
热门标签
热门文章
- 1shp格式详解(一)_shp文件中有成像时间?
- 2iis html文件打开404,c# – 使用HttpModule处理html文件以捕获IIS7上的404错误
- 3pytorch多进程加速及代码优化_pytorch gpu上 for循环多线程加速
- 4BM2 链表内指定区间反转(c++)_c++ 链表内指定区间反转
- 5单服务器TCP百万连接测试的三个限制_tcp连接数限制
- 6最详细 keil5 和 cubeMX安装教程_cubemx keil5
- 7如何换鸿蒙os,鸿蒙OS系统中要怎么实现页面跳转?鸿蒙OS中实现页面跳转方法汇总!-电脑自学网...
- 8后 R-CNN时代, Faster R-CNN、SSD、YOLO 各类变体统治下的目标检测综述:Faster R-CNN系列胜了吗?,(知乎ChenJoya大佬,讲的挺好的,记录一下)_faster rcnn之后
- 9使用IDEA创建一个SSM工程(非maven)_idea不用maven创建ssm工程
- 10Dbeaver,Hudi,Hive,Spark,Presto应用问题及解决措施梳理
当前位置: article > 正文
pytorch一步一步在VGG16上训练自己的数据集_pytorch用vggnet训练自己的图片数据
作者:凡人多烦事01 | 2024-03-11 13:16:18
赞
踩
pytorch用vggnet训练自己的图片数据
准备数据集及加载,ImageFolder
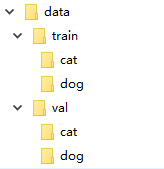
在很多机器学习或者深度学习的任务中,往往我们要提供自己的图片。也就是说我们的数据集不是预先处理好的,像mnist,cifar10等它已经给你处理好了,更多的是原始的图片。比如我们以猫狗分类为例。在data文件下,有两个分别为train和val的文件夹。然后train下是cat和dog两个文件夹,里面存的是自己的图片数据,val文件夹同train。这样我们的数据集就准备好了。
ImageFolder能够以目录名作为标签来对数据集做划分,下面是pytorch中文文档中关于ImageFolder的介绍:

#对训练集做一个变换 train_transforms = transforms.Compose([ transforms.RandomResizedCrop(224), #对图片尺寸做一个缩放切割 transforms.RandomHorizontalFlip(), #水平翻转 transforms.ToTensor(), #转化为张量 transforms.Normalize((.5, .5, .5), (.5, .5, .5)) #进行归一化 ]) #对测试集做变换 val_transforms = transforms.Compose([ transforms.Resize(256), transforms.RandomResizedCrop(224), transforms.ToTensor(), transforms.Normalize((.5, .5, .5), (.5, .5, .5)) ]) train_dir = "G:/data/train" #训练集路径 #定义数据集 train_datasets = datasets.ImageFolder(train_dir, transform=train_transforms) #加载数据集 train_dataloader = torch.utils.data.DataLoader(train_datasets, batch_size=batch_size, shuffle=True) val_dir = "G:/datat/val" val_datasets = datasets.ImageFolder(val_dir, transform=val_transforms) val_dataloader = torch.utils.data.DataLoader(val_datasets, batch_size=batch_size, shuffle=True)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
迁移学习以VGG16为例
下面是迁移代码的实现:
class VGGNet(nn.Module): def __init__(self, num_classes=2): #num_classes,此处为 二分类值为2 super(VGGNet, self).__init__() net = models.vgg16(pretrained=True) #从预训练模型加载VGG16网络参数 net.classifier = nn.Sequential() #将分类层置空,下面将改变我们的分类层 self.features = net #保留VGG16的特征层 self.classifier = nn.Sequential( #定义自己的分类层 nn.Linear(512 * 7 * 7, 512), #512 * 7 * 7不能改变 ,由VGG16网络决定的,第二个参数为神经元个数可以微调 nn.ReLU(True), nn.Dropout(), nn.Linear(512, 128), nn.ReLU(True), nn.Dropout(), nn.Linear(128, num_classes), ) def forward(self, x): x = self.features(x) x = x.view(x.size(0), -1) x = self.classifier(x) return x
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
完整代码如下
from __future__ import print_function, division import torch import torch.nn as nn import torch.nn.functional as F import torch.optim as optim from torchvision import datasets, transforms from torch.autograd import Variable import numpy as np from torchvision import models batch_size = 16 learning_rate = 0.0002 epoch = 10 train_transforms = transforms.Compose([ transforms.RandomResizedCrop(224), transforms.RandomHorizontalFlip(), transforms.ToTensor(), transforms.Normalize((.5, .5, .5), (.5, .5, .5)) ]) val_transforms = transforms.Compose([ transforms.Resize(256), transforms.RandomResizedCrop(224), transforms.ToTensor(), transforms.Normalize((.5, .5, .5), (.5, .5, .5)) ]) train_dir = './VGGDataSet/train' train_datasets = datasets.ImageFolder(train_dir, transform=train_transforms) train_dataloader = torch.utils.data.DataLoader(train_datasets, batch_size=batch_size, shuffle=True) val_dir = './VGGDataSet/val' val_datasets = datasets.ImageFolder(val_dir, transform=val_transforms) val_dataloader = torch.utils.data.DataLoader(val_datasets, batch_size=batch_size, shuffle=True) class VGGNet(nn.Module): def __init__(self, num_classes=3): super(VGGNet, self).__init__() net = models.vgg16(pretrained=True) net.classifier = nn.Sequential() self.features = net self.classifier = nn.Sequential( nn.Linear(512 * 7 * 7, 512), nn.ReLU(True), nn.Dropout(), nn.Linear(512, 128), nn.ReLU(True), nn.Dropout(), nn.Linear(128, num_classes), ) def forward(self, x): x = self.features(x) x = x.view(x.size(0), -1) x = self.classifier(x) return x #--------------------训练过程--------------------------------- model = VGGNet() if torch.cuda.is_available(): model.cuda() params = [{'params': md.parameters()} for md in model.children() if md in [model.classifier]] optimizer = optim.Adam(model.parameters(), lr=learning_rate) loss_func = nn.CrossEntropyLoss() Loss_list = [] Accuracy_list = [] for epoch in range(100): print('epoch {}'.format(epoch + 1)) # training----------------------------- train_loss = 0. train_acc = 0. for batch_x, batch_y in train_dataloader: batch_x, batch_y = Variable(batch_x).cuda(), Variable(batch_y).cuda() out = model(batch_x) loss = loss_func(out, batch_y) train_loss += loss.data[0] pred = torch.max(out, 1)[1] train_correct = (pred == batch_y).sum() train_acc += train_correct.data[0] optimizer.zero_grad() loss.backward() optimizer.step() print('Train Loss: {:.6f}, Acc: {:.6f}'.format(train_loss / (len( train_datasets)), train_acc / (len(train_datasets)))) # evaluation-------------------------------- model.eval() eval_loss = 0. eval_acc = 0. for batch_x, batch_y in val_dataloader: batch_x, batch_y = Variable(batch_x, volatile=True).cuda(), Variable(batch_y, volatile=True).cuda() out = model(batch_x) loss = loss_func(out, batch_y) eval_loss += loss.data[0] pred = torch.max(out, 1)[1] num_correct = (pred == batch_y).sum() eval_acc += num_correct.data[0] print('Test Loss: {:.6f}, Acc: {:.6f}'.format(eval_loss / (len( val_datasets)), eval_acc / (len(val_datasets)))) Loss_list.append(eval_loss / (len(val_datasets))) Accuracy_list.append(100 * eval_acc / (len(val_datasets))) x1 = range(0, 100) x2 = range(0, 100) y1 = Accuracy_list y2 = Loss_list plt.subplot(2, 1, 1) plt.plot(x1, y1, 'o-') plt.title('Test accuracy vs. epoches') plt.ylabel('Test accuracy') plt.subplot(2, 1, 2) plt.plot(x2, y2, '.-') plt.xlabel('Test loss vs. epoches') plt.ylabel('Test loss') plt.show() # plt.savefig("accuracy_loss.jpg")
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/219270
推荐阅读
相关标签

