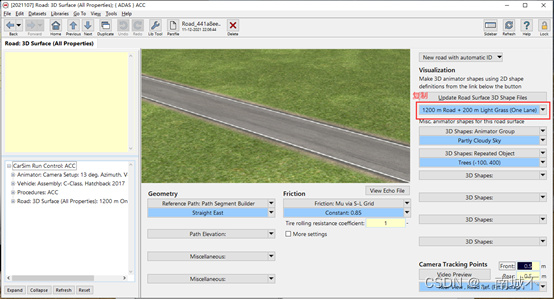
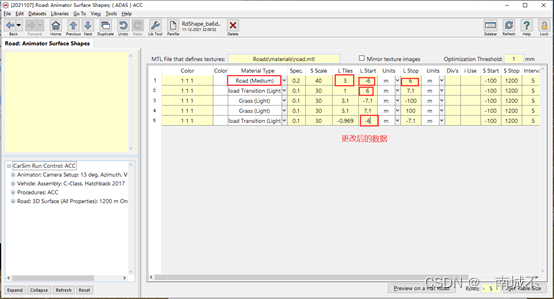
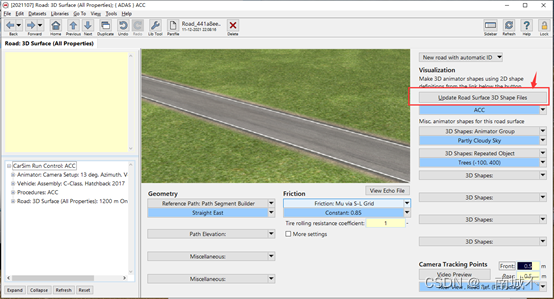
注意:一定要更新。
额外知识(直道改弯道,后续过程不使用,自行学习)


更新道路很重要。
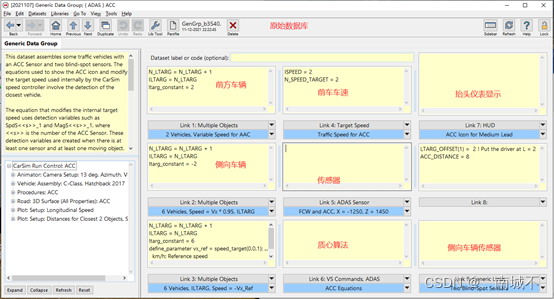
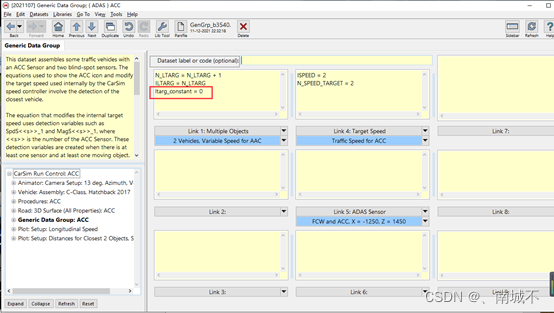
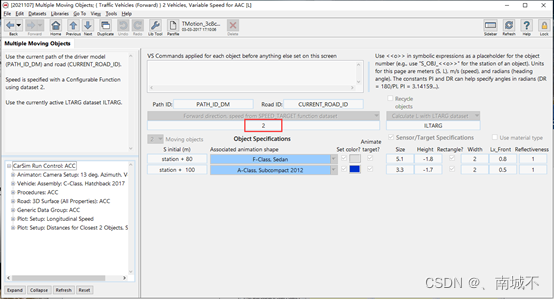
4、设置前车参数。

5、复制——修改。
修改后

6、修改车的位置。
补充,ID序号要相同
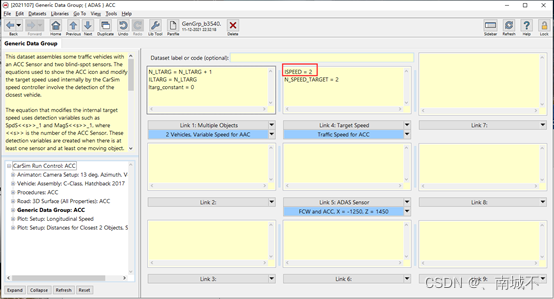
7、设置雷达参数。
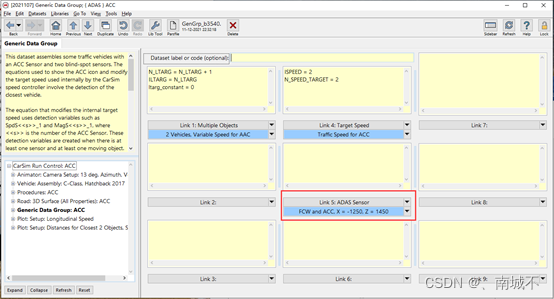
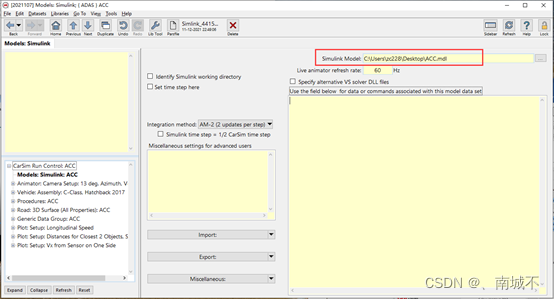
8、设置simulink接口。
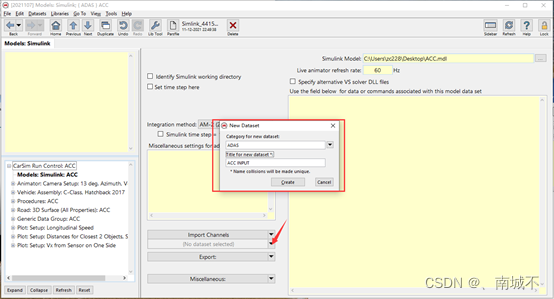
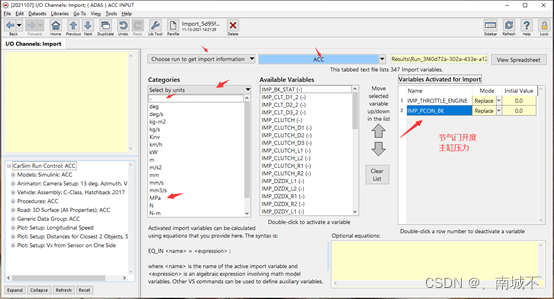
9、ACC INPUT
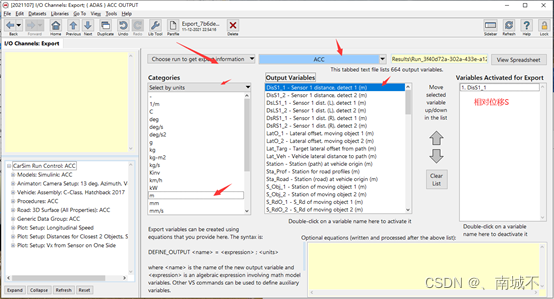
10、ACC OUTPUT
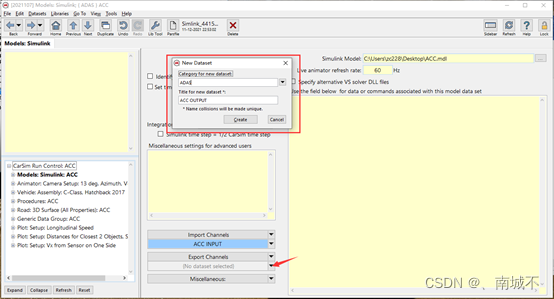
11、发送到simulink。

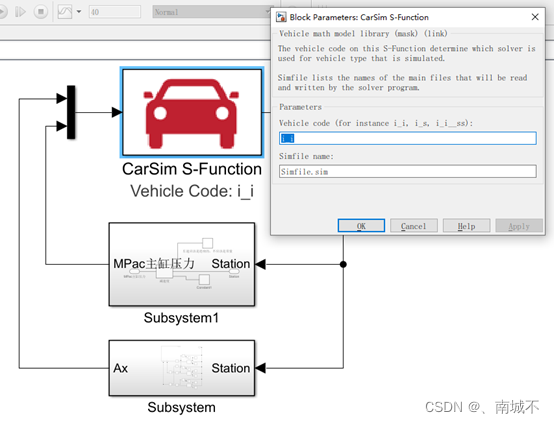
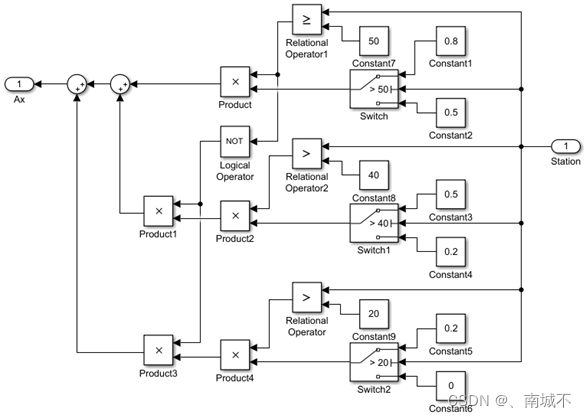
12、simulink算法。(可以参考一些硕士论文搭建ACC算法)
13、完成。
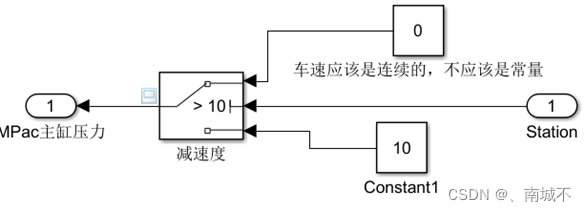
14、算法补充。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/weixin_40725706/article/detail/454147
推荐阅读


相关标签

