- 1神经网络——循环神经网络(RNN)
- 2CVE-2020-25648:RHSA-2021:1384: nss 安全和BUG修复更新
- 3Vue+element-ui上传logo图片到后端生成二维码展示到页面_elementui二维码图标
- 4ROS2知识(1):开始实践机器人_ros机器人开发实践
- 5网络工程管理 第四章 路由器 RIP OSPF 及配置实验_计算机网络 组网基础-静态路由、动态路由协议rip、ospf配置实验
- 6完美解决api-ms-win-crt-runtime-l1-1-0.dll详细步骤_api-ms-win-crt-runtime-l1-1-0.dll win7
- 7前端跨平台框架对比分析,看这篇就够了
- 8如何做好“向上管理”
- 9HTTP网络协议的请求方法,具体详解(2024-04-26)
- 10今天中午看到的几个哲学小故事
win平台使用惯导模块:WHEELTEC N100 模块_n100n惯导模块作用
赞
踩
模块介绍
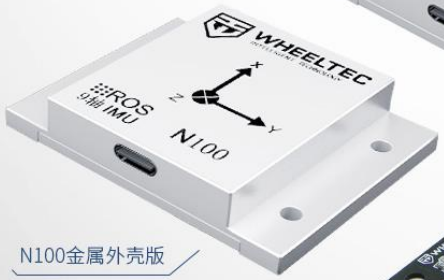
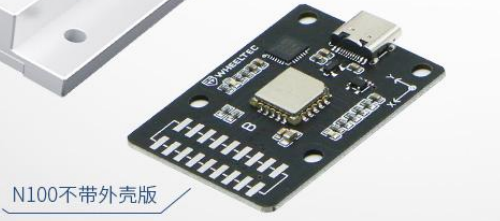
WHEELTEC N100 模块 是一个全新的,微型,高性能,经过严格 出厂校准的 IMU 核心。
其特点是具有一个强大的 Sigma-Point 卡尔曼滤波器 (SPKF),以及一套高性能算法,高达 1000Hz 的传感器采样频率和圆锥和划船运 动补偿,有较强的抗磁干扰能力。
其实物如下图:
输出:
- 载体航姿
- 位置
- 速度
- 传感器原始数据
- 系统状态等信息
具有固定 频率输出和问询输出两种模式,默认使用固定频率输出。
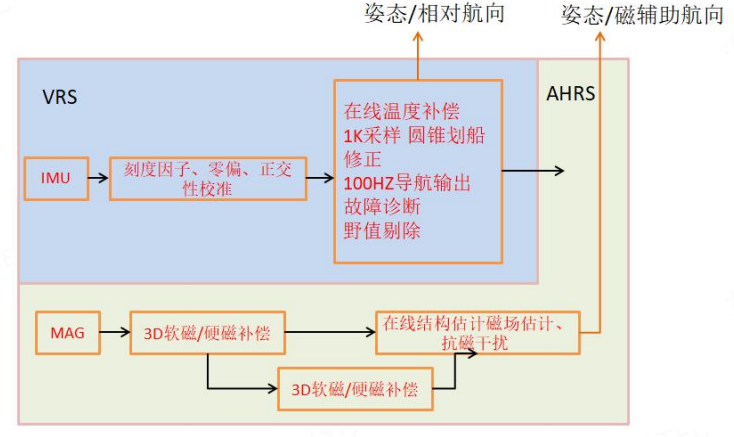
N100 惯导模块为航姿参考系统 AHRS,其核心算法原理简图如下:
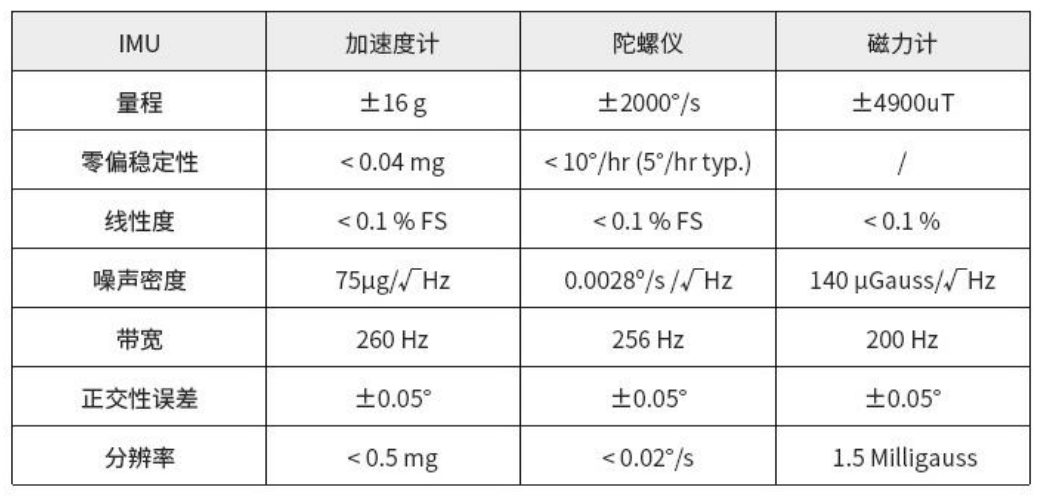
WHEELTEC N100 参数
WHEELTEC N100 惯导适用于移动机器人、无人机以及割草机等产品中
它包含:
- 三轴陀螺仪
- 三轴加速度计
- 三轴磁力计
- 温度计
属于九轴姿态传感器系列。WHEELTEC N100 参数如下图所示
WIN驱动安装
Windows 系统识别 WHEELTEC N100 惯导模块需要先安装驱动。
WHEELTEC N100 需要安装 CP2102 驱动
从网上下载一个 CP2102usb 驱动
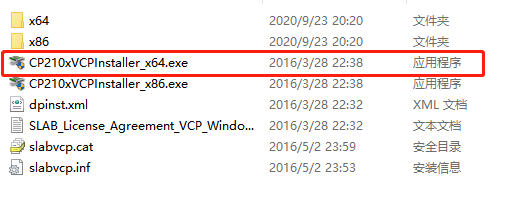
我的电脑是 64位的,所以选择 红框的 应用程序
按照提示点击下一步即可完成安装
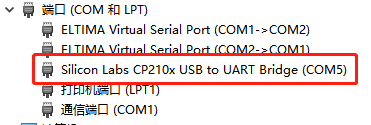
驱动安装完成之后,如果电脑接入了 WHEELTEC N100 模块,可以在设备管理 器中找到串口。
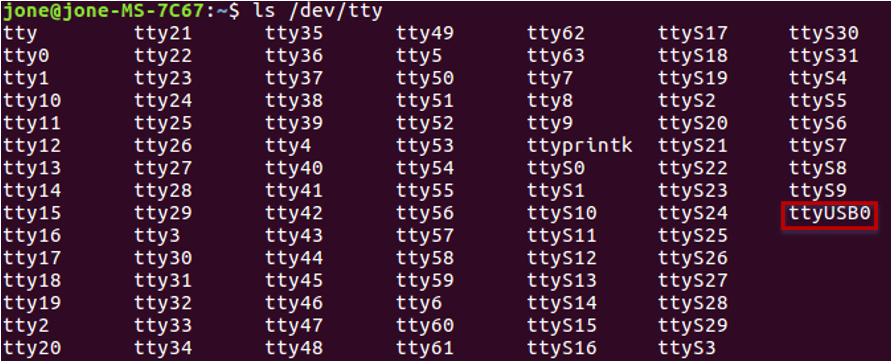
在Linux中一般不需要安装CP2102 的驱动。
接入usb后可通过
ls /dev/tty
- 1
来看下有没有挂着USB设备 来判断 驱动是否正常
连接上位机
将 WHEELTEC N 系列惯导通过 TYPE-C 转 USB 接至电脑后,打开其上位机软件
点击左上角的[Commuication],选择[Add Link]添加设备,在弹出来的弹窗 中选择对应的串口以及波特率,波特率默认为 921600。
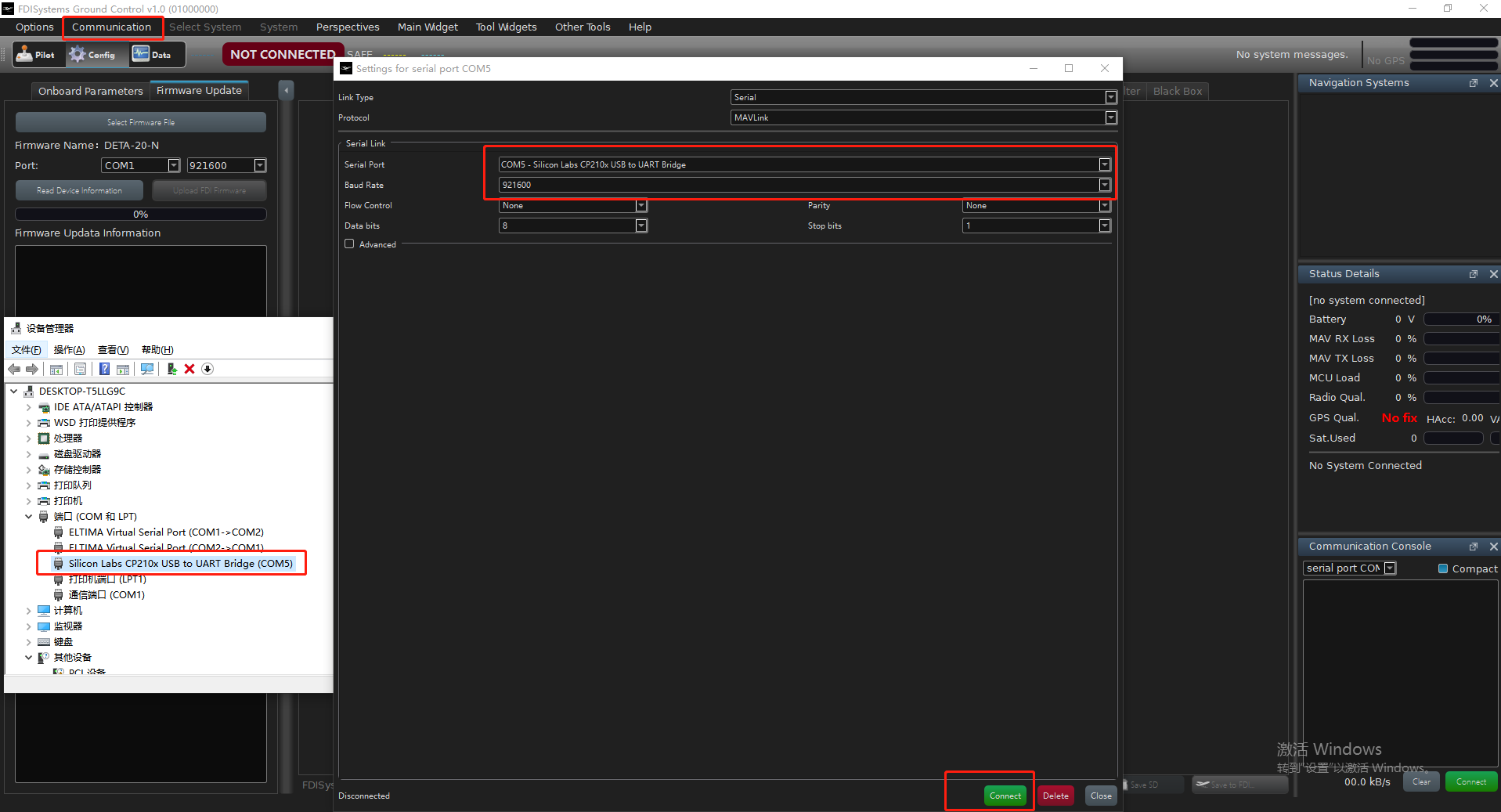
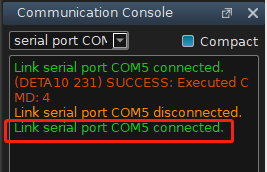
右下窗口 提示 对应串口连接,表示连接成功
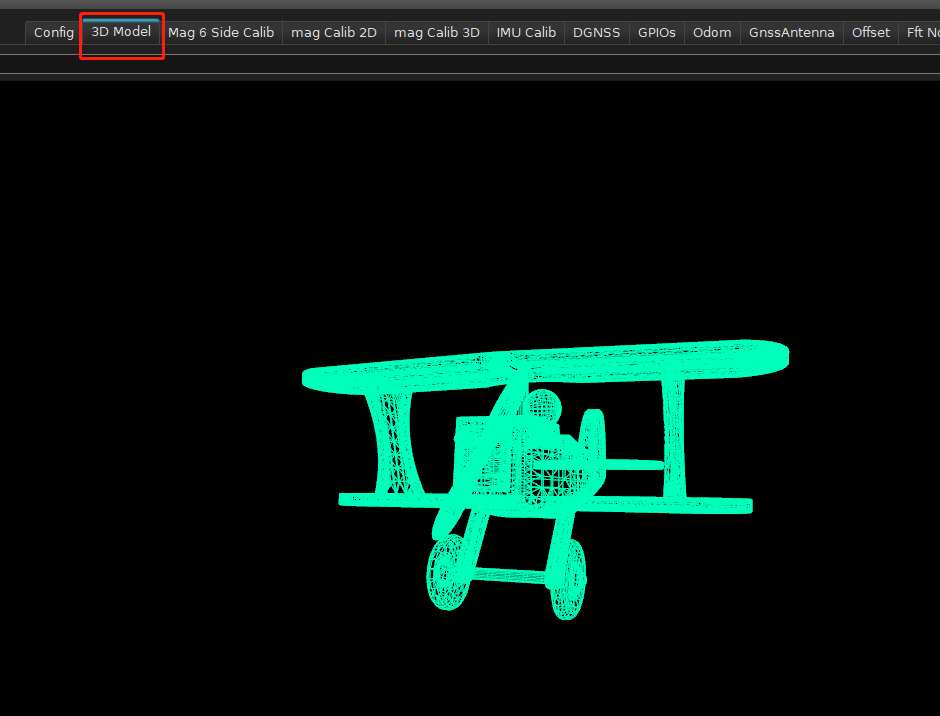
可以选择 3D model 功能,直观体验一下,姿态效果。 画面中心会出现一个 飞机,转动模块后,飞机会跟随转动
也可通过pilot模块查看姿态

点击左上角的[Data]可以读取 WHEELTEC N100 模块的数据,选 择 FDI Diagnostic Telemetry 界面,可以使用 Value Grid 显示数据格,也可使用 Value chart 显示数据图表,这里使用 Value chart 进行演示。在左下角选择数据包, 左上角选择网格中要显示的数据,点击[Start Telemetry]开始查看数据变化

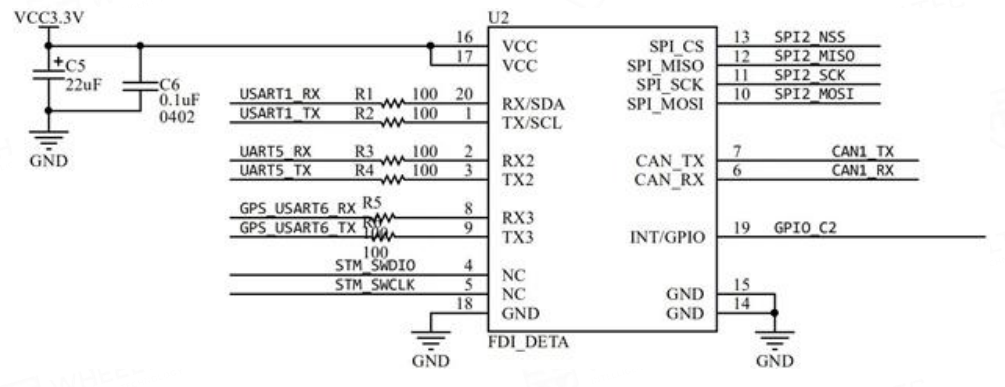
电路设计
使用 3.3V LDO 耐压电源供电,设计滤波电路保证良好的电源质量,所有对 外接口请尽量设计 ESD 防护,以免设备损坏。
模组上有磁力计传感器,用户使用时应注意远离大功率,强磁干扰源(如大 电机)。MEMS 器件精度会受到温度剧烈变化影响,请远离大发热源。
修改波特率
使用的的硬件平台如果不支持模块默认的 921600 波特率,需要将 其降低为 115200 波特率
方法如下:
连接上位机后, 在 Config 界面将 COMM1(UART)BAUD 从 921600 调整为 115200,然后点击 Save to FDI->Save to Permanent 进行保存写入,最后 点击 Restart 按钮重启,选择 115200 波特率重新连接上位机
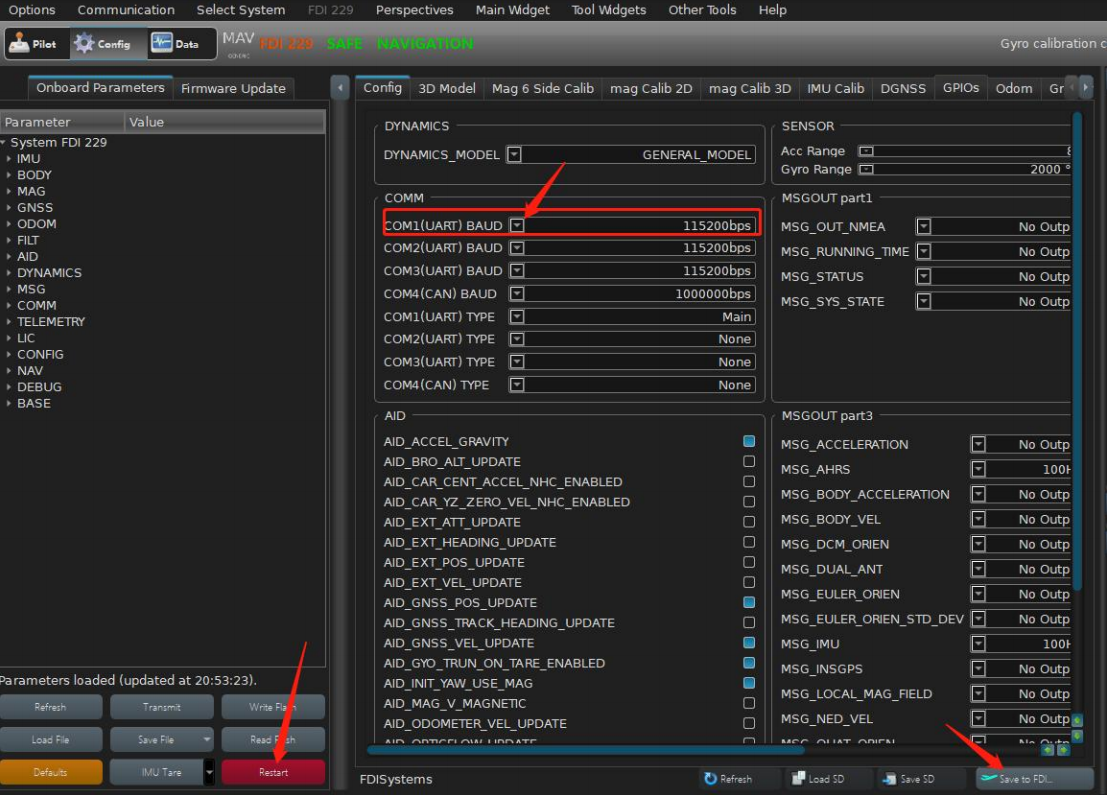
降低波特率之前需要先降低输出频率
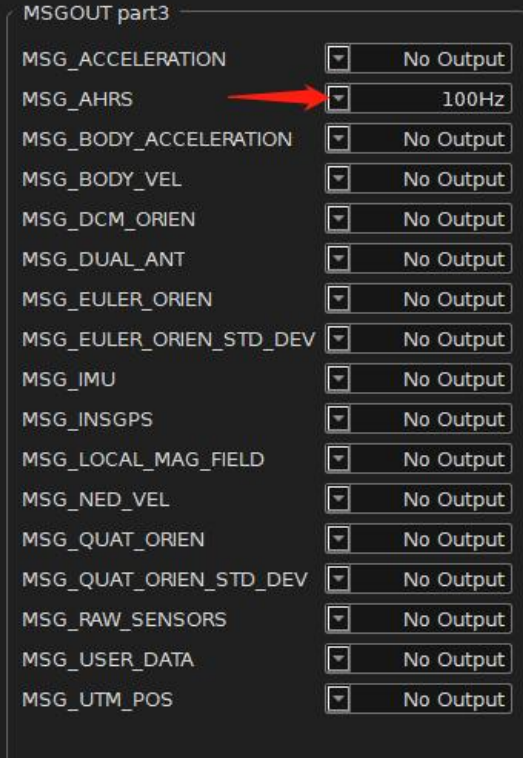
修改数据包发布频率
修改 AHRS 数据包的频率为 10Hz ,方法如下:
修改 AHRS 数据包的频率在 config 界面里,截取的一部分如下图所 示, 只要将 MSG_AHRS 的频率修改为 10Hz 即可,同时记得点击 Save to FDI->Save to Permanent 进行保存写入
数据包发布的最大频率为 400HZ。
模块调平校准
在使用惯导模块时,可能会出现输出数据有偏差的状况,比 如遇到输出的俯仰角和横滚角不为零的问题,说明模块与安装平面存在安装误差 角,需要对系统进行调平操作。将模块连接至上位机,在 config 界面进行操作。
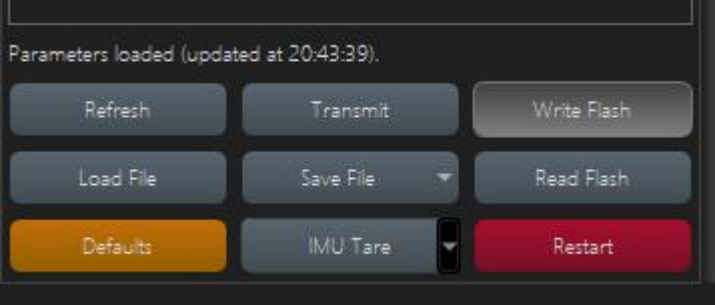
IMU Tare:该功能右侧有一个箭头,点击该箭头将显示如下图所示界面
-
Level:坐标系转换功能按钮。
将模块静止放置,点击该按钮后上位机将自动计算出该安装误差角的大小, 通过模块内置的旋转矩阵算法将模块坐标系转换到安装平面坐标系。点击完该按 钮后需要点击 Write Flash 按钮进行参数保存。 -
Acc Tare:加表调平按钮。
模块静止时加速度计输出的模长理论上为 1g(约 9.8m/s^2),如果加速度计输 出的真实模长与 1g 相差较大,则可以通过该按钮对加速度计零偏进行重新修正, 使其回到 1g 附近。注意点击该按钮前模块必须处于水平静止状态,点击完该按 钮后需要点击 Write Flash 按钮进行参数保存。 -
Gyro Tare:陀螺仪调平按钮。 该按钮的功能是重新计算陀螺仪静态零偏,从而使减去零偏之后的陀螺仪三 轴角速度回到零附近。该按钮必须在模块静止时操作,否则计算出来的零偏有误, 从而导致姿态漂移。如果用户在静止时发现姿态角在漂移,一般是陀螺仪静态零 偏计算有误,建议点击该按钮进行重新校准,点击完该按钮后需要点击 Write Flash 按钮进行参数保存。
-
Level + Gyro(Default):该按钮的作用等同于点击一次 Level 按钮再点击一 次 Gyro 按钮
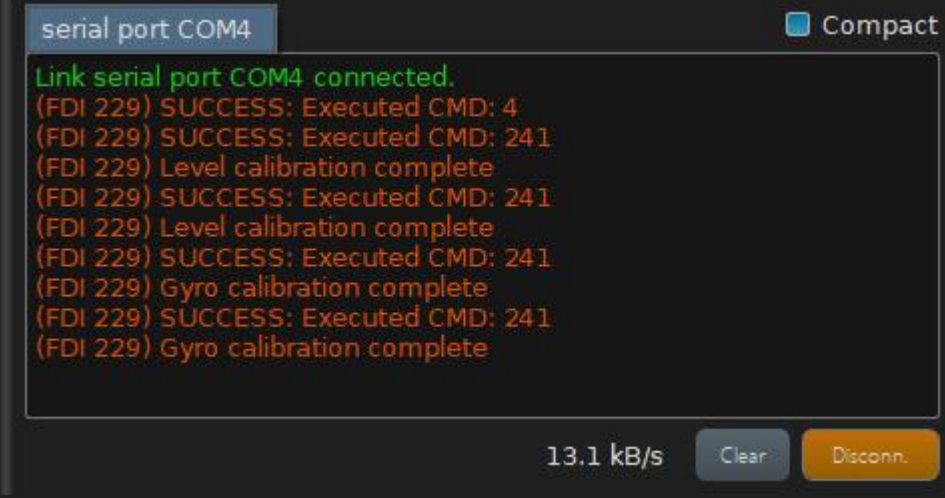
当完成调平修正后,上位机的右下角日志输出如下: