
热门标签
热门文章
- 1三元环的个数_三元环个数
- 2ubuntu使用shell脚本实现开机自启python程序_ubuntu开机自启python
- 3链表修改数据(附完整代码)_如何修改链表中的数据
- 4蓝桥杯 试题 算法训练 24点 C++ 详解
- 51分钟了解js如何实现下载文件功能的4种方式_js下载文件
- 624点卡牌游戏(C++)_卡牌游戏||q3299c++
- 7微信公共号消息推送给你心爱的她/他-Python3版本_微信推送怎么创建python文件
- 8Django框架的权限组件rbac_django项目实战/基于drf+vue实现rbac权限
- 9C# 如何提取字符串中的数字_c# 正则表达式 提取数字
- 10基于hadoop+spark的大规模日志的一种处理方案
当前位置: article > 正文
【CV】三维空间的旋转问题(Rotation in 3D space)_rotation 三维 yaw
作者:我家小花儿 | 2024-02-15 20:30:38
赞
踩
rotation 三维 yaw
Yaw, Pitch, Roll 角

以飞机的动作为例,
- 左右摆动是 Yaw 角 – 偏航角
- 上下摆动是 Pitch 角 – 俯仰角
- 绕轴摆动是 Roll 角 – 翻滚角
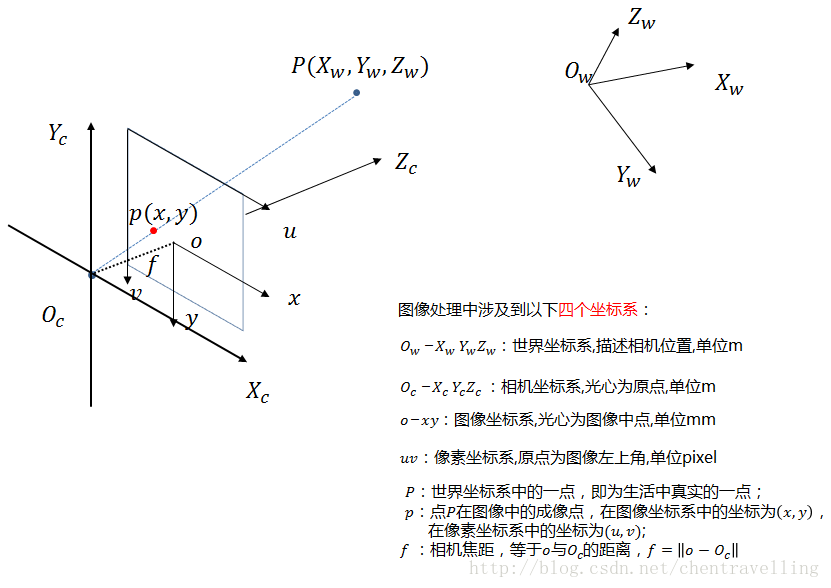
对于相机坐标系和世界坐标系的转换来看,
旋转矩阵
[ x ′ y ′ z ′ 1 ] = R ⋅ [ x y z 1 ] \begin{bmatrix}x'\\ y'\\ z'\\ 1\end{bmatrix}=R\cdot ⎣⎢⎢⎡x′y′z′1⎦⎥⎥⎤=R⋅⎣⎢⎢⎡xyz1⎦⎥⎥
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/86727
推荐阅读
相关标签

