
热门标签
热门文章
- 1直接拿来用!最火的Android开源项目(三)(完结篇)_求android 简单项目所有完整源代码,要能够直接导入adt中使用的
- 2西红柿叶病害检测(yolov8模型,从图像、视频和摄像头三种路径识别检测,包含登陆页面、注册页面和检测页面)
- 3数据结构与算法导论---通讯录的实现_数据结构与算法实训通讯录代码总结
- 4vivo刷入鸿蒙,vivo鸿蒙系统刷机包
- 5非技术面试题_java非技术面试题
- 6100天精通Go语言(精品VIP版)专栏简介
- 7区块链的前世今生:走向高可靠企业应用
- 8动态规划之背包问题(java)全面总结_java 背包问题解析
- 9如何解决由于动态数据导致el-select下拉组件无法回显数据的问题_el-select动态添加的options如何回显
- 10玩转Mysql 五(MySQL索引)
当前位置: article > 正文
基于Matlab的无人船局部避碰算法仿真平台_无人船控制仿真程序
作者:很楠不爱3 | 2024-05-04 23:05:54
赞
踩
无人船控制仿真程序
无人船动态自主避碰能够根据传感器数据,对周围环境中的突发或高速障碍物进行快速规避,以确保无人船在航行过程中的安全。常用的动态自主避碰算法有人工势场法、动态窗口法、速度障碍法、向量场直方图法等。现有的避碰算法还存在如下几个问题:
(1)算法未结合国际海上避碰规则,导致避碰失败或二次事故。
(2)算法未考虑无人船的操纵特性,导致规划出的避碰路径难以运用于无人船的实际航行中。
(3)算法计算量大,无法实现高速无人船在复杂海况下的快速避碰。
如果都用实船验证算法费时费力,成本十分高昂。此外,无人船航行过程中环境局部障碍可能非常多变,搭建符合要求的局部障碍也很复杂。因此,考虑采用Matlab搭建无人船局部避碰算法仿真平台。
一、界面
在Matlab环境下打开主程序,点击运行按钮
即会弹出如下窗口
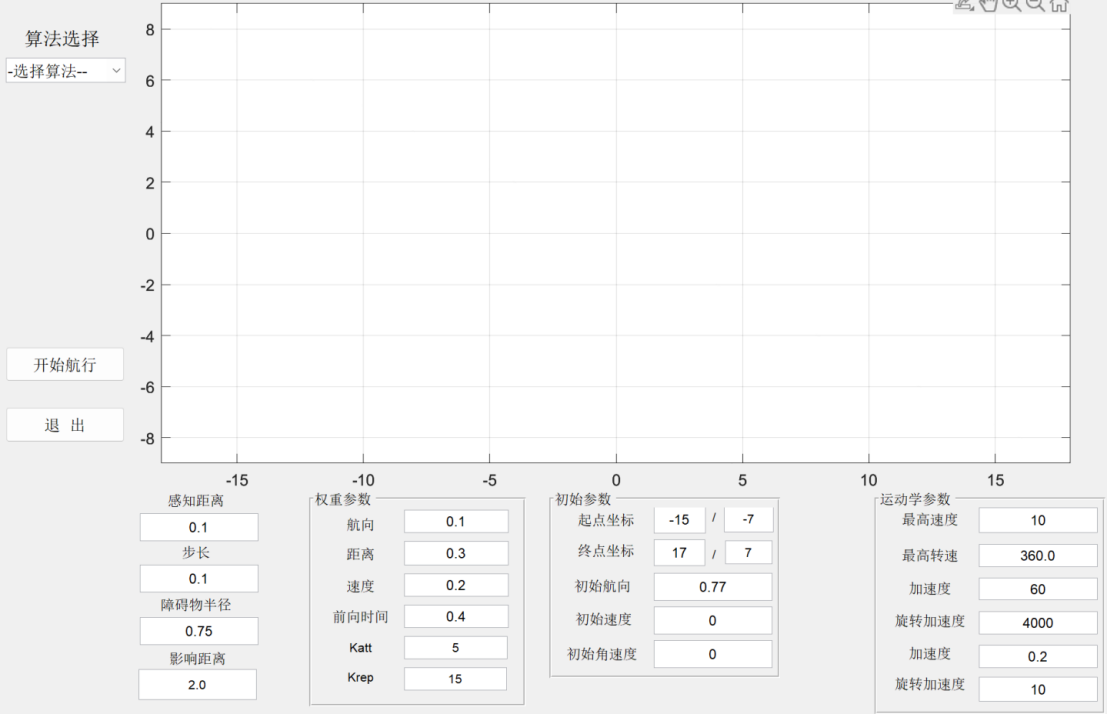
窗口可对运行算法进行设置,包括“算法选择”、“步长设置”,确认后,点击“开始航行”即可进入避碰算法仿真运行环境。“算法选择”包括如下内容:

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/很楠不爱3/article/detail/536505
推荐阅读
相关标签

