
热门标签
热门文章
- 1数据库课程设计报告总结_数据库课程设计总结
- 2计算机网络- 特定服务类型(Type of Service, TOS)& 服务质量(Quality of Service, QoS)_8位服务类型tos
- 3二叉树的七种遍历_7-1 二叉树的遍历!(简单)
- 4[nlp] Word2vec模型 skip-gram和CBOW区别_word2vec 比较skipgram和cbow
- 5H.264中的SPS和PPS_什么时候会出现sps 和pps
- 6十几年老Java咳血推荐,你薪资涨一波没毛病!小AD以为我端午都干嘛去了?
- 7快速体验 Llama3 的 4 种方式,本地部署,800 tokens/s 的推理速度真的太快了!_llama3推理速度
- 8SOA-Converter v1.3.2上线|新增Excel模板适配插件及ARXML合并功能,免费试用助你快速上手_excel转arxml
- 9Vivado中信号被优化掉,无法使用探针_vivado 设备设计和探针不匹配
- 10通信词典_feedmxu
当前位置: article > 正文
基于ZYNQ+linux+xenomai 的多轴运动控制平台关键技术研发-测试系统搭建(四)_zynq多轴电机控制
作者:笔触狂放9 | 2024-06-09 14:47:01
赞
踩
zynq多轴电机控制
本章搭建实验测试平台,对多轴运动控制平台的硬件功能和系统任务通信功能
进行测试。通过测试结果,进行平台硬件设计正确性验证和系统实时处理与同步控制
的功能与性能验证。
5.1
测试平台搭建

多轴运动控制系统的测试平台搭建如图
5.1
所示。测试平台由安全电源、多轴运
动平台样机(包括主控板
MC
)、上位机
PC
、手持盒和四个
80ST-M0 1330LMB
型华
大交流伺服电机(内置
17
位绝对式编码器)组成。样机通过电机动力接口和编码器
接口与四个伺服电机进行连接。
运动控制平台的硬件测试主要包括
UART
串口、
USB 2.0
和以太网接口功能测
试。平台系统的任务通信测试包括功能实现和性能表现两部分。其中,功能测试检验
双核间周期任务通信和非周期任务通信是否正常实现;性能测试检验运动控制系统
的实时性和同步控制功能。最后,在平台上运行机器人控制软件并连接手持盒,测试
整机运行效果。
5.2
运动控制平台硬件功能测试
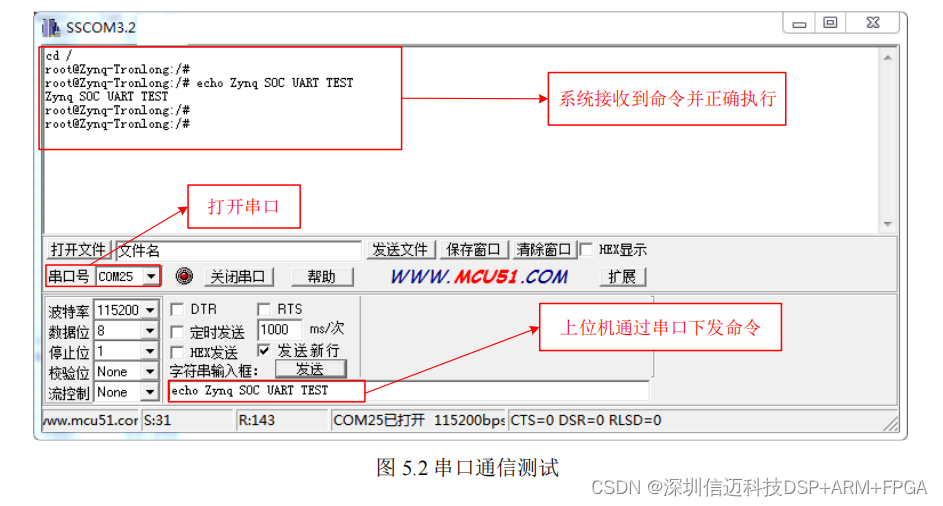
5.2.1 UART
接口测试
通过
UART
接口将控制平台和
Windows
主机进行连接,使用
SSCOM3.2
软件进
行串口测试。如图
5.2
所示,平台
UART
接口在
Windows
中正确识别为
COM25
。
SSCOM
软件中打开串口,并向
Linux
系统发送命令。通过消息窗口观测,
Linux
系
统正确接收到命令并执行。测试结果表明,系统的
UART
接口功能正常。
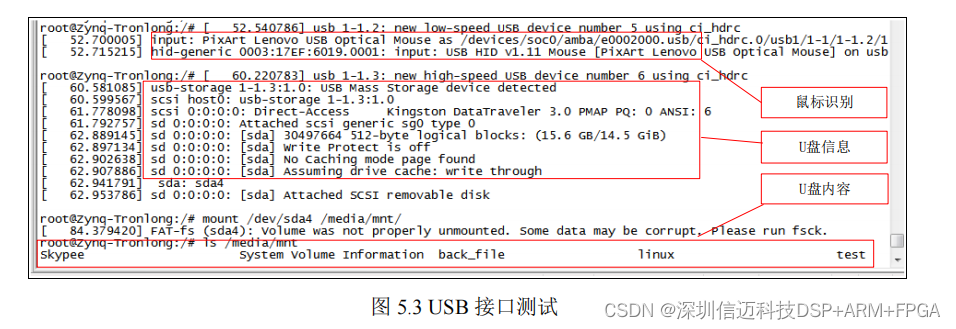
5.2.2 USB
接口测试
平台具有两个
USB 2.0
接口,对其分别进行功能测试。系统将接口
USB0
与鼠
标连接,将接口
USB1
与
U
盘连接。测试结果如图
5.3
所示,
Linux
系统正确识别到
鼠标和
U
盘设备。通过
mount
命令挂载
U
盘,可以查看
U 盘的文件。测试结果表明,系统的
USB
接口功能正常。
在机器人控制软件运行后,运动控制平台通过千兆以太网接口与手持盒进行通
信。首先设置手持盒的
IP
地址为
192.168.1.114
,完成与控制平台的网络连接。手持
盒与运动控制平台正常连接后,通过
SERVO ON
命令进行伺服系统使能,并读取运
动平台四轴的初始位置。如图
5.14
所示,手持盒软件读取到四轴的初始角度,与机
器人控制器软件的数据一致。测试结果表明,机器人控制软件在平台上正常运行,平
台实现与手持盒的连接与通信。

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/694537
推荐阅读
相关标签

