
- 1解决:Microsoft Visual C++ 14.0 is required. Get it with “Microsoft Visual C++ Build Tools“
- 2TransReID | 首次将transformer应用于行人重识别
- 3基于matlab的汽车牌照识别程序详细教程_matleb写一个图像识别照片中汽车车牌的程序
- 4记录Ubuntu20.04安装、NVIDIA显卡驱动安装和cuda安装_nvidia ubuntu ai 20.04
- 5Win10 使用VMware等虚拟机启动虚拟机蓝屏报错SYSTEM_SERVICE_EXCEPTION解决方案_联想电脑安装虚拟机的时候报错 system service exception
- 6【炼丹手册】炼丹环境上等马之WSL2-Ubuntu20.04+CUDA11.3+cuDNN8.9.0.131-1+PyTorch1.20.0搭建手册+查tGPT API使用踩坑_wsl cuda 11.3 cudnn
- 7计算机毕业设计之java+springboot基于vue的社区医院管理服务系统_在internet高速发展的今天,我们生活的各个领域都涉及到计算机的应用,其中包括社区
- 8基于Springboot汽车租赁租车系统设计与实现 开题报告参考
- 9[LeetCode解题报告] 127. 单词接龙_单词接龙 最低时间复杂度
- 10Python练习题答案: 我更喜欢SQL ...【难度:2级】--景越Python编程实例训练营,1000道上机题等你来挑战_cur.executemany("insert into book(id,price,name) v
深度优先搜索(DFS)(算法笔记)
赞
踩
本文内容基于《算法笔记》和官方配套练题网站“晴问算法”,是我作为小白的学习记录,如有错误还请体谅,可以留下您的宝贵意见,不胜感激。
前言
深度优先搜索是一种枚举所有完整路径以遍历所有情况的搜索方法,总是以“深度”作为前进的关键词。实现方式是有很多,最常见的是递归。
一、深度优先搜索概述
深度优先搜索属于搜索问题的一种,当问题可以被描述为“路径搜索”时,就可以采用搜素问题的所有解的方式来进行解决,所以DFS本质还是暴力。
深度搜索具有两个关键词,即“岔道口”和“死胡同”,这两个词来源于迷宫问题,这也是搜索问题最原始的表现。当碰到岔道口时,总是以“深度”作为前进的关键词,不碰到死胡同就不回头,因此被称为“深搜”。深搜适合于求解需要遍历所有解或路径的问题,并且剪枝很重要。深搜和广搜在数据结构中的应用就是对非线性存储结构进行遍历。
搜索和分治是两大分析问题的方法,而回溯、剪枝、动态规划可以说是对深度搜索和分治算法进行优化。
二、算法设计
在使用递归进行DFS时,将递归式作为搜索中的“岔道口”,将递归边界作为搜索中的“死胡同”,所以在设计DFS算法时,关键就是找准问题中的“岔道口”和“死胡同”。接下来通过实际例子介绍DFS,这里采用“晴问算法”中的题,书中的例题就不放了。
1.迷宫可行路径数

这道题是接下来一系列问题的核心,下面的问题都是基于这道题进行局部修改。
首先分析“岔道口”:
每次移动可以选择上下左右各一格进行移动,也就是说每次有四种选择,即四个岔道口,设当前坐标为(x ,y),四个岔道口的选择就分别为:(x+1,y),(x-1,y),(x,y+1),(x,y-1)。
其次分析“死胡同”:
当搜索到坐标位置元素为1时,表示无法通过,即无法继续搜索,这时这条路径便走到了尽头;当搜索到终点时,就不用继续搜索了。所以一共存在两个递归边界。
接下来就可以设计DFS()函数:
根据上面“岔道口”的设计,我们需要设置初始状态,即起点。用x表示行坐标,用y表示列坐标,所以函数看起来设这样的:
void DFS(int x , int y , int n , int m){···},当然,n和m可以放在外面。
递归边界:
if(number[x][y] == 1) return; //死胡同
if(x == n && y == m) { //走到终点
countr++; //计数器
return;
}
岔路口的选择:
需要路径在可移动范围内移动:不允许到曾经到过的地方并且不能出界,所以设置散列表标记曾经走过的位置,注意起点的状态,不论哪条路起点肯定是必须走的。如果满足移动条件,就沿岔路口移动。
完整代码如下:
#include<cstdio> //迷宫首先要确定起点和终点 #include<algorithm> #include<iostream> using namespace std; const int MAXN = 5; int number[MAXN][MAXN] = {}; int countr = 0; bool hashTable[MAXN][MAXN] = {true}; //这就不是优化了,如果不设这个条件,就会到达不了递归边界 //注意起点的状态,肯定要经过起点 void DFS(int x , int y , int n , int m){ if(number[x][y] == 1) return; //死胡同 if(x == n && y == m) { countr++; return; } //核心:四个岔路口 if(x + 1 <= n && hashTable[x + 1][y] == false) { //短路与,顺序也不能乱,不然会报错 hashTable[x + 1][y] = true; //注意一定是先把状态更新,先选上,再走 DFS(x + 1 , y , n , m); hashTable[x + 1][y] = false; //恢复状态 } if(x - 1 >= 0 && hashTable[x - 1][y] == false) { hashTable[x - 1][y] = true; DFS(x - 1 , y , n , m); hashTable[x - 1][y] = false; } if(y + 1 <= m && hashTable[x][y + 1] == false) { hashTable[x][y + 1] = true; DFS(x , y + 1 , n , m); hashTable[x][y + 1] = false; } if(y - 1 >= 0 && hashTable[x][y - 1] == false) { hashTable[x][y - 1] = true; DFS(x , y - 1 , n , m); hashTable[x][y - 1] = false; } } int main(){ int n , m; scanf("%d%d", &n , &m); for(int i = 0; i <= n - 1; i++) for(int j = 0; j <= m - 1; j++) scanf("%d", &number[i][j]); DFS(0 , 0 , n - 1, m - 1); printf("%d", countr); }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
2.指定步数的迷宫问题

这个问题在第一个问题的基础上更改计数器就可以了,相当于新加了一个递归深度的计数器。需要注意的是当存在满足K步的路径时,就不需要继续搜索了,这时直接用回溯算法进行优化,返回上一层。
完整代码如下:
#include<cstdio> //迷宫首先要确定起点和终点 #include<algorithm> #include<iostream> using namespace std; const int MAXN = 5; int number[MAXN][MAXN] = {}; bool flag = false; int k; bool hashTable[MAXN][MAXN] = {true}; //这就不是优化了,如果不设这个条件,就会到达不了递归边界 //注意起点的状态,肯定要经过起点 void DFS(int x , int y , int n , int m , int countr){ //countr可以设成参数随搜索动态变化,也可以像hashTable一样恢复状态,就是一个记录递归深度的计数器 if(flag) return; if(number[x][y] == 1) { //死胡同 return; } if(x == n && y == m) { if(countr == k) flag = true; return; } //四个岔路口 if(x + 1 <= n && hashTable[x + 1][y] == false) { //短路与,顺序也不能乱,不然会报错 hashTable[x + 1][y] = true; //注意一定是先把状态更新,先选上,再走 DFS(x + 1 , y , n , m , countr+1); hashTable[x + 1][y] = false; //恢复状态 } if(x - 1 >= 0 && hashTable[x - 1][y] == false) { hashTable[x - 1][y] = true; DFS(x - 1 , y , n , m , countr+1); hashTable[x - 1][y] = false; } if(y + 1 <= m && hashTable[x][y + 1] == false) { hashTable[x][y + 1] = true; DFS(x , y + 1 , n , m , countr+1); hashTable[x][y + 1] = false; } if(y - 1 >= 0 && hashTable[x][y - 1] == false) { hashTable[x][y - 1] = true; DFS(x , y - 1 , n , m , countr+1); hashTable[x][y - 1] = false; } } int main(){ int n , m; scanf("%d%d%d", &n , &m , &k); for(int i = 0; i <= n - 1; i++) for(int j = 0; j <= m - 1; j++) scanf("%d", &number[i][j]); DFS(0 , 0 , n - 1, m - 1 , 0); if(flag == true) printf("Yes"); else printf("No"); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
3.矩阵最大权值
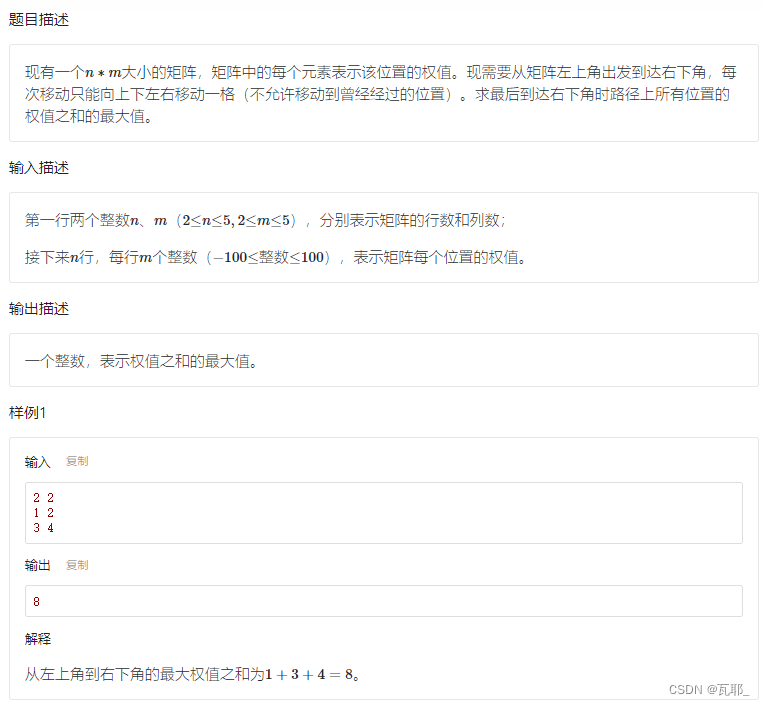
这道题也是加一个计数器就可以了,不过记录的是权值,即坐标位置元素的值。
完整代码如下:
#include<cstdio> //迷宫首先要确定起点和终点 #include<algorithm> #include<iostream> //权值随着搜索而动态改变 using namespace std; const int MAXN = 5; int number[MAXN][MAXN] = {}; int MAX = -10e6; bool hashTable[MAXN][MAXN] = {true}; //这就不是优化了,如果不设这个条件,就会到达不了递归边界 //注意起点的状态,肯定要经过起点 void DFS(int x , int y , int n , int m , int value){ if(x == n && y == m) { if(value > MAX) MAX = value; return; } //核心:四个岔路口 if(x + 1 <= n && hashTable[x + 1][y] == false) { //短路与,顺序也不能乱,不然会报错 hashTable[x + 1][y] = true; //注意一定是先把状态更新,先选上,再走 DFS(x + 1 , y , n , m , value + number[x + 1][y]); hashTable[x + 1][y] = false; //恢复状态 } if(x - 1 >= 0 && hashTable[x - 1][y] == false) { hashTable[x - 1][y] = true; DFS(x - 1 , y , n , m , value + number[x - 1][y]); hashTable[x - 1][y] = false; } if(y + 1 <= m && hashTable[x][y + 1] == false) { hashTable[x][y + 1] = true; DFS(x , y + 1 , n , m , value + number[x][y + 1]); hashTable[x][y + 1] = false; } if(y - 1 >= 0 && hashTable[x][y - 1] == false) { hashTable[x][y - 1] = true; DFS(x , y - 1 , n , m , value + number[x][y - 1]); hashTable[x][y - 1] = false; } } int main(){ int n , m; scanf("%d%d", &n , &m); for(int i = 0; i <= n - 1; i++) for(int j = 0; j <= m - 1; j++) scanf("%d", &number[i][j]); DFS(0 , 0 , n - 1, m - 1 , number[0][0]); printf("%d", MAX); }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
4.矩阵最大权值路径
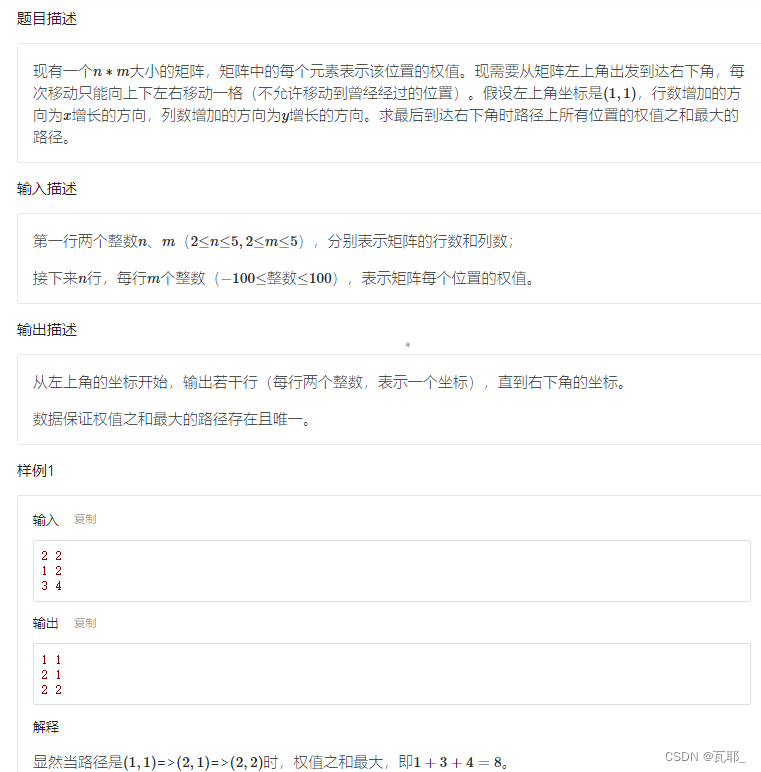
这道题可以开数组记录走过的坐标,并设置最大权值之和路径数组,如果权值之和更大,交换数组。注意更新数组状态,不要影响其他路径的选择。
完整代码如下:
#include<cstdio> //迷宫首先要确定起点和终点 #include<algorithm> #include<iostream> //权值随着搜索而动态改变 #include<vector>//这里也不知道开多长,就用vector实现吧 , 这道题是前面的整合,走一步记一下,如果权值更大,更新结果数组 using namespace std; const int MAXN = 5; int number[MAXN][MAXN] = {}; int MAX = -10e6; vector <int> temp , ans; bool hashTable[MAXN][MAXN] = {true}; //这就不是优化了,如果不设这个条件,就会到达不了递归边界 //注意起点的状态,肯定要经过起点 void DFS(int x , int y , int n , int m , int value){ if(x == n && y == m) { if(value > MAX) { MAX = value; ans = temp; } return; } //核心:四个岔路口 if(x + 1 <= n && hashTable[x + 1][y] == false) { //短路与,顺序也不能乱,不然会报错 hashTable[x + 1][y] = true; //注意一定是先把状态更新,先选上,再走 temp.push_back(x + 1); temp.push_back(y); DFS(x + 1 , y , n , m , value + number[x + 1][y]); hashTable[x + 1][y] = false; //恢复状态 temp.pop_back(); temp.pop_back(); } if(x - 1 >= 0 && hashTable[x - 1][y] == false) { hashTable[x - 1][y] = true; temp.push_back(x - 1) ; temp.push_back(y); DFS(x - 1 , y , n , m , value + number[x - 1][y]); hashTable[x - 1][y] = false; temp.pop_back(); temp.pop_back(); } if(y + 1 <= m && hashTable[x][y + 1] == false) { hashTable[x][y + 1] = true; temp.push_back(x) ; temp.push_back(y + 1); DFS(x , y + 1 , n , m , value + number[x][y + 1]); hashTable[x][y + 1] = false; temp.pop_back(); temp.pop_back(); } if(y - 1 >= 0 && hashTable[x][y - 1] == false) { hashTable[x][y - 1] = true; temp.push_back(x) ; temp.push_back(y - 1); DFS(x , y - 1 , n , m , value + number[x][y - 1]); hashTable[x][y - 1] = false; temp.pop_back(); temp.pop_back(); } } int main(){ int n , m; scanf("%d%d", &n , &m); for(int i = 0; i <= n - 1; i++) for(int j = 0; j <= m - 1; j++) scanf("%d", &number[i][j]); temp.push_back(0);temp.push_back(0); DFS(0 , 0 , n - 1, m - 1 , number[0][0]); for(vector<int> :: iterator it = ans.begin(); it != ans.end(); it = it + 2){ //迭代器遍历 printf("%d %d\n", *it + 1 , *(it + 1) + 1); } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
三、备注
1.递归只是一种实现方法,分治法和搜索都可以采用递归实现,且相对其他方法更简单,只是运行效率低且容易爆站,所以需要算法优化;
2.分治法和搜索虽然实现方式都是递归,但在分析问题时是两种不同的是思想;
3.回溯优化是指当递归满足某些条件时就可以停止递归返回上一层,所以回溯的前提是必须存在可行解保证可以走到递归边界,否则会死递归;
4.剪枝优化是指在面对岔路口时,在满足某些条件时,可以减少岔路口的选择;
5.注意优化和递归边界的区别,递归边界是问题必须满足的最后条件,而优化是在题目条件的限制上来减少计算量;
6.搜索算法并不只存在于数据结构的图论中,虽然最初接触DFS和BFS时是在数据结构中,但实际这是一种算法,当问题满足可以搜索的性质时,就可以运用搜索算法;
7.注意递归中参数的作用域;
8.全排列适合用分治解决,组合适合用搜索解决;


