
热门标签
热门文章
- 1你觉得做为一名开发负责人需要具备哪些特质--chatgpt回答_开发项目负责人 需要具备
- 2Django进阶:DRF(Django REST framework)_django drf
- 3Kafka 最佳实践:构建高性能、可靠的数据管道_kafka消费模式最佳实践
- 4python转换成c语言_将Python转换成C语言,然后用Cython编译成exe
- 5记 搭建pycharm远程连接spark的艰难过程_importerror: no module named findspark
- 6从零开始研发GPS接收机连载——3、用HackRF软件无线电平台作为GPS模拟器_gps sdr sim
- 7utf8mb4_0900_ai_ci_utf8mb40900aici
- 8Java项目:客户关系管理系统(java+SpringBoot+layui+html+maven+mysql)_java 管理系统角色划分
- 9Hadoop集群环境配置及安装配置(详细过程包含安装包)_hadoop安装与配置_hadoop 配置
- 10深度学习笔记(九):神经网络剪枝(Neural Network Pruning)详细介绍
当前位置: article > 正文
OpenCV的基本绘图、平滑滤波(模糊)处理【C++的OpenCV 第五课-OpenCV图像常用操作(二)】_图像模糊处理 c++
作者:酷酷是懒虫 | 2024-06-19 16:47:39
赞
踩
图像模糊处理 c++
前文链接:
【C++的OpenCV】第四课-OpenCV图像常用操作(一):Mat对象深化学习、灰度、ROI
一、OpenCV基本绘图
1.1 OpenCV关于绘图的操作
1.1.1 cv::Point()
// Point类型的源码来源:
typedef Point2i cv::Point //规定cv::Point2i类型为cv::Point
typedef Point_<int> cv::Point2i // 规定将cv::Point_<int> 类型为 cv::Point12i,最常用,以此为例
// 同理还存在:typedef Point_<float> cv::Point2f 和
//typedef Point_<double> cv::Point2d
// 实际上参考的类型为cv::Point_<int>,故在源码中我们要找到类模板 class cv::Point_< _Tp >
typedef _Tp value_type // 又将类模板中的类型_Tp 定为 value_type.
// 这里,我们讨论value_type为int的情况,即cv::Point类型,如果不理解,多看上边几行转化逻辑!
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
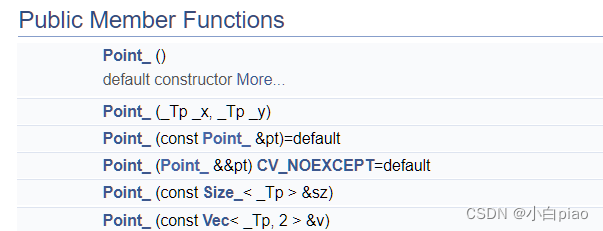
关于cv::Point()的常用的构造函数:
源码位置:Point()类型的源码解释
- Point_() :默认的构造函数
template<typename _Tp>
cv::Point_< _Tp >::Point_( )
- 1
- 2
- Point_() : 基于点xy轴坐标的构造函数
template<typename _Tp>
cv::Point_< _Tp >::Point_( _Tp _x, _Tp _y )
//参数解释:
1、_Tp _x :
template<typename _Tp>
_Tp cv::Point_< _Tp >::x
点point的x轴坐标
2、_Tp _y :
template<typename _Tp>
_Tp cv::Point_< _Tp >::y
点Point的y轴坐标
//以坐标创建一个点对象的示例:
//使用起来其实很简单,关键是看懂源码对大家大有帮助,
//工具的使用和理解中,我认为理解工具更重要,所以为大家进行了源码解析。
//示例1:
Point pt;
pt.x = 3;
pt.y = 4;
//示例2:
Point pt = Point(3,4);
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- Point_() :拷贝构造函数
cv::Point_< _Tp >::Point_ ( const Point_< _Tp > & pt )
// 参数解释:
1、pt :为另外一个点对象,且对象保证了传递对象过程中的安全性(const修饰),
将另一个点的数据拷贝到新的点上。
- 1
- 2
- 3
- 4
- 5
- Point_() :根据Size对象来构造点
template<typename _Tp>
cv::Point_< _Tp >::Point_ ( const Size_< _Tp > & sz )
// 参数解释:
1、 sz:一个Size对象,同样保证传递安装性。
Template class for specifying the size of an image or rectangle.
// 关于Size:该类包括两个名为width和height的成员。
// 该结构可以转换为旧的OpenCV结构CvSize和CvSize2D32f。
// 可以使用与Point_相同的一组算术和比较操作。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
1.1.2 cv::Scalar()
// Scalar 类的由来和功能
// 由来:
typedef Scalar_<double> cv::Scalar // Scalar类实际上就是Scalar_<double>类
// 其类模板为:
template<typename _Tp>
class cv::Scalar_< _Tp > // 当_Tp为double类型时,为Scalar()类
//从Vec派生的4元素向量的模板类。
//从Vec<_Tp,4>导出,Scalar_和Scalar可以用作典型的4元素向量。
//此外,它们还可以转换为CvScalar或从CvScala转换。Scalar类型在OpenCV中广泛用于传递像素值。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
关于cv::Scalar()的常用的构造函数:
源码位置:Scalar()类的构造函数
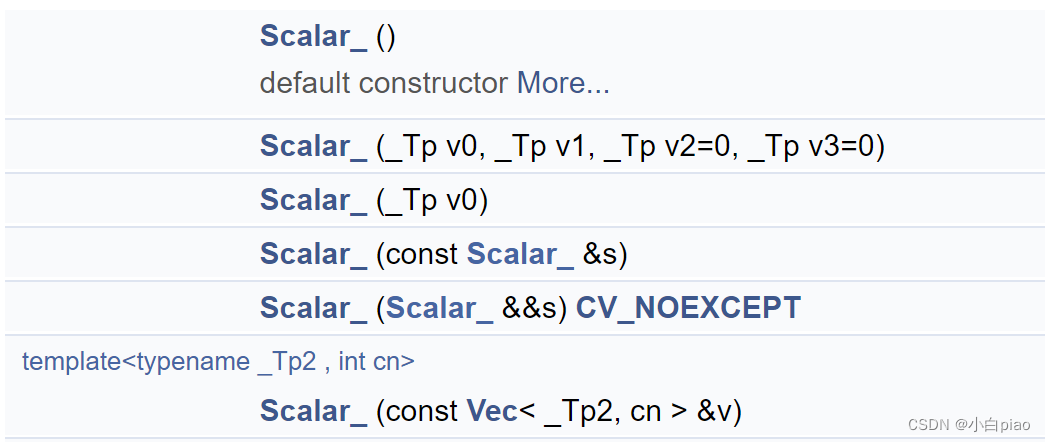
- Scalar_()的构造函数
1、默认构造函数:
template<typename _Tp>
cv::Scalar_< _Tp >::Scalar_ ()
2、四向量值构造函数:
template<typename _Tp>
cv::Scalar_< _Tp >::Scalar_ ( _Tp v0,
_Tp v1,
_Tp v2 = 0,
_Tp v3 = 0
)
//这个构造函数和拷贝构造函数使用频率较高
//广泛使用它来表示BGR颜色值(3个参数)。如果不使用最后一个参数,则无需定义最后一个参数。
//我们被要求一个颜色参数:
Scalar( a, b, c )
//我们将定义一个BGR颜色,如:Blue = a,Green = b和Red = c
3、拷贝构造函数:
template<typename _Tp>
cv::Scalar_< _Tp >::Scalar_ ( const Scalar_< _Tp > & s )
4、单值构造函数:
template<typename _Tp>
cv::Scalar_< _Tp >::Scalar_ ( _Tp v0 )
5、Vec容器类构造函数:
template<typename _Tp>
template<typename _Tp2 , int cn>
cv::Scalar_< _Tp >::Scalar_ ( const Vec< _Tp2, cn > & v )
// _Tp2为通道数据类型,cn为通道数。
// 要论Scalar还有什么用途,只要理解其本质“传递像素值”即可灵活使用。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
1.1.3 cv::line()画线
- 函数原型:
void cv::line ( InputOutputArray img,
Point pt1,
Point pt2,
const Scalar & color,
int thickness = 1,
int lineType = LINE_8,
int shift = 0
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 参数解释:
1、img :画在哪里,即背景板,是一个Mat对象(或是InputOutputArray类型同类型即可)
2、pt1、pt2:划线的两个点(划线原理是在两个点之间划线
3、color :Scalar类型的颜色描述,例如:Scalar( 255, 0, 0 )
4、thickness:线条的粗细,这个自己根据画出来的情况调节即可
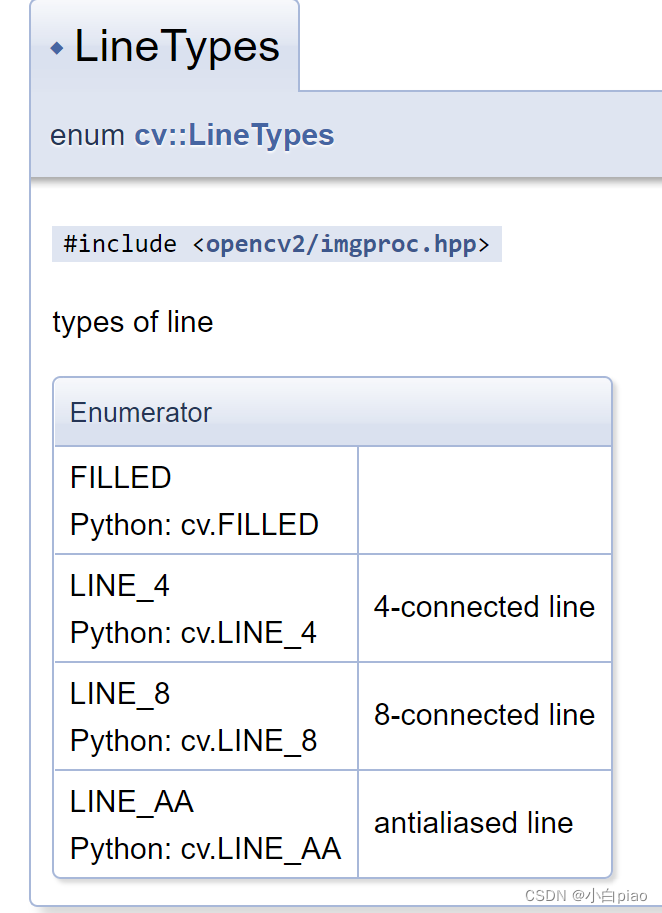
5、lineType:线的类型,下边展示类型的宏作为选择参考。
6、shift:点坐标中的小数位数。0位没有小数位即整数。
- 1
- 2
- 3
- 4
- 5
- 6
- 函数功能:
绘制连接两点的线段。
函数线绘制图像中pt1和pt2点之间的线段。
线条由图像边界剪裁。对于具有整数坐标的非抗锯齿线,
使用8连通或4连通Bresenham算法。粗线以圆角结尾绘制。
使用高斯滤波绘制抗锯齿线。
- 1
- 2
- 3
- 4
- 5
- 关于线的类型的宏:
- 实例:
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#define w 400
using namespace cv;
void DrawLine( Mat img, Point , Point );// 划线函数前置声明
int main( int argc, char* argv[] ){
char windowName[] = "Drawing Window";//显示图像的窗口的名称
Mat img = Mat::zeros( w, w, CV_8UC3 );//长宽各400像素的8位3通道无符号的空白图像矩阵
MyLine( img, Point( 0, w/2 ), Point( w/4, w/2 ) ); // 画一条位于图像y方向中间的水平线,且长度为100像素
imshow( windowName, img ); // 将图片显示在窗口中
waitKey( 0 );
return(0);
}
void DrawLine( Mat img, Point s, Point e )
{
int lineThickness = 3;
int lineType = LINE_8;
line( img,s,e,Scalar( 0, 0, 0 ),lineThickness,lineType );//调用划线函数,线的色彩为白色
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
1.1.4 cv::rectangle()画矩形
- 函数原型:
void cv::rectangle ( InputOutputArray img,
Point pt1,
Point pt2,
const Scalar & color,
int thickness = 1,
int lineType = LINE_8,
int shift = 0
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 参数解释:
1、pt1、pt2:矩形对角线的点
2、其他参数同划线函数。
- 1
- 2
- 函数功能:
向右上方绘制简单、粗或填充的矩形。
函数cv::rectangle()绘制矩形轮廓或填充矩形,其两个对角为pt1和pt2。
- 1
- 2
- 实例:
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
using namespace cv;
int main( void ){
char rook_window[] = "Drawing 2: Rook";
Mat rook_image = Mat::zeros( w, w, CV_8UC3 );
rectangle( rook_image,
Point( 0, 7*400/8 ),
Point( 400, 400),
Scalar( 0, 255, 255 ),
FILLED,
LINE_8 );
imshow( rook_window, rook_image );
moveWindow( rook_window, 400, 200 );
waitKey( 0 );
return(0);
//这里就不一行一行解释代码了,上边画线看懂了,这个自然很轻松,主要是复习而已,大家多看看哈!
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
1.1.5 cv::circle()画圆
- 函数原型:
void cv::circle ( InputOutputArray img,
Point center,
int radius,
const Scalar & color,
int thickness = 1,
int lineType = LINE_8,
int shift = 0
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 参数解释:
1、center : 圆中心点坐标
2、radius:圆的半径
3、剩下的参数不必多言,如果大家认真看了划线的讲解,大家就都懂了
- 1
- 2
- 3
- 函数功能:
画个圆圈圈!
- 1
- 实例
#include <opencv2/core.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/highgui.hpp>
#define w 400
using namespace cv;
void DrawFilledCircle( Mat img, Point center ) // 小编实在懒得写前置声明了,这个图省事,当然标准格式还是参照划线的代码吧
{
circle( img,
center,
w/32,
Scalar( 0, 0, 255 ),
FILLED,
LINE_8 );
}
int main( void ){
char window[] = "Drawing Window";
Mat image = Mat::zeros( w, w, CV_8UC3 );
MyFilledCircle( atom_image, Point( w/2, w/2) );// 画布中心(200,200)的位置画圆
imshow( window, image );
waitKey( 0 );
return(0);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
二、图像的平滑滤波处理
2.1 概念
平滑滤波,也称之为模糊,是一种简单的图像处理的操作。
至于模糊的目的,一般情况下最多的情况用于降噪,其次用于边界检测的相关处理也是比较广泛的,当然其他用途还是得看具体的业务。
2.2 OpenCV关于图像模糊的操作
对于模糊处理,通常会使用到滤波器来处理图像。
2.2.1 常用滤波器的分类
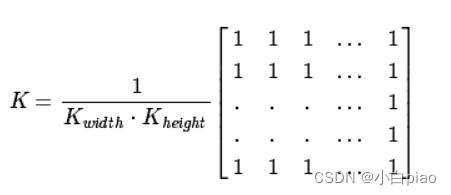
- 归一化框(方框/块)滤波:
这个过滤器是最简单的!每个输出像素是其内核相邻区域的均值(均为相等权重)
其内核如下:
- 高斯滤波器
可能是最有用的过滤器(虽然不是最快的)。高斯滤波是通过将输入数组中的每个点与高斯核进行卷积来完成的,然后将它们相加以产生输出数组。位于中间的像素将具有最大的权重。其邻居的权重随着它们与中心像素之间的空间距离的增加而减小。
其内核如下:

- 中值滤波器
中值滤波器遍历信号的每个元素(在这种情况下为图像),并用其相邻像素的中位数(位于估计像素周围的正方形邻域)替换每个像素。 - 双边滤波器
与高斯滤波器类似的方式,双边滤波器也考虑相邻像素,其权重分配给它们。这些权重具有两个分量,其中第一个是高斯滤波器使用的相同加权。第二个组件考虑了相邻像素与被评估的像素之间的强度差异。
2.2.2 各种滤波方法具体的代码实现
- 归一化滤波
- OpenCV提供函数cv :: blur()来使用此过滤器进行平滑处理。
void cv::blur(
InputArray src,
OutputArray dst,
Size ksize,
Point anchor = Point(-1,-1),
int borderType = BORDER_DEFAULT
)
/*
参数解释:
1、src:源图像(Mat对象),它可以有任意数量的通道,这些通道是独立处理的,
但深度应该是CV_8U、CV_16U、CV_36S、CV_32F或CV_64F。
2、dst:目标图像(Mat对象),输出的图像和源图像同类型和同尺寸。
3、ksize:滤波器使用的内核的大小(Size(x,y)宽度为w像素和高度h像素)。
4、anchor:锚点,默认值(Point(-1,-1))在所选择大小的内核的中心。
5、borderType:用于图像扩张外部像素的边框模式,
请参见边框类型(BORDERTYPE)。不支持BORDER_WRAP。
*/
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
-
- 关于BORDERTYPE的参考值:BORDERTYPE类型参考

- 关于BORDERTYPE的参考值:BORDERTYPE类型参考
- 高斯滤波
void cv::GaussianBlur (
InputArray src,
OutputArray dst,
Size ksize,
double sigmaX,
double sigmaY = 0,
int borderType = BORDER_DEFAULT
)
/*
参数解释:
1、sigmaX:X方向的高斯核标准偏差。
2、sigmaY: Y方向的高斯核标准偏差(默认为0)。
其余参数同之前。
*/
关于这个方法中提及的XY方向上距离高斯核的偏差,大家可以简单理解为,模糊的情况。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 中值滤波
void cv::medianBlur (
InputArray src,
OutputArray dst,
int ksize
)
// 参数解释:
// ksize:内核的线性尺寸;它必须是奇数且大于1,例如:3、5、7。。。
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 双边滤波
void cv::bilateralFilter (
InputArray src,
OutputArray dst,
int d,
double sigmaColor,
double sigmaSpace,
int borderType = BORDER_DEFAULT
)
/*
参数解释:
1、d:过滤过程中使用的每个像素邻域的直径。
如果它是非正的,则从sigmaSpace计算。
2、sigmaColor:颜色空间中的西格玛值。
该参数的值越大,意味着像素邻域(请参见sigmaSpace)中的颜色越远,
将混合在一起,从而产生更大的半等色区域。
3、sigmaSpace:在坐标空间中过滤西格玛值。
该参数的值越大,意味着只要颜色足够接近,
更远的像素就会相互影响(请参见sigmaColor)。
当d>0时,它指定邻域大小,而不考虑sigmaSpace。
否则,d与sigmaSpace成比例。
*/
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
双边滤波器可以很好地减少不需要的噪声,同时保持边缘相当清晰。然而,与大多数过滤器相比,它非常慢。
sigma值:为了简单起见,可以将2西格玛值设置为相同。如果它们很小(<10),滤镜将不会有太大的效果,而如果它们很大(>150),它们将有非常强的效果,使图像看起来“卡通”。
过滤器大小:大型过滤器(d>5)非常慢,因此建议对实时应用程序使用d=5,对需要重噪声过滤的脱机应用程序使用d=9。
2.3 参考源码
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
using namespace std;
using namespace cv;
int DELAY_CAPTION = 1500;
int DELAY_BLUR = 100;
int MAX_KERNEL_LENGTH = 31;
Mat src; Mat dst;
char window_name[] = "Smoothing Demo";
int display_caption( const char* caption );
int display_dst( int delay );
int main( void )
{
namedWindow( window_name, WINDOW_AUTOSIZE );
src = imread( "../data/lena.jpg", IMREAD_COLOR );
if( display_caption( "Original Image" ) != 0 ) { return 0; }
dst = src.clone();
if( display_dst( DELAY_CAPTION ) != 0 ) { return 0; }
if( display_caption( "Homogeneous Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ blur( src, dst, Size( i, i ), Point(-1,-1) );
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
if( display_caption( "Gaussian Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ GaussianBlur( src, dst, Size( i, i ), 0, 0 );
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
if( display_caption( "Median Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ medianBlur ( src, dst, i );
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
if( display_caption( "Bilateral Blur" ) != 0 ) { return 0; }
for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 )
{ bilateralFilter ( src, dst, i, i*2, i/2 );
if( display_dst( DELAY_BLUR ) != 0 ) { return 0; } }
display_caption( "End: Press a key!" );
waitKey(0);
return 0;
}
int display_caption( const char* caption )
{
dst = Mat::zeros( src.size(), src.type() );
putText( dst, caption,
Point( src.cols/4, src.rows/2),
FONT_HERSHEY_COMPLEX, 1, Scalar(255, 255, 255) );
imshow( window_name, dst );
int c = waitKey( DELAY_CAPTION );
if( c >= 0 ) { return -1; }
return 0;
}
int display_dst( int delay )
{
imshow( window_name, dst );
int c = waitKey ( delay );
if( c >= 0 ) { return -1; }
return 0;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
大家可以在自己电脑的相关位置找到这个源码:…/opencv/opencv/tree/master/samples/cpp/tutorial_code/ImgProc/Smoothing.cpp
孜孜不倦,持续更新。期待关注!
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/酷酷是懒虫/article/detail/737078
推荐阅读
相关标签

