
- 1ATF-BL32:TEE OS的启动过程_kernel el3 bl32
- 2dbeaver连接Oracle数据库
- 3机器学习发展与未来_机器学习的认知未来发展方向
- 4Scrum敏捷开发_敏捷开发 因子
- 5【linux】find命令详解
- 62021年危险化学品经营单位安全管理人员考试题及危险化学品经营单位安全管理人员免费试题_贰005年六月某职业病防治所接到报告某电气公司员工杨某由于三氯乙烯中毒导致
- 7Android网络基础1——网络分层_android 开发七层模型
- 8chat-gpt-3.5 web端免费啦!_chatgpt3.5免费网站
- 9stable_diffusion api调用sdxl1.0模型示例_stable diffusion xl 1.0 api
- 10python操作Windows窗口程序
C语言的内存分配_c语言中数量分配
赞
踩
01、ANSI C
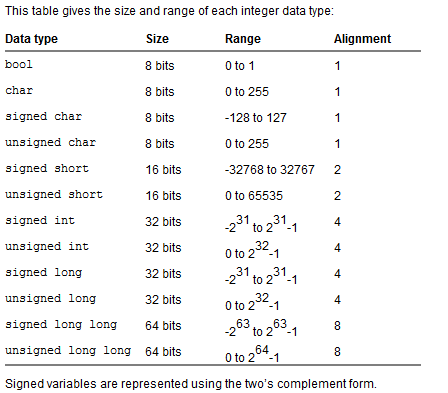
在ANSI C中数据类型包括:整形,浮点型,指针和聚合型(如数组和结构等)
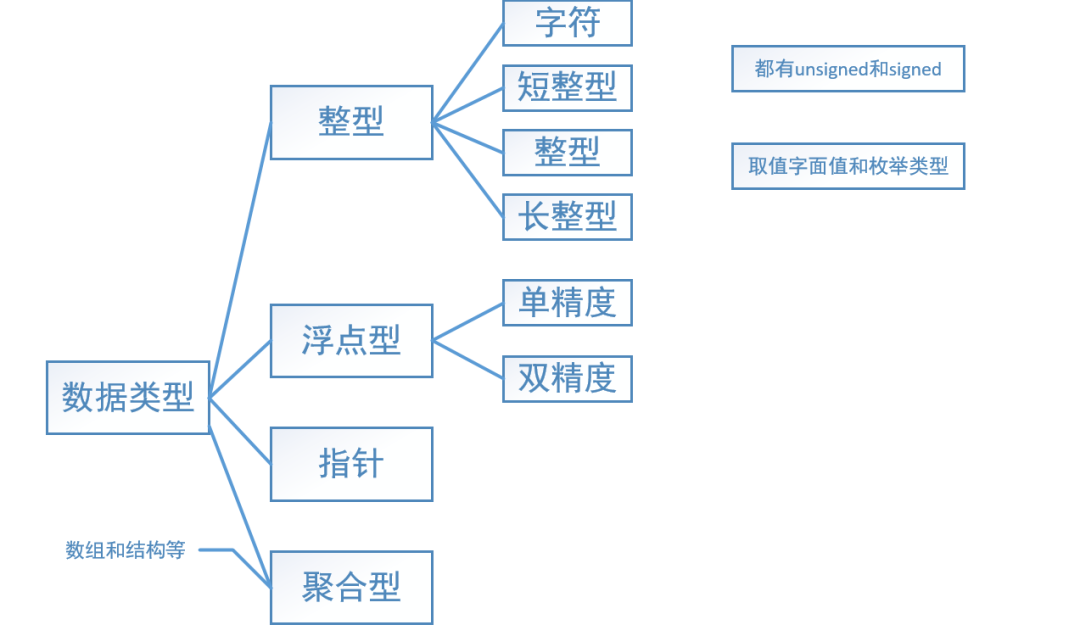
整形:
字符,短整型,整型和长整型,他们都分别有有符号(singed)和无符号(unsingned)
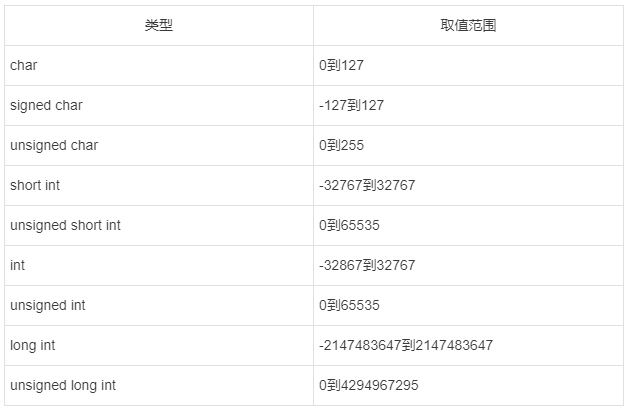
取值范围:
没有带signed或者unsigned,默认signed
长整型至少应该和整型一样长,而整型至少应该和短整型一样长
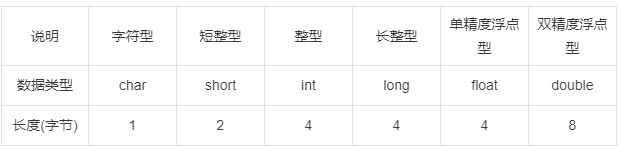
在32位环境中,各种数据类型的长度一般如下:
02、ARM C
具体我们以IAR为编译器,版本7.2
注意:
在32位ARM中,字是32位,半字是16位,字节是8位
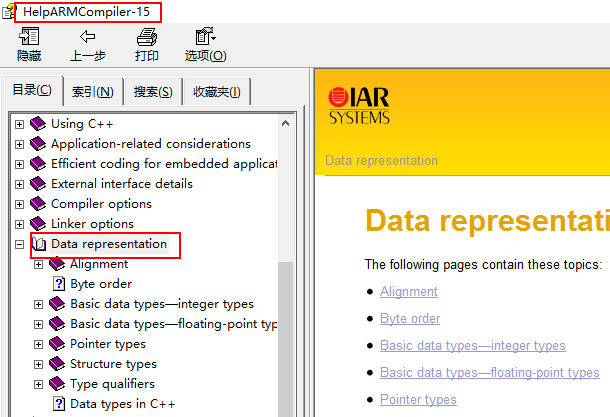
可以看到以下关于整型的数据类型
下面使用typedef重新定义数据类型,没有使用到long,因为都是32位的有一个int就够了
- typedef unsigned char uint8; //!< 无符号8位整型变量
- typedef signed char int8; //!< 有符号8位整型变量
- typedef unsigned short uint16; //!<无符号16位整型变量
- typedef signed short int16; //!< 有符号16位整型变量
- typedef unsigned int uint32; //!< 无符号32位整型变量
- typedef signed int int32; //!<有符号32位整型变量
- typedef float fp32; //!< 单精度浮点数(32位长度)
- typedef double fp64; //!< 双精度浮点数(64位长度)
03、C语言内存分配方法
在标准C语言中,编译出来的可执行程序分为代码区(text)、数据区(data)和未初始化数据区(bss)3个部分。如下代码
- #include <stdlib.h>
- int a = 0; //a在全局已初始化数据区
- char *p1; //p1在BSS区(未初始化全局变量)
- void main()
- {
- int b; //b在栈区
- int c; //C为全局(静态)数据,存在于已初始化数据区
- char s[] = "abc"; //s为数组变量,存储在栈区,
- char *p2,*p3; //p2、p3在栈区
- p2 = (char *)malloc(10);//分配得来的10个字节的区域在堆区
- p3 = (char *)malloc(20);//分配得来的20个字节的区域在堆区
- free(p2);
- free(p3);
- }
使用linux编译之后得到的可执行文件如下

可以看到代码区(text)、数据区(data)和未初始化数据区(bss)。
代码段(text):存放代码的地方。只能访问,不能修改,代码段就是程序中的可执行部分,直观理解代码段就是函数堆叠组成的。
数据段(data):全局变量和静态局部变量存放的地方。也被称为数据区、静态数据区、静态区:数据段就是程序中的数据,直观理解就是C语言程序中的全局变量。注意是全局变量或静态局部变量,局部变量不算。
未初始化数据区(bss):bss段的特点就是被初始化为0,bss段本质上也是属于数据段。
那么问题来了,为什么要区分data段和bss段呢?
以下面代码为例,a.c和b.c的差异只是有没有给arr数组赋值。
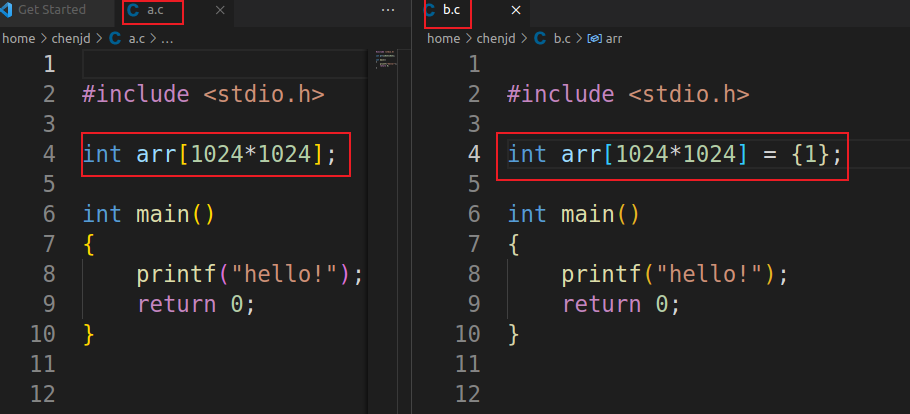
可以看到a.out的bss段大,b.out的data段大。但是b.out的文件大小明显比a.out的大很多。
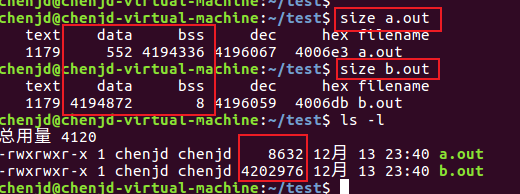
那么就可以简单理解为,data段会增大可执行文件的大小,而bss段不会。
这里我说下自己的理解,我并没有找到资料验证:
data段是全局变量,但是需要初始化值,上面我的例子是全部初始全部为1,但也可能是1024*1024个不同的数据,而这些数据需要保存起来,表现出来也就是需要保存在可执行文件中。
bss段也是全局变量,但不需要初始化值,只需要保存一下这个全部变量的保存的数据类型和大小即可。即使它的数组容量是1024*1024,也不会占用很多可执行文件的大小。
这里再说明一个问题:如果一个全部变量初始化为0,那么它也是bss段,不是data段,即使你代码中把它初始化为0了。这点大家可以自行验证。
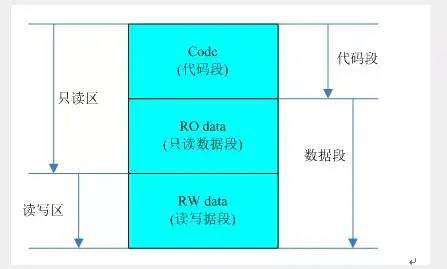
关于数据段,也就是data段,也会分为RO data(只读数据段)和RW data(读写数据段)。
从字面意思就可以区分他们的意思,不同的是:
只读数据段:程序使用的一些不会被更改的数据,使用这些数据的方式类似查表式的操作,由于这些变量不需要更改,因此只需要放置在只读存储器中即可。
读写数据段:程序中是可以被更改的数据,且初始化过的,所以需要放置在RAM中,且初始化的内容放在存储器中(表现为放入可执行文件中)。
这样又可以分区只读区和读写区域,如下所所示(当然bss段和下文的堆栈也是读写区)
上面说到“编译出来的可执行程序分为代码区(text)、数据区(data)和未初始化数据区(bss)3个部分”,那运行中就会多出来一些区域,这就是我们常说的堆栈,注意堆栈是两个区域堆和栈。
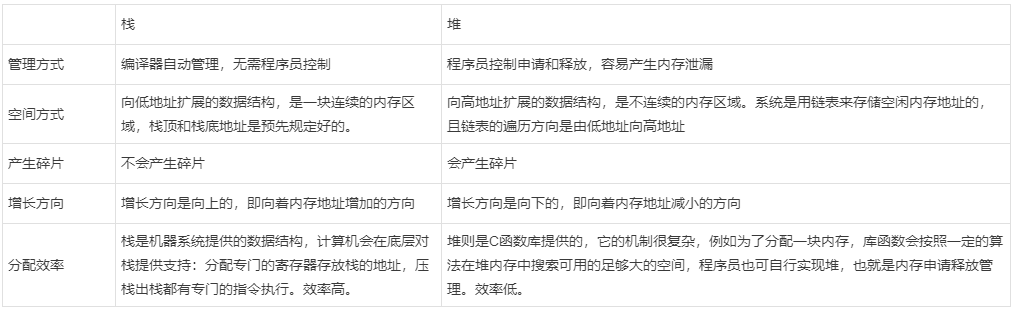
栈:局部变量、函数一般在栈空间中。运行时自动分配&自动回收:栈是自动管理的,程序员不需要手工干预。方便简单。是提前分配好的连续的地址空间。栈的增长方向是向下的,即向着内存地址减小的方向。
堆:堆内存管理者总量很大的操作系统内存块,各进程可以按需申请使用,使用完释放。程序手动申请&释放:手工意思是需要写代码去申请malloc和释放free。可以是不连续的地址空间。堆的增长方向是向上的,即向着内存地址增加的方向。
下面是简单的演示代码
- #include <stdlib.h>
- #include <stdio.h>
-
- int bss_var; //未初始化全局数据存储在BSS区
- int data_var=42; //初始化全局数据存储在数据区
-
- int main(int argc,char *argv[])
- {
- char *p ,*b;
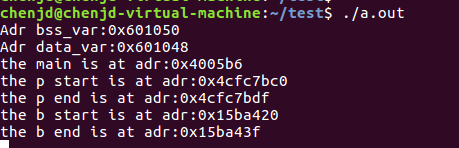
- printf("Adr bss_var:0x%x\n",&bss_var);
- printf("Adr data_var:0x%x\n",&data_var);
- printf("the %s is at adr:0x%x\n","main",&main);
- p=(char *)alloca(32); //从栈中分配空间
- if(p!=NULL)
- {
- printf("the p start is at adr:0x%x\n",p);
- printf("the p end is at adr:0x%x\n",p+31);
- }
- b=(char *)malloc(32*sizeof(char)); //从堆中分配空间
- if(b!=NULL)
- {
- printf("the b start is at adr:0x%x\n",b);
- printf("the b end is at adr:0x%x\n",b+31);
- }
- free(b); //释放申请的空间,以避免内存泄漏
- while(1);
- }
运行结果如下
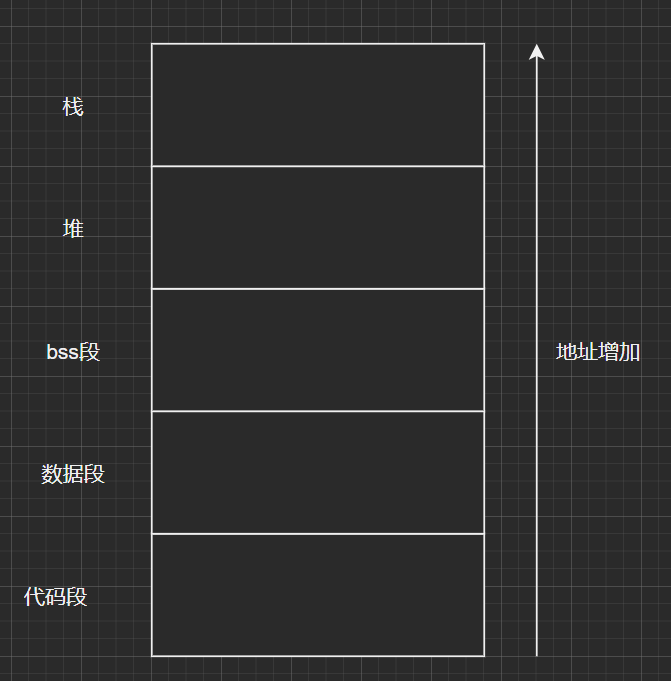
内存分配示意图如下
点击查看本文所在的专辑,STM32F207教程
关注公众号,第一时间收到文章更新。


