
- 1有道词典Android客户端包体积优化之路_resource.arsc优化
- 2uni-app 编译报错 unexpected character
- 3数据质量报告的监控与预警
- 4ChatGPT发展与技术基础_从chatgpt推出
- 5加密水龙头列表新版_sol水龙头
- 6OpenFoam中的Simple系列算法_openfoam 中simple.consistent
- 7硬件结构图_紫光同创PGL22G开发平台试用连载(1)——开发板硬件软件初步评估篇...
- 8Robust Real-time UAV Replanning Using Guided Gradient-based Optimization and Topological Paths_fast planner论文
- 9学习TypeScript21(webpack构建ts+vue3项目)_ts+swc
- 10MATLAB 使用 10 行 代码尝试深度学习_matlab的deep learning toolbox model for alexnet net
DJI Pilot无人机航线规划-实景三维建模全流程
赞
踩
目前很多网上推荐的无人机航线规划软件如Altizure、航测通等难以下载或为商用软件。该文章以大疆精灵4为例演示DJI Pilot航线规划-CC实景建模-三维模型导入Cesiumlab3全流程。
一、软件准备
- 移动端DJI Pilot 用于大疆无人机飞行规划(大疆行业产品都可以免费使用)
- ContextCapture(CC)用于三维建模
- Cesiumlab3 用于载入三维模型
下载方式:
- ContextCapture:https://www.bilibili.com/video/BV16E411u7AF/?spm_id_from=333.337.search-card.all.click&vd_source=779ec680ef14626a10823323282a60a7
- DJI Pilot:手机应用宝等应用软件商店下载
- Cesiumlab3:http://www.cesiumlab.com/
二、DJI Pilot航线规划
1、准备工作
1.1了解测区环境
航拍出发前,了解拍摄地天气情况;
地形和地貌影响无人机成图的质量,对于地面反光强烈的地区,如沙漠、盐滩等,在正午前后不宜摄影。对于陡峭的山区和高密集度的城市地区,为避免阴影,应在当地正午前后进行摄影。规划航线之前,要了解测区地貌,优化航飞方案,提升作业效率,避免撞机事故发生。
1.2 检查无人机
检查机身是否有破损;
安装机翼时,每个机翼都有对应的颜色,然后根据机翼上的图标指示旋转拧紧,飞行前一定要确保机翼是固定好的;
安装好后,无人机和遥控器都开机(短按一下再长按开机);
2、航线规划
2.1创建测绘区域
打开DJI Pilot点击创建航线→创建航线,或者导入KML文件,出现如图所示界面;

创建行航线有以下几种模式,针对不同需求,选择不同模式。本次实验使用倾斜摄影模式构建实景三维地图。
进入主界面后,移动到实验大概区域,点击屏幕生成测绘区域,可以移动边界点更改测区范围;

2.2参数设置
点击右边框自定义影像重叠率,相机角度,飞行高度等参数,一般默认。重叠率参数设置参考下图。建议使用等距拍照,等距拍照的效果要优于等时拍照。

根据所要建模的精度选择对应高度,但一定要在安全高度上飞行。GSD为地面样本距离,如上图,当我们选定高度为80m时,分辨率为3.27cm。下方显示无人机测绘面积、航线时长、航线预计时长,航点、照片数等。
3、执行飞行任务
参数设置完成,点击屏幕左边的“保存”,再点击“调用”,选择执行的航线(有5条,选的条数越多,后期建模精度越高),上传航线后可以点击“开始飞行”执行任务,飞行过程中可以使用地图视图和相机视图进行实时监测。电量低会自动返航及时更换电池。

导出数据作业完成后,整理好无人机装箱,拿出内存卡用读卡器导出影像数据,再进行内业处理。
三、CC实景建模
1.1 创建工程
打开ContextCapture Center Master新建新工程,工程名称需要使用英文,指定工程目录。

1.2添加影像
点击添加相片文件夹。添加影像后,可以更改POS的高程信息(P4R直接获取的POS为大地高)
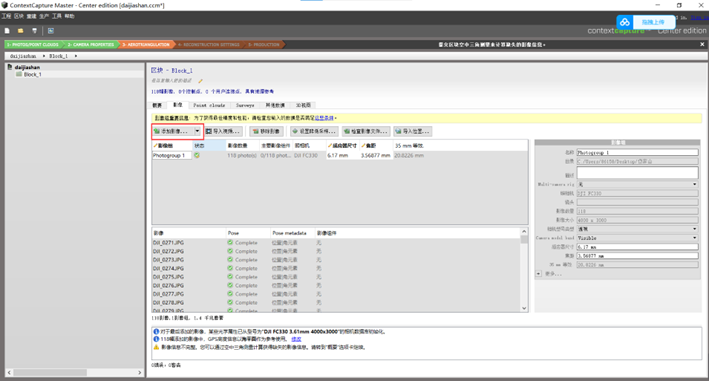
1.3影像设置
为保证建模质量,暂不设置降低采样;
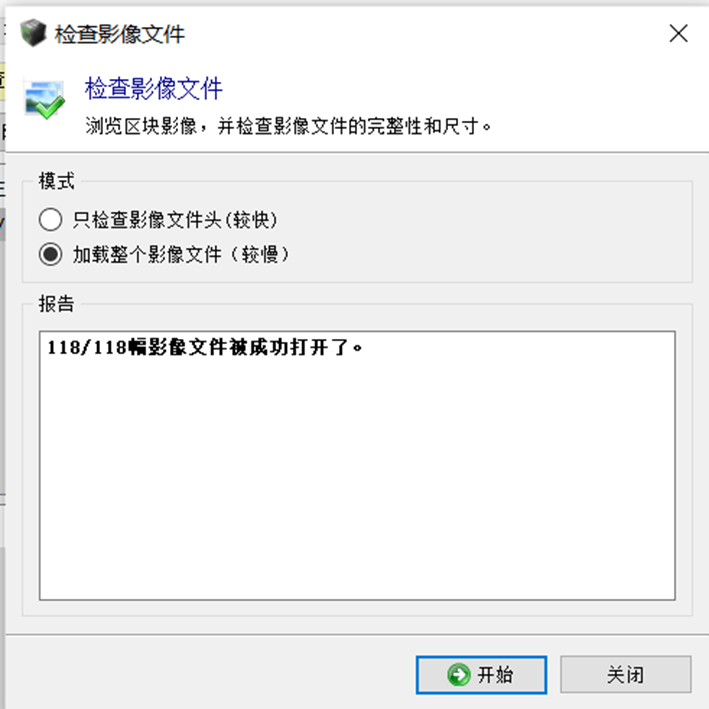
检查影像文件,点击确定,排除有问题的相片;
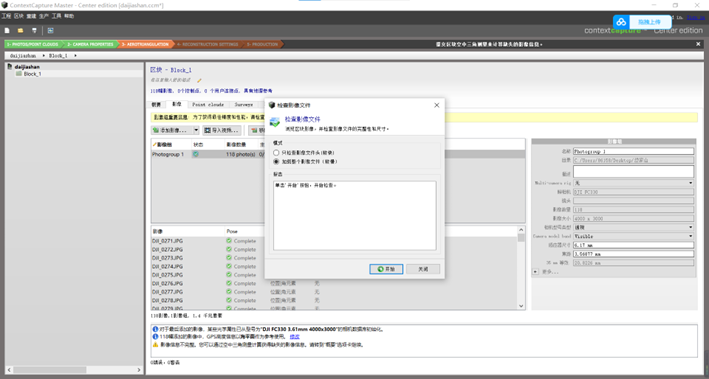
图像通过检查,进行下一步;
1.4提交空中三角测量
点击概要—提交空中三角测量;
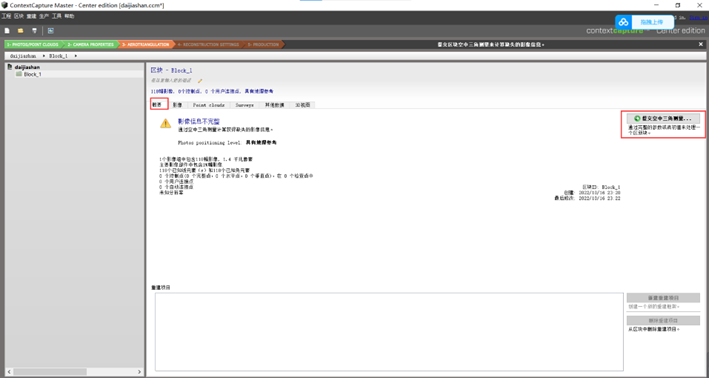
输入区块名称;
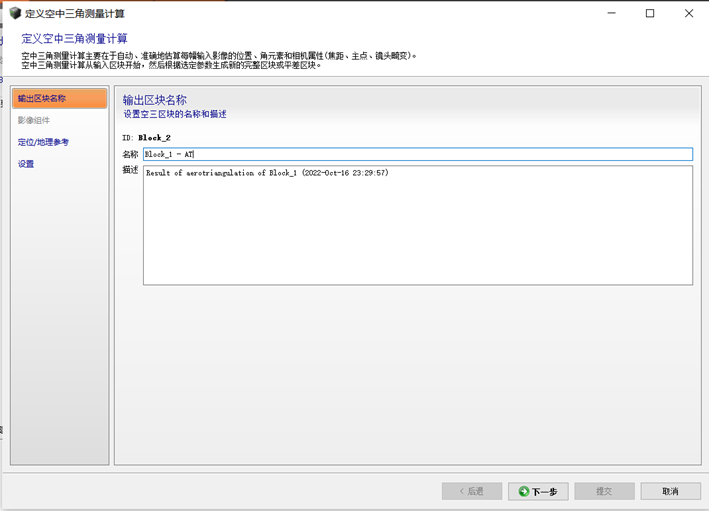
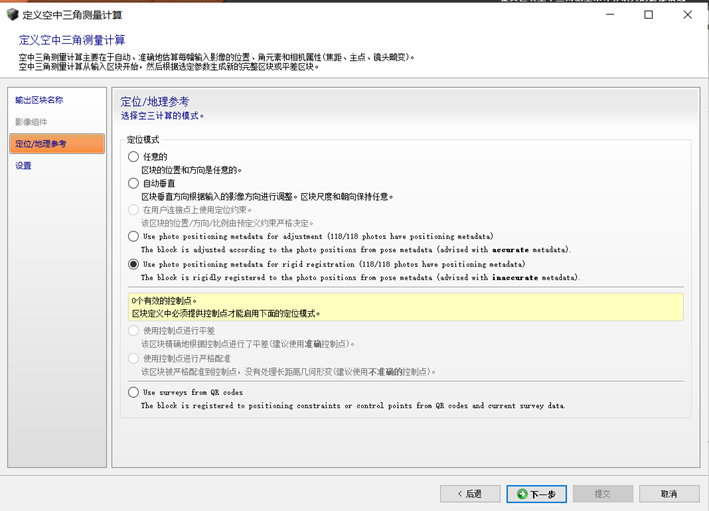
定位/地理参数,没有添加控制点时使用本项;
空三计算设置,一般采用默认设置;

提交进行空三计算(此时需要打开引擎ContextCapture Center Engine);
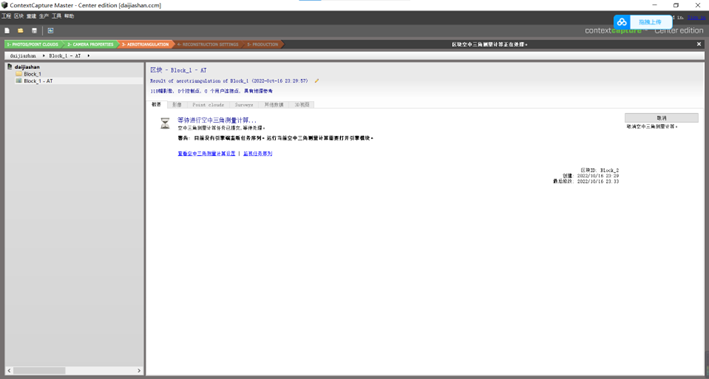
打开ContextCapture Center Engine;
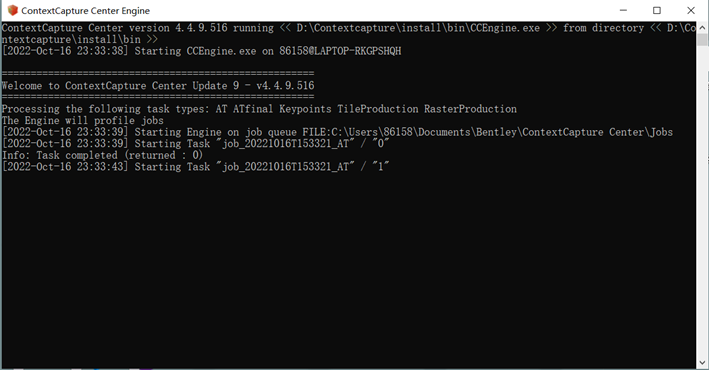
打开后便开始进行空中三角测量计算;
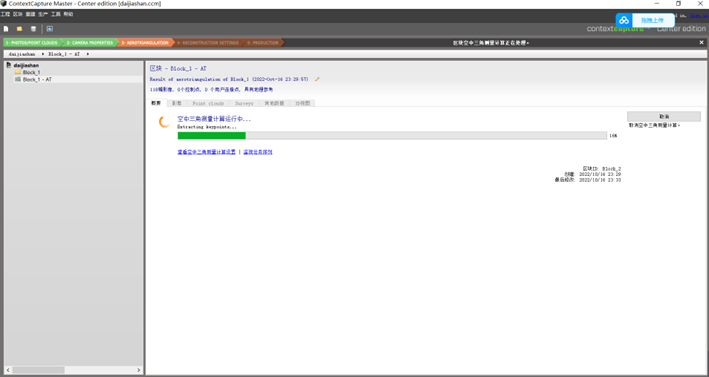
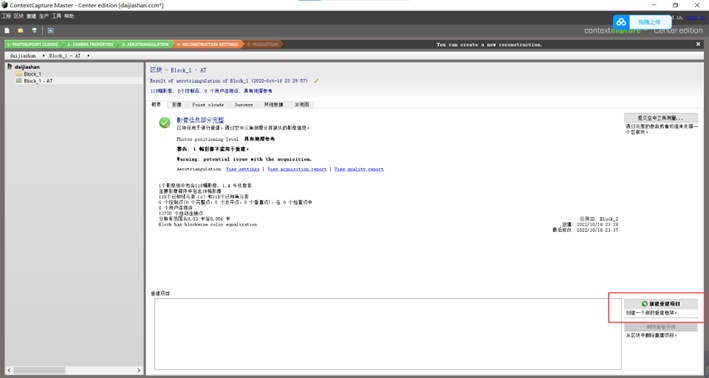
空三计算完成

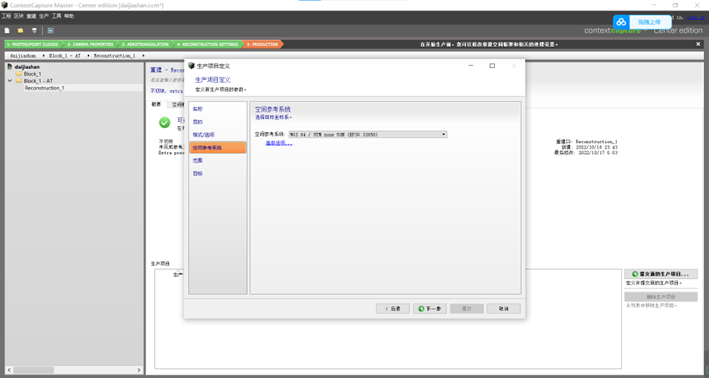
1.5空间框架参数设置
点击新建重建项目,进行空间框架参数的设置;
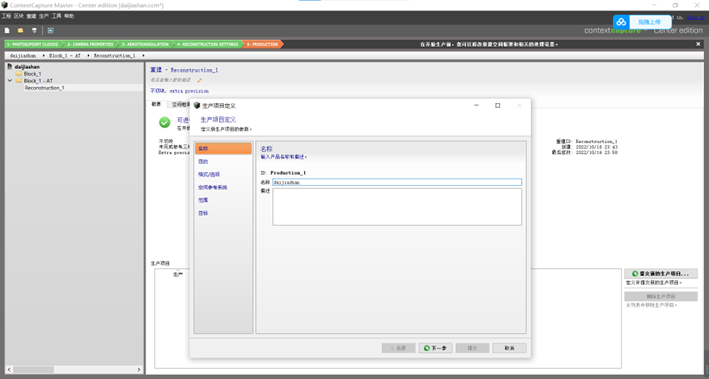
软件内置的切块方式只有矩形,可通过添加KML或dgn文件选择不规则范围,添加时注意空间参考系统。

其它参数设置可以保持默认,返回概要,再次提交新的生产项目,在名称中可以添加描述;
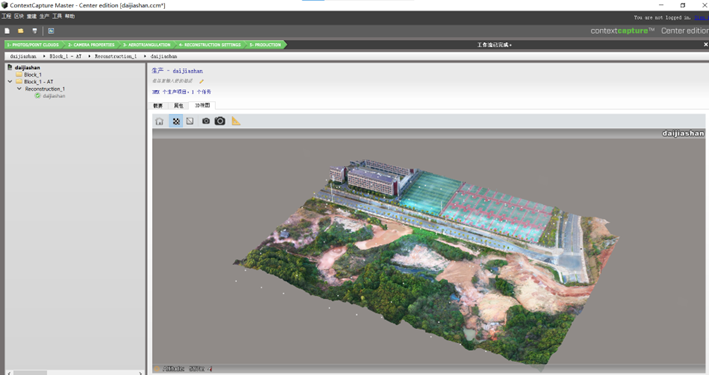
目的选择三角网格
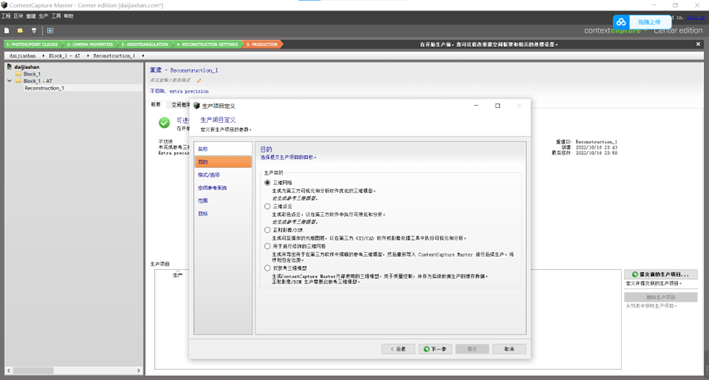
格式/选项可以保持默认选项(若要在cesium上导入3D模型,则格式选择OSBG),空间参考系选择刚刚设置的空间参考,最后在目标中设置项目的输出路径;
等待一段时间,得到的实景3D建模图如下:
四、在cesiumlab3上导入三维模型
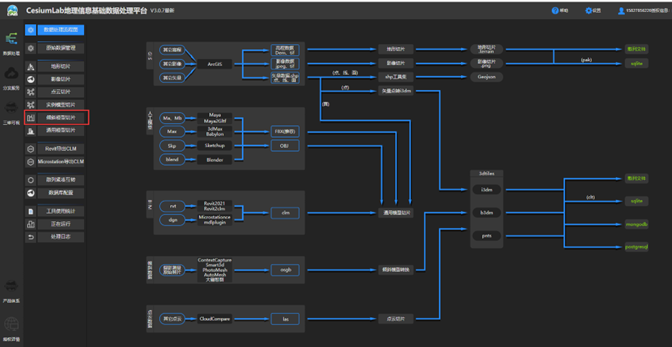
Cesiumlab3是一个专业的地理信息基础数据处理平台, 可以将四大三维数据格式(BIM、3DMax、倾斜摄影数据模型、白模)转成3DTiles,并对三维数据进行高效率的可视化处理。
该平台支持glTF/glb和3D Tiles格式的三维模型,在进行三维可视化前,应将在CC中生成的OSBG格式三维数据转成3DTiles。
2.1 OSGB格式转为3Dtiles
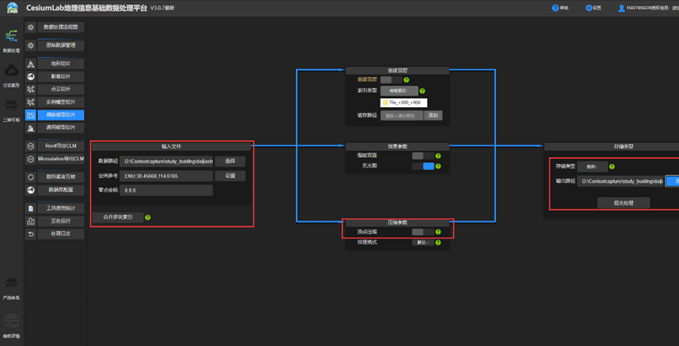
以倾斜摄影的osgb数据转3Dtiles格式为例;在数据处理主页面点击倾斜摄影模型转换;
输入OSGB文件位置,然后会自动读取模型坐标等信息。取消顶点压缩并将存储类型改成散列,最后设置输出的位置,其它选项保持默认,点击提交处理,等待结果即可;
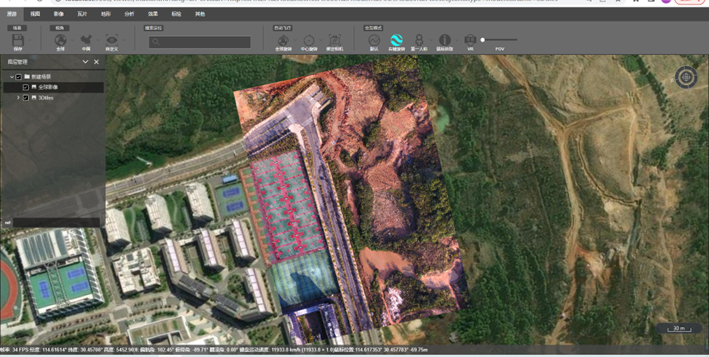
2.2 导入3D模型
点击分发服务,找到刚才生成的3Dtiles文件,在右侧点击预览;
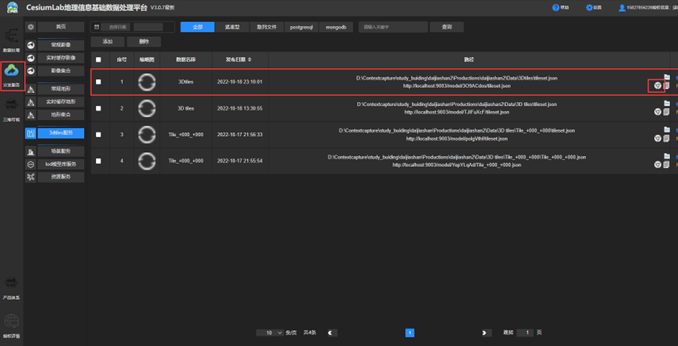
测区的3D模型便显示在平台影像上,可以实现对测区的漫游、分析、标绘等功能;
附录:
1、GSD
GSD(Ground Sampling Distance, GSD)表示数字影像中单个像元对应的地面尺寸,它描述了两个连续像素的中心点之间的距离。
以下为大疆精灵4相机传感器参数:

Sw:真实传感器宽度(mm);
Fr:真实焦距(mm);
H:飞行高度(m);
imW:图像宽度(像素)
Sw=6.17
ImW = 4000
Fr =3.56mm
H(m)=(imW x GSD x Fr)/(Sw x 100)
GSD =H×Sw×100/(imW×Fr)
2. 不同区域像控点选取:
目的:纠正飞行器因定位受限或电磁干扰而产生的位置偏移、坐标精度过低等问题。
①规则矩形和正方形:小面积区域最少布设5个控制点,及航飞区域内4个角各一个,区域中间1个;大面积区域相应的增加控制点
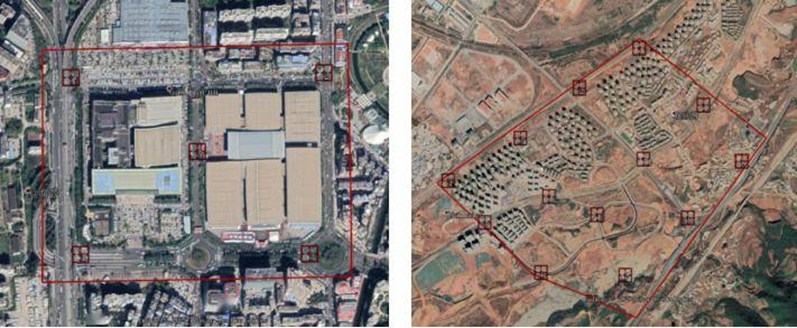
②不规则图形:很多时候我们的飞行区域并不是很规则的图形,这个时候我们就只能根据地形来给它布设控制点了,保证布设的控制点能均匀的覆盖整个测区。
在这里插入图片描述

③带状,河道,公路等区域:这种区域经常采用“Z”字型打法,也就是垂直于带状两边各两个控制点,带状区域中间一个控制点。具体如下图所示。

3、奥维地图在测绘作业中应用的研究
奥维互动地图采用新技术,集多种知名地图与一体,可以辅助完成测绘项目测区范围确定、测绘项目控制点的选点以及控制网图形优化、作业区域作业方式选择和化分、航摄像控测量、地形测量、桩位放样等当前测绘行业的主要任务,为测绘项目实施及管理提供了较为精确的地形地貌资料,
4、Pix4D与Contextcapture之间的比较
Context Capture的三维建模精度比Pix4D更高,Pix4D生成的正射影像精度比Context Capture。Context Capture在模型构建过程中可以对测区进行分块,处理速度更快。由于Pix4D无法分块处理,对电脑配置要求较高。

