
热门标签
当前位置: article > 正文
Opencv_10 图像的透视变换_cv透视变换 图像空白部分
作者:小小林熬夜学编程 | 2024-02-27 14:08:10
赞
踩
cv透视变换 图像空白部分
一. 透视变换的原理
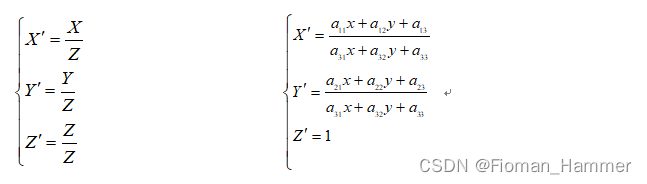
透视变换(Perspective Transformation)是将图片投影到一个新的视平面(Viewing Plance),也称为投影映射(Projective Mapping).通用的变换公式为:

透视变换矩阵

(x,y,1)是原点, [X,Y,Z]是变换后的点位
这是一个二维空间变换到三维空间的转换,因为图像在二维平面,故除以Z

二. 透视变换实现
① 函数原型
Mat getPerspectiveTransform(const Point2f src[], const Point2f dst[],
int solveMethod = DECOMP_LU);
- 1
- 2
参数说明:
src[]:原图像中的四个像素坐标dst[]:目标图像中的四个像素点坐标solveMethod:选择计算透视变换矩阵方法的标志,可以选择参数以及含义在下表中
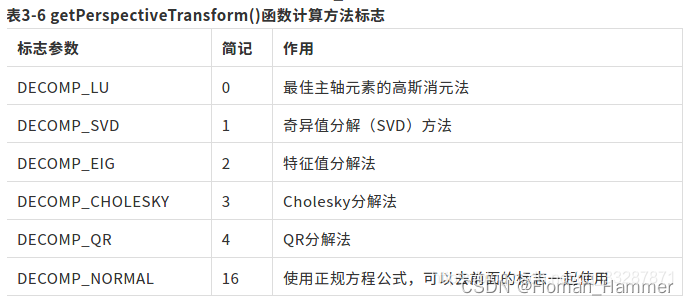
该函数两个输入量都是存放浮点坐标的数组,在生成数组的时候像素点的输入顺序没有要求,但是需要注意像素点的对应关系是一一对应的,函数的返回值是一个3*3的矩阵.最后一个参数是对应点坐标计算透视变换矩阵方法的选择标志,默认使用的是最佳主轴元素的高斯消元法DECOMP_LU
获取到透视变换矩阵以后,就可以进行透视变换了
void warpPerspective( InputArray src, OutputArray dst,
InputArray M, Size dsize,
int flags = INTER_LINEAR,
int borderMode = BORDER_CONSTANT,
const Scalar& borderValue = Scalar());
- 1
- 2
- 3
- 4
- 5
参数说明:
src:输入图像dst:输出图像M:3*3的变换矩阵dSize:输出图像的尺寸flags:插值方法标志boardMode:像素边界填充方式的标志boardValue:填充边界使用的数值,默认情况下是0
② 透视变换实现
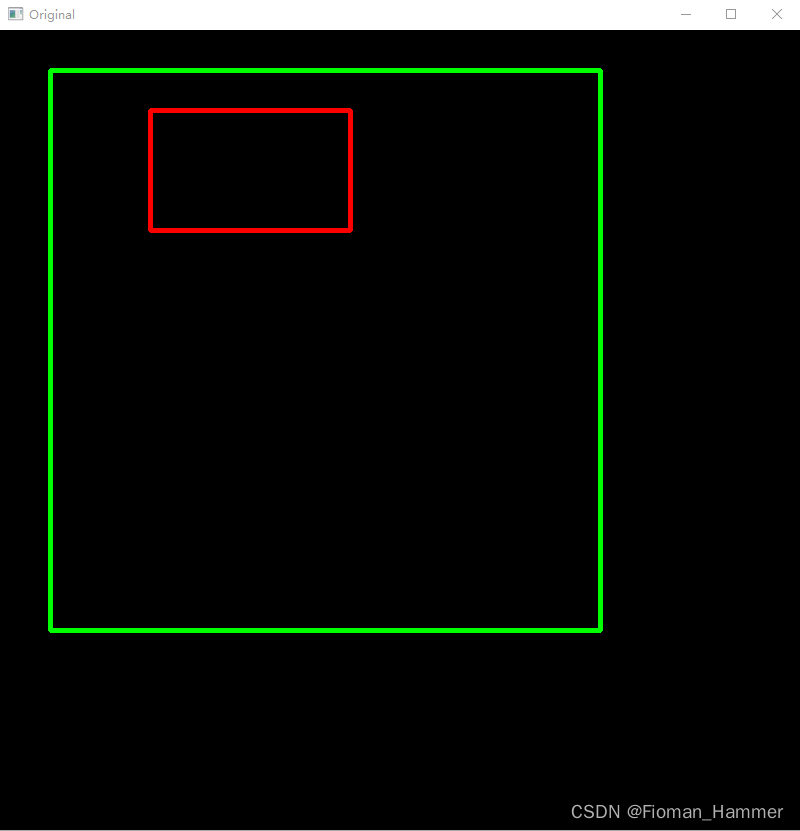
#include"MyOpencv.h" #include <vector> int main(void) { Mat imageSrc = Mat::zeros(Size(800, 800), CV_8UC3); // 画一个多边形 vector<Point> pts; pts.push_back(Point(50, 40)); pts.push_back(Point(600, 40)); pts.push_back(Point(600, 600)); pts.push_back(Point(50, 600)); polylines(imageSrc, pts, true, Scalar(0, 255, 0), 3, LINE_8); pts.clear(); pts.push_back(Point(150, 80)); pts.push_back(Point(350, 80)); pts.push_back(Point(350, 200)); pts.push_back(Point(150, 200)); polylines(imageSrc, pts, true, Scalar(0, 0, 255), 3, LINE_8); Point2f srcPoint[4]; Point2f dstPoint[4]; srcPoint[0] = Point2f(150, 80); srcPoint[1] = Point2f(350, 80); srcPoint[2] = Point2f(350, 200); srcPoint[3] = Point2f(150, 200); dstPoint[0] = Point2f(150, 80); dstPoint[1] = Point2f(350, 80); dstPoint[2] = Point2f(400, 200); dstPoint[3] = Point2f(200, 200); Mat M = getPerspectiveTransform(srcPoint, dstPoint); Mat dst; warpPerspective(imageSrc, dst, M, Size(1000, 1000)); imshow("Original", imageSrc); imshow("Dst", dst); waitKey(0); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
结果:

三. 透视变换的案例

将这张图像摆正.用到的技术.
- 灰度处理,二值化,形态学操作行程连通域
- 轮廓发现,将目标的轮廓绘制出来
- 在绘制的轮廓中进行直线检测
- 找出4个边,求出四个交点
- 使用透视变换函数,得到结果
#include "MyOpencv.h" #include <vector> int main(void) { Mat imageSrc = imread("./test_01.png", IMREAD_GRAYSCALE); imshow("Original", imageSrc); // 二值化 Mat binary; threshold(imageSrc, binary, 0, 255, THRESH_BINARY | THRESH_OTSU); imshow("Binary", binary); // 形态学 开操作,可以填充白色小区域 Mat morphImage; Mat kernel = getStructuringElement(MORPH_RECT, Size(5, 5), Point(-1, -1)); morphologyEx(binary, morphImage, MORPH_OPEN, kernel, Point(-1, -1), 3); imshow("Opened", morphImage); // 查找轮廓 vector<vector<Point>> contours; vector<Vec4i> hireachy; findContours(morphImage, contours, hireachy, RETR_LIST, CHAIN_APPROX_SIMPLE); cout << "Contours.size: " << contours.size() << endl; // 轮廓绘制 int width = imageSrc.cols; int height = imageSrc.rows; Mat drawImage = Mat::zeros(imageSrc.size(), CV_8UC3); for (int index = 0; index < contours.size(); index++) { Rect rect = boundingRect(contours[index]); if (rect.width > width / 2 && rect.height > height / 2 && rect.width < width - 5 && rect.height < height - 5) { drawContours(drawImage, contours, index, Scalar(0, 0, 255), 2, 8, hireachy, 0, Point(0, 0)); } } imshow("Contours", drawImage); // 直线检测 vector<Vec4i> lines; Mat contoursImage; int accu = static_cast<int>(min(width * 0.3, height * 0.3)); cvtColor(drawImage, contoursImage, COLOR_BGR2GRAY); imshow("Contours", contoursImage); Mat linesImage = Mat::zeros(imageSrc.size(), CV_8UC3); HoughLinesP(contoursImage, lines, 1, CV_PI / 180.0,150,accu,accu); for (int index = 0; index < lines.size(); index++) { Vec4i ln = lines[index]; line(linesImage, Point(ln[0], ln[1]), Point(ln[2], ln[3]), Scalar(0, 0, 255), 2, 8, 0); } cout << "Number of lines: " << lines.size() << endl; imshow("ImageLines",linesImage); // 先确定上下左右四条直线,然后求交点 Vec4i topLine, bottomLine, leftLine, rightLine; int yOffset; int xOffset; for (int i = 0; i < lines.size(); i++) { Vec4i line = lines[i]; yOffset = abs(line[3] - line[1]); xOffset = abs(line[0] - line[2]); // topLine and bottomLine if (yOffset < height * 0.2 ) { if (line[1] < height / 2 && line[3] < height / 2) { topLine = lines[i]; } else { bottomLine = lines[i]; } } // leftLine and rightLine if (xOffset < width * 0.2) { if (line[0] < width / 2 && line[1] < width / 2) { leftLine = lines[i]; } else { rightLine = lines[i]; } } } cout << "topLine : p1(x,y)= " << topLine[0] << "," << topLine[1] << "; p2(x,y)= " << topLine[2] << "," << topLine[3] << endl; cout << "bottomLine : p1(x,y)= " << bottomLine[0] << "," << bottomLine[1] << "; p2(x,y)= " << bottomLine[2] << "," << bottomLine[3] << endl; cout << "leftLine : p1(x,y)= " << leftLine[0] << "," << leftLine[1] << "; p2(x,y)= " << leftLine[2] << "," << leftLine[3] << endl; cout << "rightLine : p1(x,y)= " << rightLine[0] << "," << rightLine[1] << "; p2(x,y)= " << rightLine[2] << "," << rightLine[3] << endl; // 获取两条直线的交点 Point leftTop, rightTop, rightBottom, leftBottom; float leftLineK, leftLineB, topLineK, topLineB, rightLineK, rightLineB, bottomLineK, bottomLineB; leftLineK = float(leftLine[3] - leftLine[1]) / float(leftLine[2] - leftLine[0]); leftLineB = leftLine[1] - leftLineK * leftLine[0]; rightLineK = float(rightLine[3] - rightLine[1]) / float(rightLine[2] - rightLine[0]); rightLineB = rightLine[1] - rightLineK * rightLine[0]; topLineK = float(topLine[3] - topLine[1]) / float(topLine[2] - topLine[0]); topLineB = topLine[1] - topLineK * topLine[0]; bottomLineK = float(bottomLine[3] - bottomLine[1]) / float(bottomLine[2] - bottomLine[0]); bottomLineB = bottomLine[1] - bottomLineK * bottomLine[0]; cout << "leftLineK = " << leftLineK << ", leftLineB = " << leftLineB << endl; cout << "rightLineK = " << rightLineK << ", rightLineB = " << rightLineB << endl; cout << "topLineK = " << topLineK << ", topLineB = " << topLineB << endl; cout << "bottomLineK = " << bottomLineK << ", bottomLineB = " << bottomLineB << endl; // 获取交点 Point p1; p1.x = -static_cast<int>((leftLineB - topLineB) / (leftLineK - topLineK)); p1.y = static_cast<int>(leftLineK * p1.x + leftLineB); Point p2; p2.x = -static_cast<int>((topLineB - rightLineB) / (topLineK - rightLineK)); p2.y = static_cast<int>(topLineK * p2.x + topLineB); Point p3; p3.x = -static_cast<int>((rightLineB - bottomLineB) / (rightLineK - bottomLineK)); p3.y = static_cast<int>(rightLineK * p3.x + rightLineB); Point p4; p4.x = -static_cast<int>((bottomLineB - leftLineB) / (bottomLineK - leftLineK)); p4.y = static_cast<int>(bottomLineK * p4.x + bottomLineB); cout << "Point p1: (" << p1.x << "," << p1.y << ")" << endl; cout << "Point p2: (" << p2.x << "," << p2.y << ")" << endl; cout << "Point p3: (" << p3.x << "," << p3.y << ")" << endl; cout << "Point p4: (" << p4.x << "," << p4.y << ")" << endl; // 获取两点之间的距离' int newWidth, newHeight; newWidth = sqrt((p1.x - p2.x) * (p1.x - p2.x) + (p1.y - p2.y) * (p1.y - p2.y)); newHeight = sqrt((p1.x - p4.x) * (p1.x - p4.x) + (p1.y - p4.y) * (p1.y - p4.y)); cout << "newWidth = " << newWidth << ", newHeight = " << newHeight << endl; // 透视变换 Point2f srcPts[4]; Point2f dstPts[4]; srcPts[0] = p1; srcPts[1] = p2; srcPts[2] = p3; srcPts[3] = p4; dstPts[0] = Point(0, 0); dstPts[1] = Point(newWidth, 0); dstPts[2] = Point(newWidth, newHeight); dstPts[3] = Point(0, newHeight); Mat M = getPerspectiveTransform(srcPts, dstPts, 0); Mat dst; warpPerspective(imageSrc, dst, M, Size(newWidth+5, newHeight+5), INTER_LINEAR); imshow("Dst", dst); waitKey(0); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
结果:

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/153538?site
推荐阅读

相关标签

