
- 1windows下修改PyCharm默认terminal & 在Git Bash中使用conda_pycharm的terminal默认环境
- 2Grad-CAM简介_gradcam
- 3一分钟解决你的公有云私有云选择困难症_使用公有云场景
- 4python——第三方库之 “jieba” 库_python jieba库作用
- 5BP 神经网络算法原理_bp神经网络原理csdn
- 6uniapp 调用安卓原生插件 安卓原生又调用了第三方sdk(第三方原生开发的aar怎么转成uni可以使用的aar)_uniapp调用第三方sdk
- 7Internet Download Manager中文破解版v6.42.3绿色版_internet download manager 6.42.3
- 8编写程序,读取1-100之间的整数,然后计算每个数出现的次数,设定输入0表示结束。_编写程序,读取1到100之间的整数,然后计算每个数出现的次数。假定输人0表示结束
- 9(day9) 自学Java——常用API_java中jdk apl如何练习
- 10怎样在android中使用超链接
深度学习pytorch——卷积神经网络(持续更新)
赞
踩
计算机如何解析图片?
在计算机的眼中,一张灰度图片,就是许多个数字组成的二维矩阵,每个数字就是此点的像素值(图-1)。在存储时,像素值通常位于[0, 255]区间,在深度学习中,像素值通常位于[0, 1]区间。

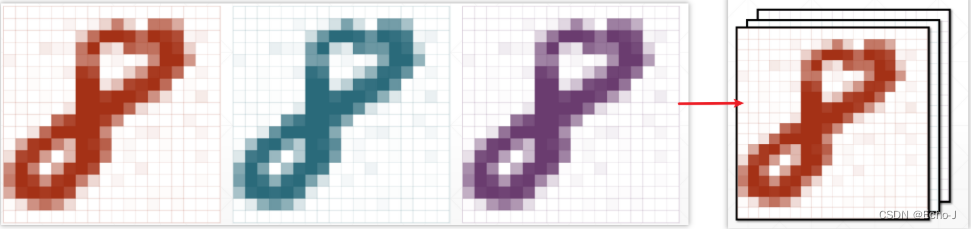
一张彩色图片,是使用三张图片叠加而成,即RGB(red green blue)(图-2)。
什么是卷积?
标准的神经网络是全连接的方式,全连接会获取更多的信息,但同时也包含着巨大的算力需求。在以前,算力完全不足以支撑如此巨大的计算量,但是又要进行处理,因此当时的人们联想到了人类观察事物的过程,即结合人眼观察事物的角度——先观察吸引我们的点,忽略不吸引我们的点,这称为局部相关性(Receptive Field)。应用到神经网络中,就出现了卷积的概念。
卷积操作就是先仅仅观察一部分,然后移动视野观察下一部分,这就称为卷积操作(图-3)。
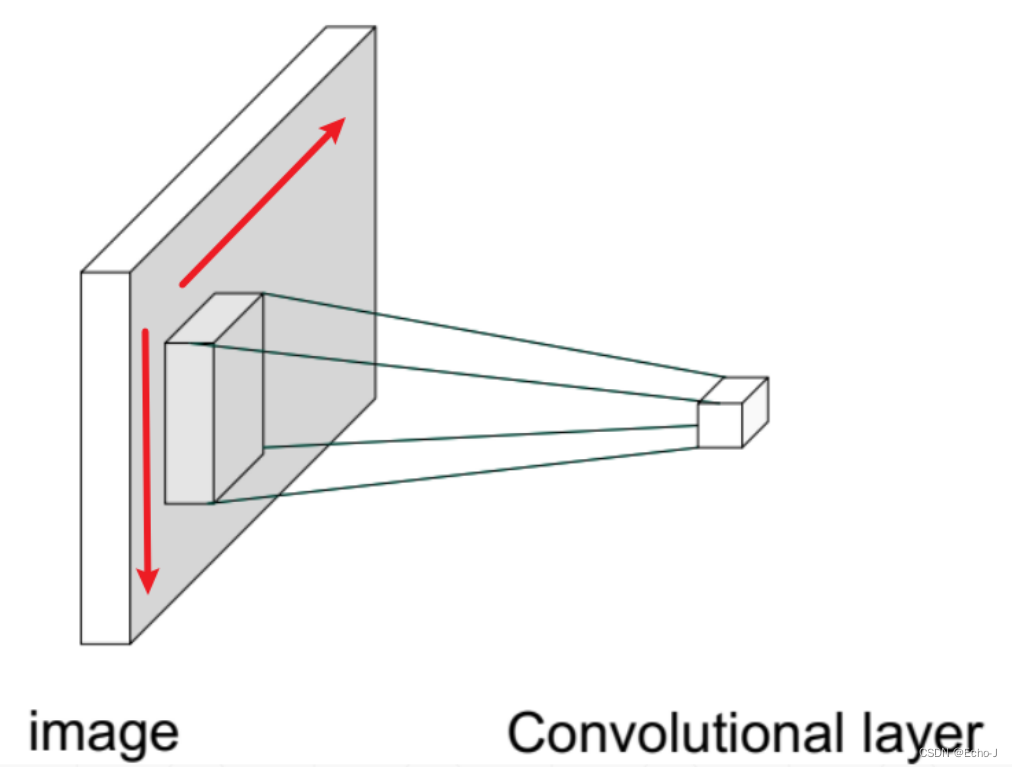
表现在神经网络中就相当于只连接局部相关性的属性(假设红色的线都是相关的,其它的都断开,当然红色的线都是我自己瞎画的),如图-4所示:

表现在实例上就是图-5的情况:

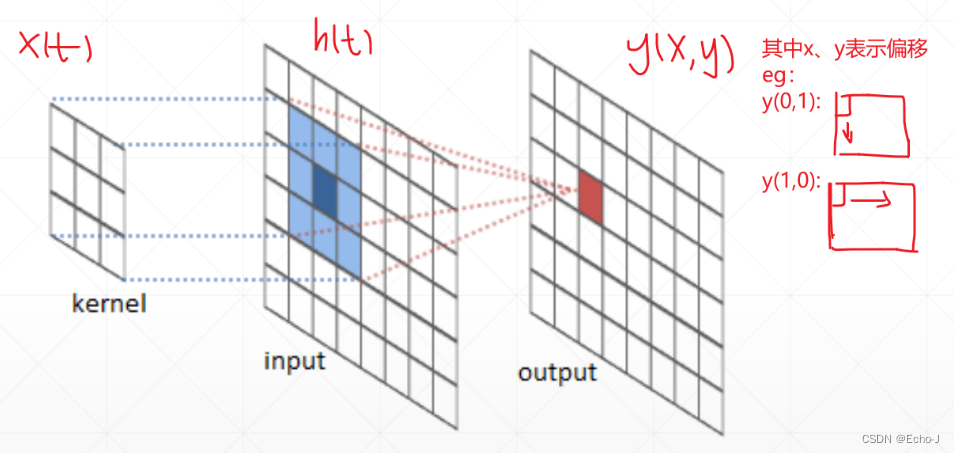
卷积的数学表示:设x(t)为输入的数据,h(t)为遍历使用的矩阵,y(t)为经过卷积计算得到的矩阵,将x(t)和h(t)进行点乘运算,将每次点成的结果进行累加得到y(t)对应元素的值(公式-1)。

宏观效果(图-6):
实例
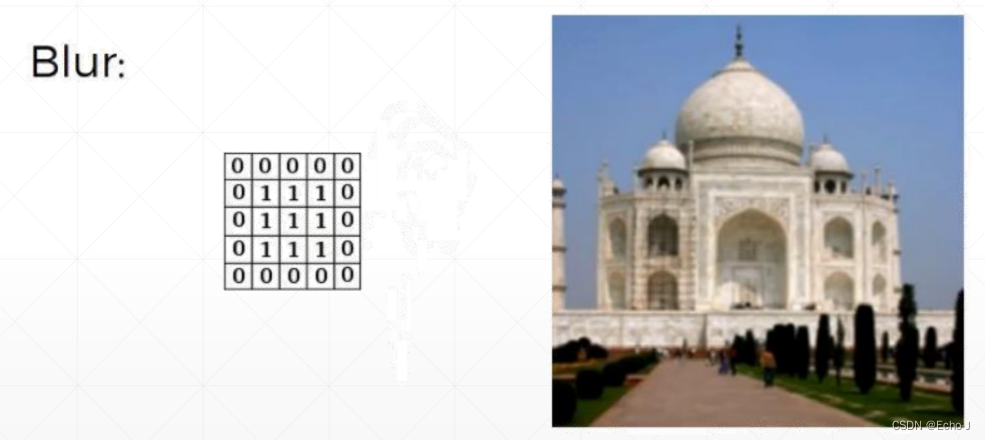
以不同的 h(t) 进行卷积操作,会获取到不同的特征:
锐化(图-7):

模糊处理(图-8):
边缘检测(图-9):

卷积神经网络
图-3 是以1个Kernel_channel进行卷积运算。以多个Kernel_channels进行卷积运算(图-10):
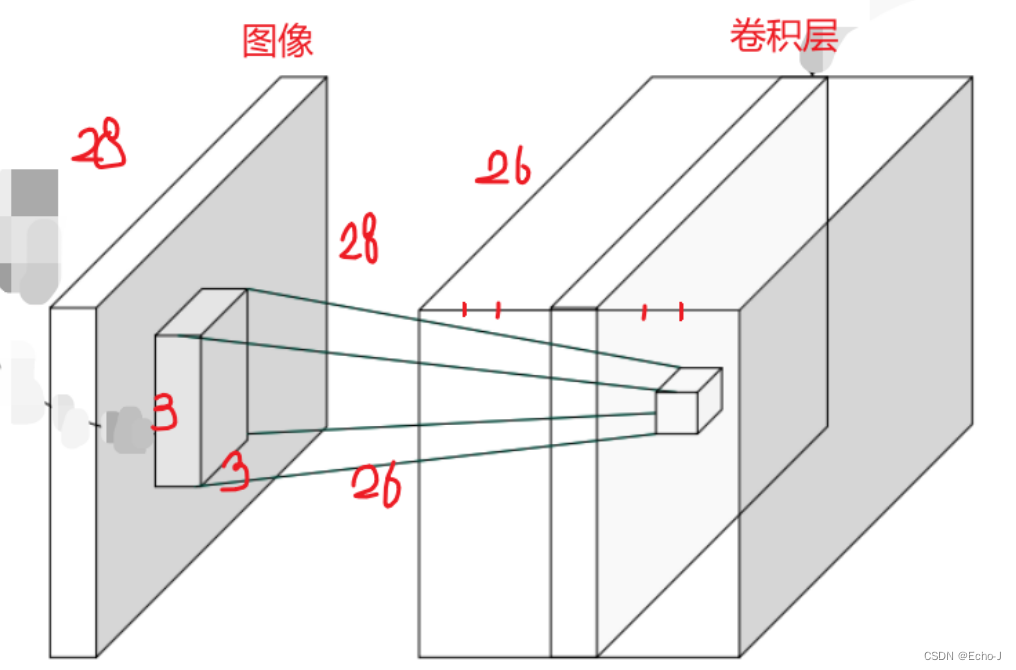
假设原来的图像是一个28*28的灰度图像,即[1, 28, 28]。使用3*3的特征矩阵以7个角度来观察这副图像,最后得到的卷积层是[7, 26, 26]。
称呼声明:
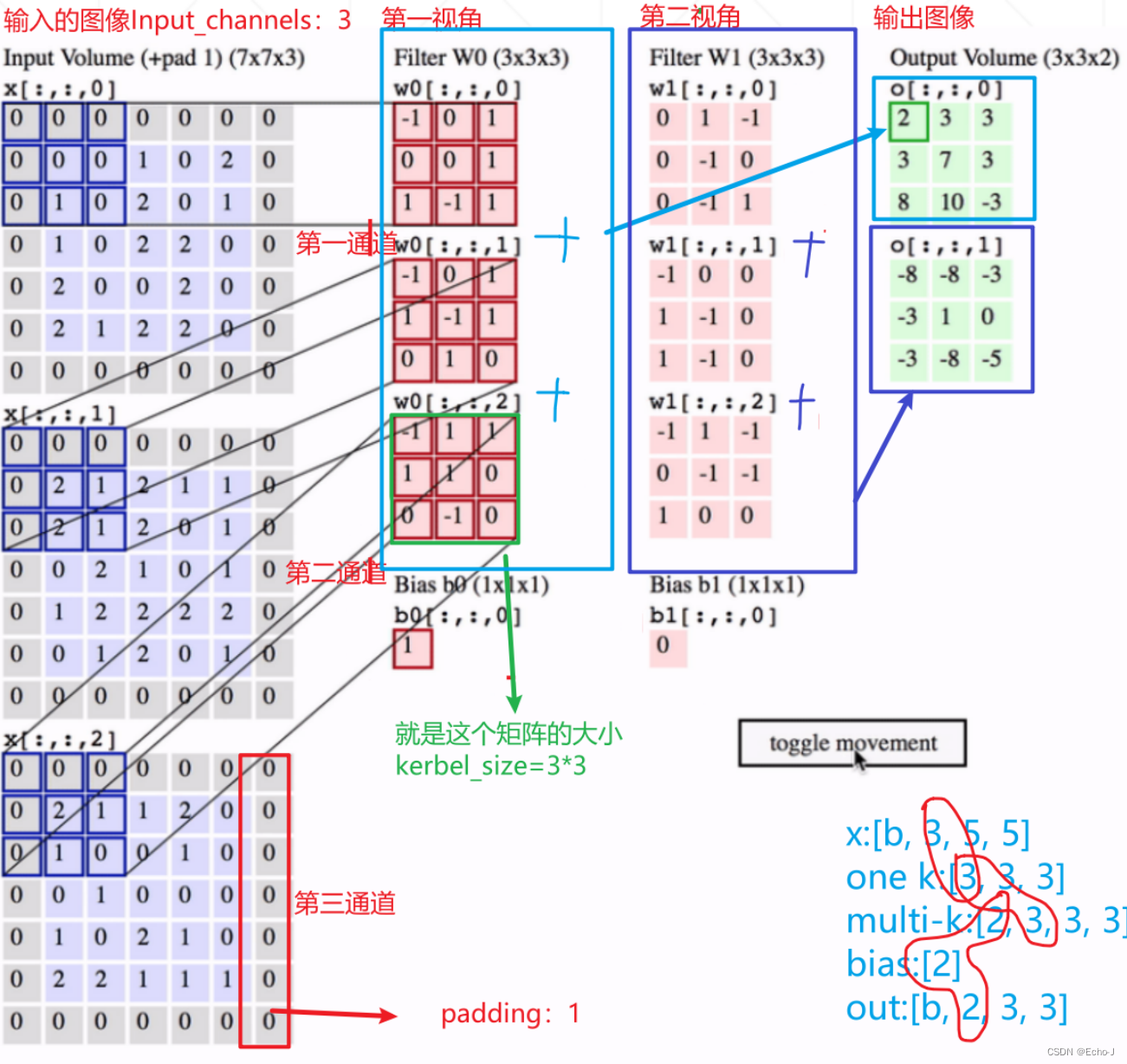
Input_channels :输入的图像的通道,彩色图像就是3,灰度图像就是1
Kernel_channels: 以多少个视角来观察图像
Kernel_size : 特征矩阵的size
Stride: 每次向下/左移动的步长
Padding: 空白的数量,补0
实例(图-11),注意右下角的标注,每个圈中的值必须相等。将同一视角不同通道得出来的矩阵进行叠加,最后会得到一个高维的特性。卷积的过程叫做特征提取。
输出图像的大小计算(公式-2):

代码示例:
- # 1、
- x=torch.rand(1,1,28,28) #[b,c,h,w]
- layer=nn.Conv2d(1,3,kernel_size=3,stride=1,padding=0) # weight [3,1,3,3],不补零
- out=layer.forward(x)
- print(out.shape)
- #torch.Size([1, 3, 26, 26])
-
- # 2、
- layer=nn.Conv2d(1,3,kernel_size=3,stride=1,padding=1) # weight [3,1,3,3],补零
- out=layer.forward(x)
- print(out.shape)
- #torch.Size([1, 3, 14, 14])
-
- # 3、
- layer=nn.Conv2d(1,3,kernel_size=3,stride=2,padding=1) # weight [3,1,3,3],补零
- out=layer.forward(x)
- print(out.shape)
- #torch.Size([1, 3, 14, 14])
-
- # 说明:
- #现在基本不用layer.forward,而是用layer
- out=layer(x) #推荐使用
- print(out.shape)
- #torch.Size([1, 3, 14, 14])
-
- ###### inner weight $ bias #########
- #直接调用
- print(layer.weight)
- # Parameter containing:
- # tensor([[[[-0.1249, -0.3302, -0.1774],
- # [-0.1542, 0.0873, 0.0282],
- # [-0.0006, -0.1798, -0.1030]]],
- #
- #
- # [[[ 0.1932, 0.3240, 0.1747],
- # [-0.2188, -0.1775, -0.0652],
- # [-0.1455, -0.1220, 0.0629]]],
- #
- #
- # [[[ 0.2596, 0.3017, 0.2028],
- # [-0.2629, -0.0715, 0.3267],
- # [ 0.3174, -0.1441, -0.1714]]]], requires_grad=True)
-
- print(layer.weight.shape)
- # torch.Size([3, 1, 3, 3])
-
- print(layer.bias.shape)
- # torch.Size([3])

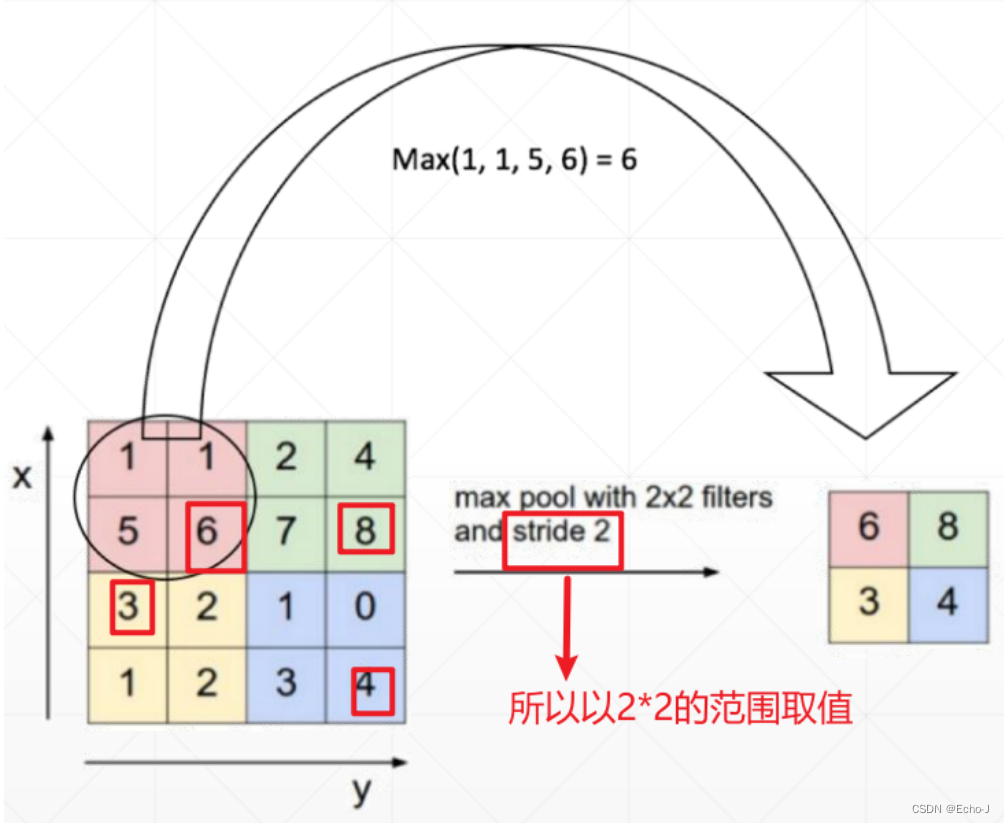
向上/向下采样
最大采样,选取最大的(图-12):
代码演示:
- x=out
- print(x.shape)
- #torch.Size([1, 3, 14, 14])
-
- layer=nn.MaxPool2d(2,stride=2) #最大池化,2*2的滑动窗口,步长为2
- out=layer(x) #推荐使用
- print(out.shape)
- #torch.Size([1, 3, 7, 7])
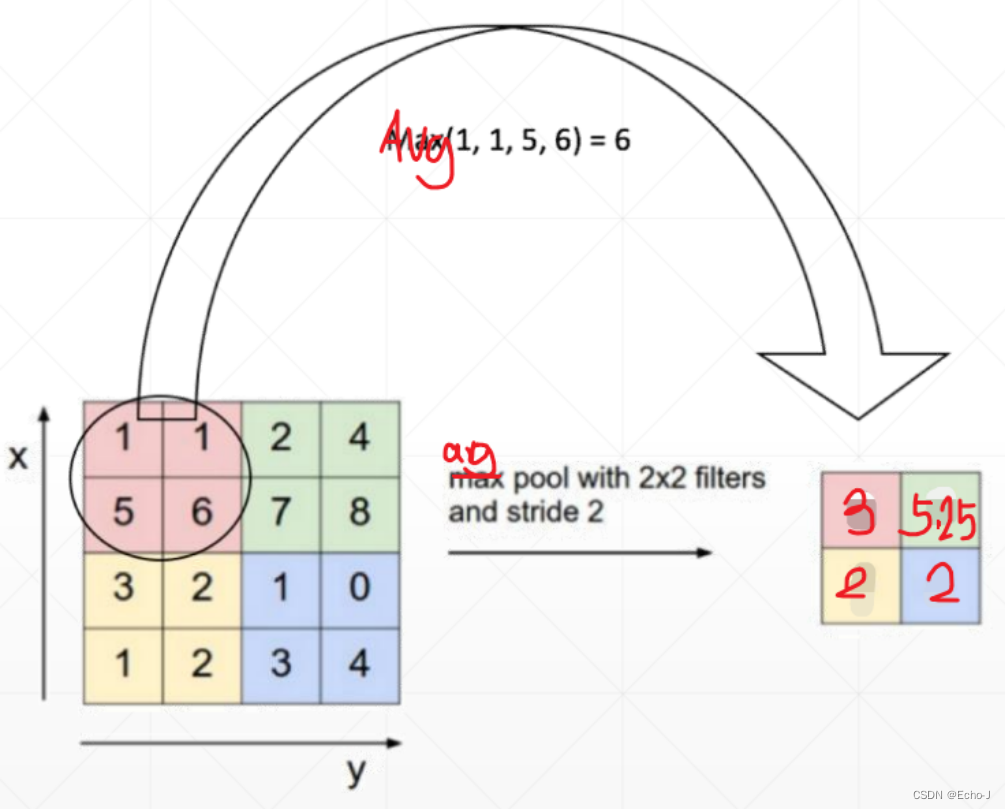
平均采样,选择平均值(图-13):
代码演示:
- x=out
- print(x.shape)
- #torch.Size([1, 3, 14, 14])
-
- out=F.avg_pool2d(x,2,stride=2) #平均池化,2*2的滑动窗口,步长为2
- print(out.shape)
- #torch.Size([1, 3, 7, 7])
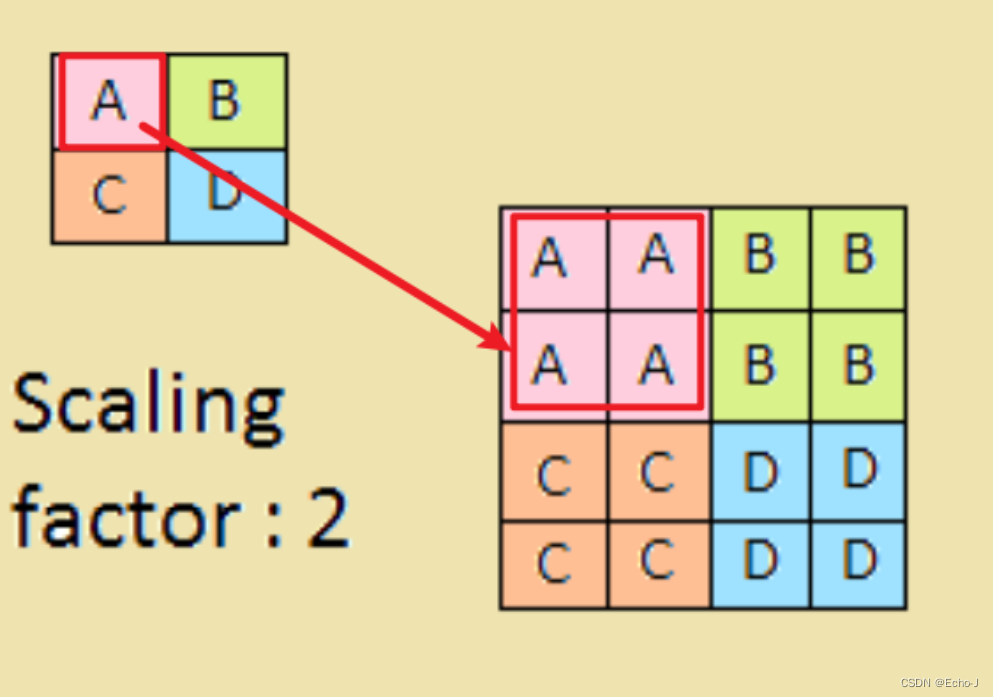
上采样,选取最邻近的(图-14):
代码演示:
- x=out
- print(out.shape)
- # torch.Size([1, 3, 7, 7])
- out=F.interpolate(x,scale_factor=2,mode='nearest')# 为放大倍数
- print(out.shape)
- # torch.Size([1, 3, 14, 14])
- out=F.interpolate(x,scale_factor=3,mode='nearest')
- print(out.shape)
- # torch.Size([1, 3, 21, 21])
扩展到卷积层:

1、输入是一个32*32的灰度图像[1, 32, 32],使用一个3*3的特征矩阵进行卷积,分别从6个角度进行卷积,步长为1,会得到一个[6,1,28,28]的图像
2、上采样-》[6,1,14,14]
3、卷积-》[16,1,10,10]
4、上采样-》[16,1,5,5]
5、全连接
6、全连接
7、高斯分布
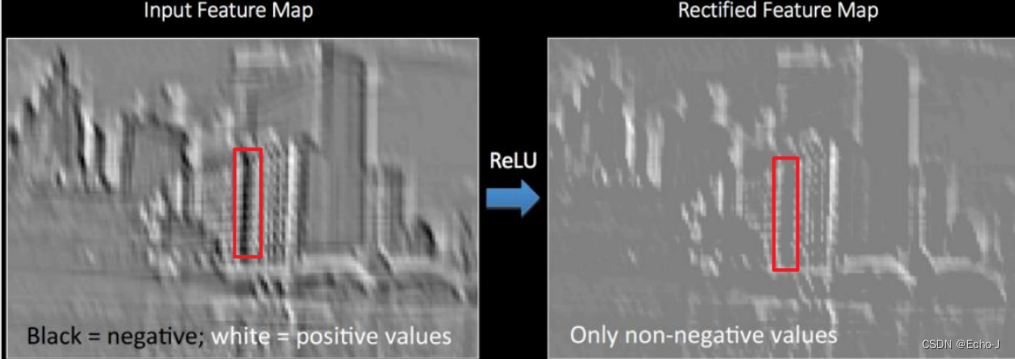
ReLU
代码演示:
- #两种方式,一种是nn.ReLU,另一种是F.relu
- x=out
- print(x.shape)
- #torch.Size([1, 3, 7, 7])
-
- layer=nn.ReLU(inplace=True)
- out=layer(x)
- print(out.shape)
- #torch.Size([1, 3, 7, 7])
-
- #与上面三行等价
- out=F.relu(x)
- print(out.shape)
- #torch.Size([1, 3, 7, 7])
-
- #relu激活函数并不改变size大小

