
热门标签
热门文章
- 1如何通过LAC(TAC)和CID进行手机定位_lac和cellid如何定位
- 2使用 pip 安装serial 串口通讯模块_pip serial
- 3PyTorch深度学习实战(37)——CycleGAN详解与实现_pytorch使用cyclegan
- 4虚拟机建立FTP服务_在虚拟机或者云服务上搭建ftp服务,使用另一个终端来进行登录
- 5【计算机网络笔记】计算机网络性能(2)——时延带宽积、丢包率、吞吐量/率_100g 吞吐量、时延、过载丢包率
- 6华为OD机试Golang解题 - 事件推送 | 含思路_华为机考事件推送
- 7Anaconda创建虚拟环境及离线迁移至生产服务器_anaconda3离线添加新虚拟环境
- 8低代码开发如何助力数字化企业管理系统平台构建
- 9CentOS7下配置java环境及安装tomcat9_/usr/local/tomcat9/bin/catalina.sh:行464: /usr/java
- 10微信小程序添加npm模块_packnpmrelationlist
当前位置: article > 正文
python识别图形形状_python图形判断
作者:小小林熬夜学编程 | 2024-02-27 23:11:06
赞
踩
python图形判断
代码
import cv2 import numpy as np """ 查找图像轮廓,计算图像矩,根据公式计算轮廓周长和面积 面积:cv2.contourArea()|M['m00'] 周长:cv2.arcLength() 有两类边界矩形,直边界矩形,旋转边界矩形。 直边界矩形(就是没有旋转的矩形),使用函数cv2.boundingRect()可以查找到, 因为直边界矩形不考虑矩形旋转,所以直边界矩形的面积不是最小。 旋转矩形,这个矩形的面积最小,因为他考虑了矩形的旋转。 使用函数cv2.minAreaRect可以得到,函数返回一个Box2D结构, 其中包含旋转矩形左上角坐标(x, y),矩形的宽高(w, h),以及旋转角度。 但是绘制一个矩形需要四个角点,可以通过函数cv2.boxPoints()获得。 approxPolyDP(curve, epsilon, closed[, approxCurve]) -> approxCurve 第二个参数epsilon:指定原始轮廓到近似轮廓的最大距离,函数返回拟合的多边形边数。 """ def stackImages(scale, imgArray): rows = len(imgArray) cols = len(imgArray[0]) rowsAvailable = isinstance(imgArray[0], list) width = imgArray[0][0].shape[1] height = imgArray[0][0].shape[0] if rowsAvailable: for x in range(0, rows): for y in range(0, cols): if imgArray[x][y].shape[:2] == imgArray[0][0].shape[:2]: imgArray[x][y] = cv2.resize(imgArray[x][y], (0, 0), None, scale, scale) else: imgArray[x][y] = cv2.resize(imgArray[x][y], (imgArray[0][0].shape[1], imgArray[0][0].shape[0]), None, scale, scale) if len(imgArray[x][y].shape) == 2: imgArray[x][y] = cv2.cvtColor(imgArray[x][y], cv2.COLOR_GRAY2BGR) imageBlank = np.zeros((height, width, 3), np.uint8) hor = [imageBlank] * rows hor_con = [imageBlank] * rows for x in range(0, rows): hor[x] = np.hstack(imgArray[x]) ver = np.vstack(hor) else: for x in range(0, rows): if imgArray[x].shape[:2] == imgArray[0].shape[:2]: imgArray[x] = cv2.resize(imgArray[x], (0, 0), None, scale, scale) else: imgArray[x] = cv2.resize(imgArray[x], (imgArray[0].shape[1], imgArray[0].shape[0]), None, scale, scale) if len(imgArray[x].shape) == 2: imgArray[x] = cv2.cvtColor(imgArray[x], cv2.COLOR_GRAY2BGR) hor = np.hstack(imgArray) ver = hor return ver def getContours(img): # 查找轮廓,cv2.RETR_ExTERNAL=获取外部轮廓点, CHAIN_APPROX_NONE = 得到所有的像素点 contours, hierarchy = cv2.findContours(img, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE) # 循环轮廓,判断每一个形状 for cnt in contours: # 获取轮廓面积 area = cv2.contourArea(cnt) print(area) # 当面积大于500,代表有形状存在 if area > 500: # 绘制所有的轮廓并显示出来 cv2.drawContours(imgContour, cnt, -1, (255, 0, 0), 3) # 计算所有轮廓的周长,便于做多边形拟合 peri = cv2.arcLength(cnt, True) # 多边形拟合,获取每个形状的 边 approx = cv2.approxPolyDP(cnt, 0.02 * peri, True) print(len(approx)) objCor = len(approx) # 获取每个形状的x,y,w,h x, y, w, h = cv2.boundingRect(approx) # 计算出边界后,即边数代表形状,如三角形边数=3 if objCor == 3: objectType = "Tri" elif objCor == 4: # 判断是矩形还是正方形 aspRatio = w / float(h) if aspRatio > 0.98 and aspRatio < 1.03: objectType = "Square" else: objectType = "Rectangle" # 大于4个边的就是圆形 elif objCor > 4: objectType = "Circles" else: objectType = "None" # 绘制文本时需要绘制在图形附件 cv2.rectangle(imgContour, (x, y), (x + w, y + h), (0, 255, 0), 2) cv2.putText(imgContour, objectType, (x + (w // 2) - 10, y + (h // 2) - 10), cv2.FONT_HERSHEY_COMPLEX, 0.7, (0, 0, 0), 2) path = 'Resources/shapes.png' img = cv2.imread(path) imgContour = img.copy() # 灰度化 imgGray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) # 高斯平滑 imgBlur = cv2.GaussianBlur(imgGray, (7, 7), 1) # 边缘检测 imgCanny = cv2.Canny(imgBlur, 50, 50) # 获取轮廓特征点 getContours(imgCanny) imgBlank = np.zeros_like(img) imgStack = stackImages(0.6, ([img, imgGray, imgBlur], [imgCanny, imgContour, imgBlank])) cv2.imshow("Stack", imgStack) cv2.waitKey(0)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
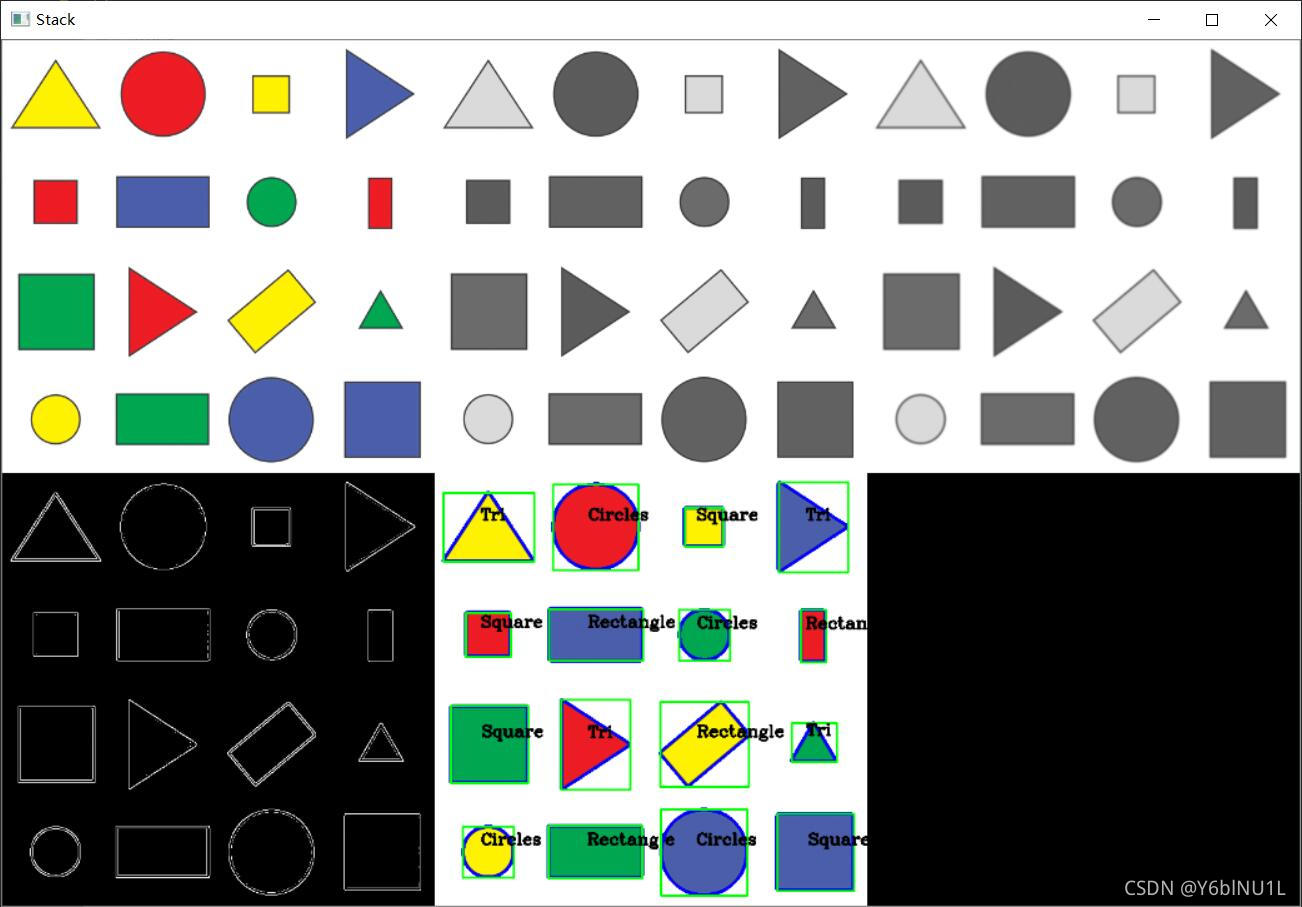
效果图
原图链接:
百度网盘链接: https://pan.baidu.com/s/1rTqz1hr0BY2u7Qmjw66VDQ 提取码:j34c
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/156424?site
推荐阅读
相关标签

