
热门标签
热门文章
- 1头歌平台自建实践项目简易教程_头哥平台
- 2华为OD机试-传递悄悄话(Java&Python&Go)100%通过率_华为od机试传递悄悄话
- 3C++ & QT Creator 开发网络调试助手_网络调试助手源码c++
- 4【STM32】--基于STM32最小系统点亮LED灯
- 5python怎么创建一个文件夹,用python创建一个文件夹_python 创建文件夹
- 6vue+elementUI实现点击左右箭头切换按钮功能_element tabs 添加左右切换按钮
- 7MacOS安装多个Python版本导致Python3: Command not found_python3-config: command not found
- 8算法——马踏棋盘算法(骑士周游问题)/图的深度优先遍历+贪心算法优化
- 9吉林师范计算机考研真题,2021吉林师范大学考研历年真题
- 10C++ 函数调用的压栈过程_函数调用压栈过程 面试
当前位置: article > 正文
matlab机器人工具箱函数说明,matlab机器人工具箱 轨迹生成函数jtraj代码详解
作者:我家自动化 | 2024-05-14 02:26:01
赞
踩
用matlab的机器人工具箱规划机器人轨迹,轨迹为数字
Matlab中nargin变量是函数输入参数的个数。nargout变量是函数输出的个数
轨迹生成函数jtraj()的代码详解:
function [qt,qdt,qddt] = jtraj(q0, q1, tv, qd0, qd1)
一般情况下输入参数:q0初始各个关节的角度。q1最终点的各个关节的角度,tv:可以理解为时间,也可以理解为步数。一般用这三个就够了。函数会将qd0,qd1置零。
输出qt:不同时间内各个关节的角度,qdt,角速度,qddt,角加速度。
函数的核心是五次多项式插值。每一个角度的变化轨迹是个5次函数。
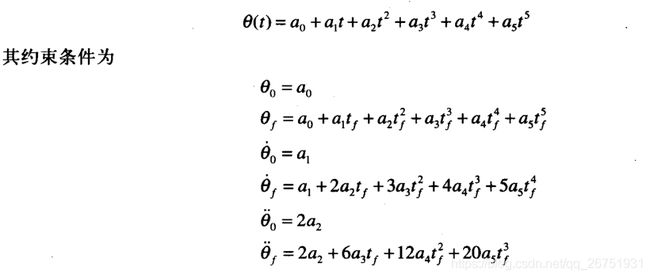
对于一次从静止点到静止点的运动,约束条件方程左边的值我们是知道的。一般情况下初始点的速度与加速度为0.即:

约束方程的解为:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/566870
推荐阅读
相关标签

